
Robot công nghiệp
Hệ thống thị giác máy 2D/3D (2D/3D vision system) của cánh tay Robot công nghiệp

Cập nhật lần cuối 20 Tháng 6, 2025 bởi diu
Trong sản xuất hiện đại, cánh tay robot dù mạnh mẽ nhưng vẫn bị hạn chế bởi khuôn mẫu và đồ gá cố định, làm giảm tính linh hoạt. Hệ thống thị giác máy 2D/3D ra đời như một bước đột phá, giúp robot “nhìn thấy” và thích nghi với môi trường, từ đó xử lý vật thể đa dạng một cách thông minh. Bài viết sẽ phân tích nguyên lý hoạt động của thị giác máy 2D/3D, các ứng dụng nổi bật, lợi ích mang lại, thách thức cần khắc phục và xu hướng tương lai. Đồng thời, sẽ gợi ý cách lựa chọn hệ thống phù hợp để tối ưu hóa hiệu quả sản xuất.
1. Hiểu rõ Công nghệ: Thị giác Máy 2D và 3D
Để cánh tay robot có thể “nhìn” và hiểu môi trường, thị giác máy sử dụng các nguyên tắc quang học và xử lý hình ảnh để thu thập thông tin về vật thể. Có hai loại chính là thị giác máy 2D và 3D, mỗi loại có nguyên lý và ứng dụng riêng biệt.
1.1 Máy 2D (2D Vision System)
Hệ thống thị giác máy 2D thu nhận hình ảnh phẳng, chỉ cung cấp thông tin về hai chiều (X, Y) của vật thể.
- Nguyên lý hoạt động: Hệ thống thị giác máy 2D hoạt động bằng cách chụp lại hình ảnh của vật thể từ một góc nhìn duy nhất, giống như cách mắt người nhìn một bức ảnh. Camera chuyển đổi ánh sáng phản xạ từ vật thể thành tín hiệu điện tử, tạo ra một ma trận điểm ảnh (pixel) biểu diễn độ sáng và màu sắc. Phần mềm xử lý ảnh sau đó phân tích dữ liệu này để nhận diện các đặc điểm như hình dạng, kích thước, vị trí và hướng của vật thể trên một mặt phẳng.
- Thành phần chính: Một hệ thống thị giác 2D điển hình bao gồm các thành phần cơ bản như camera công nghiệp với độ phân giải và tốc độ khung hình phù hợp, ống kính để tập trung ánh sáng và tạo ra hình ảnh rõ nét, hệ thống chiếu sáng (ví dụ: đèn LED vòng, đèn nền) để làm nổi bật các đặc điểm của vật thể và loại bỏ bóng đổ, cùng với phần mềm xử lý ảnh để phân tích dữ liệu hình ảnh.
- Ưu điểm: Hệ thống thị giác 2D có ưu điểm về chi phí đầu tư thấp hơn đáng kể so với hệ thống 3D, khiến chúng trở thành lựa chọn kinh tế cho nhiều ứng dụng. Chúng cũng cung cấp tốc độ xử lý nhanh, phù hợp cho các dây chuyền sản xuất tốc độ cao và tương đối dễ triển khai, lập trình cho các tác vụ đơn giản như kiểm tra lỗi trên bề mặt phẳng, nhận diện mã vạch hoặc định vị vật thể không chồng chéo.
- Hạn chế: Hạn chế lớn nhất của thị giác 2D là không có thông tin về chiều sâu (trục Z) của vật thể. Điều này gây khó khăn khi xử lý các vật thể xếp chồng lên nhau (bin picking), các vật thể có bề mặt biến dạng, hoặc khi cần kiểm soát độ cao. Hệ thống này cũng nhạy cảm hơn với sự thay đổi của ánh sáng môi trường và bóng đổ, có thể làm giảm độ chính xác của việc nhận diện.

1.2 Thị giác Máy 3D (3D Vision System)
Hệ thống thị giác máy 3D thu nhận thông tin chiều sâu (Z) cùng với tọa độ X, Y, cho phép robot có cái nhìn hoàn chỉnh về không gian ba chiều của vật thể và môi trường.
Nguyên lý hoạt động: Hệ thống thị giác 3D sử dụng nhiều phương pháp để tái tạo thông tin chiều sâu:
- Ánh sáng cấu trúc (Structured Light): Phương pháp này chiếu một mẫu ánh sáng (ví dụ: các đường kẻ, lưới, hoặc điểm) lên bề mặt vật thể. Camera sau đó chụp lại hình ảnh của mẫu ánh sáng đã bị biến dạng bởi hình dạng của vật thể. Phần mềm phân tích sự biến dạng này để tính toán thông tin chiều sâu và tái tạo mô hình 3D của vật thể.
- Stereo Vision: Phương pháp Stereo Vision mô phỏng thị giác của con người bằng cách sử dụng hai camera được đặt ở một khoảng cách nhất định và hướng về cùng một khu vực. Hệ thống chụp hai bức ảnh của cùng một cảnh từ hai góc nhìn hơi khác nhau. Phần mềm sau đó phân tích sự sai khác (disparity) giữa các điểm ảnh tương ứng trong hai bức ảnh để tính toán thông tin chiều sâu của vật thể.
- Time-of-Flight (ToF): Công nghệ ToF đo thời gian mà một xung ánh sáng (thường là hồng ngoại) phát ra từ cảm biến đến vật thể và phản xạ trở lại. Bằng cách đo thời gian này, hệ thống có thể xác định khoảng cách đến từng điểm trên bề mặt vật thể, từ đó tạo ra bản đồ chiều sâu 3D.
- Laser Triangulation: Phương pháp này sử dụng một tia laser (thường là tia laser dạng đường thẳng) chiếu lên vật thể và một camera được đặt ở một góc nhất định. Khi tia laser quét qua bề mặt vật thể, camera chụp lại hình ảnh của đường laser đã bị biến dạng bởi hình dạng 3D của vật thể. Dựa trên vị trí của đường laser trong hình ảnh và góc của camera, hệ thống tính toán hình dạng 3D của vật thể.

Thành phần chính: Một hệ thống thị giác 3D thường bao gồm camera 3D chuyên dụng (có thể là camera ánh sáng cấu trúc, stereo camera, ToF camera hoặc camera laser), bộ xử lý mạnh mẽ có khả năng tính toán lượng lớn dữ liệu điểm đám mây (point cloud) theo thời gian thực, và phần mềm 3D phức tạp để xử lý, phân tích và cung cấp dữ liệu 3D cho robot.
Ưu điểm: Thị giác 3D cung cấp dữ liệu chiều sâu đầy đủ, cho phép robot xử lý các vật thể phức tạp, chồng chéo, và có hình dạng không đều một cách hiệu quả. Hệ thống này ít phụ thuộc hơn vào điều kiện ánh sáng môi trường so với 2D (đặc biệt là các hệ thống ánh sáng cấu trúc chủ động), và có khả năng phân biệt vật thể dựa trên hình dạng 3D thay vì chỉ 2D.
Hạn chế: Hạn chế chính của thị giác 3D là chi phí đầu tư cao hơn đáng kể. Chúng cũng yêu cầu năng lực xử lý và lưu trữ dữ liệu lớn, và phức tạp hơn trong việc triển khai, hiệu chuẩn và lập trình do tính chất đa chiều của dữ liệu. Một số phương pháp 3D có thể nhạy cảm với bề mặt bóng hoặc vật liệu trong suốt.
1.3 So sánh Thị giác 2D và 3D
Để lựa chọn công nghệ phù hợp, chúng ta có thể so sánh các yếu tố quan trọng giữa thị giác 2D và 3D:
| Tiêu chí So sánh | Thị giác Máy 2D (2D Vision) | Thị giác Máy 3D (3D Vision) |
| Thông tin thu được | Chỉ 2 chiều (X, Y) | 3 chiều (X, Y, Z) – Thông tin chiều sâu |
| Khả năng xử lý vật thể | Vật thể phẳng, không chồng chéo, cố định vị trí | Vật thể phức tạp, xếp chồng, ngẫu nhiên, không cố định vị trí |
| Độ phức tạp triển khai | Thấp hơn, dễ lập trình | Cao hơn, yêu cầu chuyên môn sâu |
| Chi phí đầu tư | Thấp hơn | Cao hơn |
| Tốc độ xử lý | Thường nhanh hơn cho tác vụ đơn giản | Có thể chậm hơn do lượng dữ liệu lớn, nhưng đang được cải thiện |
| Nhạy cảm ánh sáng | Nhạy cảm với ánh sáng môi trường và bóng đổ | Ít nhạy cảm hơn (đặc biệt với ánh sáng cấu trúc) |
| Ứng dụng điển hình | Kiểm tra lỗi bề mặt, nhận diện mã vạch, định vị đơn giản | Bin picking, lắp ráp phức tạp, kiểm tra kích thước 3D, hàn tự động |
2. Ứng dụng Đột phá của Hệ thống Thị giác Máy trong Cánh Tay Robot Công nghiệp
Việc tích hợp hệ thống thị giác máy 2D/3D đã mở ra những khả năng mới cho cánh tay robot, cho phép chúng thực hiện các tác vụ phức tạp và linh hoạt hơn nhiều trong môi trường sản xuất công nghiệp.
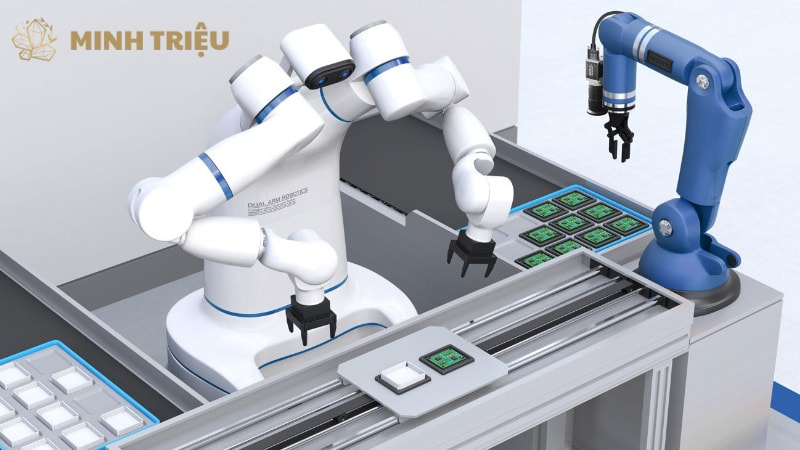
2.1 Gắp ngẫu nhiên (Bin Picking)
Thị giác 3D đã cách mạng hóa quy trình gắp vật thể ngẫu nhiên (bin picking), một trong những thách thức lớn nhất của tự động hóa. Trước đây, robot cần các đồ gá phức tạp hoặc vật thể phải được sắp xếp gọn gàng. Tuy nhiên, với thị giác 3D, robot có khả năng nhận diện và định vị các vật thể xếp chồng, lộn xộn trong thùng chứa một cách chính xác.
Hệ thống 3D tạo ra mô hình điểm đám mây của các vật thể, cho phép phần mềm xác định vị trí và hướng của từng chi tiết, sau đó hướng dẫn cánh tay robot với độ chính xác cao để gắp vật thể mà không va chạm. Lợi ích của Bin Picking là tự động hóa hoàn toàn quy trình cấp liệu, giảm thiểu sự can thiệp của con người, và tăng năng suất đáng kể trong các nhà máy sản xuất.
2.2 Lắp ráp Tinh vi và Chính xác
Trong các quy trình lắp ráp, thị giác máy 2D và 3D đóng vai trò quan trọng trong việc hướng dẫn robot đạt được độ chính xác cao. Thị giác 2D có thể định vị các lỗ, cạnh hoặc điểm tham chiếu trên các bề mặt phẳng để robot căn chỉnh linh kiện.
Đối với các tác vụ phức tạp hơn như lắp ráp linh kiện điện tử siêu nhỏ hoặc các bộ phận cơ khí có dung sai chặt chẽ, thị giác 3D cung cấp thông tin chiều sâu để robot căn chỉnh các chi tiết với độ chính xác micron. Hệ thống có thể bù trừ cho những sai lệch nhỏ về vị trí của chi tiết hoặc robot, đảm bảo chất lượng sản phẩm, giảm lỗi lắp ráp và tăng tốc độ sản xuất đáng kể.
2.3 Kiểm tra Chất lượng và Phát hiện Lỗi
Thị giác máy 2D và 3D là công cụ lý tưởng cho việc tự động hóa quy trình kiểm tra chất lượng. Hệ thống 2D có thể kiểm tra kích thước, hình dạng, màu sắc, vị trí của các linh kiện trên bề mặt phẳng, phát hiện các khuyết tật như vết nứt, bavia, trầy xước, hoặc lỗi in ấn.
Thị giác 3D mở rộng khả năng kiểm tra bằng cách đo lường các đặc tính 3D như độ cong, độ phẳng, hoặc độ sâu của vết lõm, giúp phát hiện các lỗi bề mặt phức tạp hơn mà thị giác 2D không thể thấy. Lợi ích là đảm bảo 100% sản phẩm đạt chất lượng trước khi xuất xưởng, loại bỏ sản phẩm lỗi khỏi dây chuyền, và nâng cao uy tín thương hiệu.
2.4 Hàn và Gia công Bề mặt
Trong các ứng dụng hàn và gia công bề mặt, thị giác 3D cung cấp khả năng dẫn đường cho robot với độ chính xác vượt trội. Robot hàn có thể sử dụng dữ liệu 3D để theo dõi đường hàn trên các chi tiết có hình dạng phức tạp hoặc không hoàn toàn đồng nhất, kiểm soát khoảng cách và góc độ của mỏ hàn một cách chính xác.
Tương tự, trong các tác vụ đánh bóng hoặc mài mòn, hệ thống thị giác 3D hướng dẫn robot duy trì lực và góc tiếp xúc tối ưu theo hình dạng của vật thể, đảm bảo bề mặt hoàn thiện đồng đều và chất lượng cao. Lợi ích bao gồm tạo ra mối hàn chất lượng cao, bề mặt hoàn thiện đồng đều, và giảm phế phẩm.
2.5 Phân loại và Sắp xếp
Thị giác máy 2D và 3D tự động hóa hiệu quả quá trình phân loại và sắp xếp sản phẩm. Hệ thống 2D có thể nhận diện và phân loại sản phẩm dựa trên các đặc điểm như màu sắc, hình dạng hoặc mã vạch. Đối với các sản phẩm có nhiều biến thể hoặc cần được sắp xếp vào các vị trí cụ thể trong không gian 3D, thị giác 3D cung cấp dữ liệu chi tiết để robot nhận diện chính xác và hướng dẫn robot đặt vật thể vào đúng vị trí và hướng.
Lợi ích của việc này là tự động hóa quá trình đóng gói, logistics, giảm sức lao động thủ công và giảm thiểu sai sót trong khâu phân loại.

2.6 Tương tác Người-Robot (Human-Robot Collaboration – HRC)
Trong các ứng dụng robot cộng tác, thị giác 3D đóng vai trò quan trọng trong việc đảm bảo an toàn và hiệu quả tương tác giữa con người và robot. Robot có khả năng nhận diện sự hiện diện và chuyển động của con người trong không gian làm việc của chúng.
Khi một người công nhân tiến vào khu vực nguy hiểm hoặc trong quá trình cộng tác, hệ thống thị giác sẽ cung cấp dữ liệu để robot tự động điều chỉnh tốc độ hoạt động hoặc dừng lại ngay lập tức để đảm bảo an toàn. Điều này cho phép robot và con người làm việc an toàn trong cùng một không gian, nâng cao hiệu quả cộng tác mà không cần hàng rào bảo vệ vật lý.
3. Lợi Ích Tối ưu khi Tích hợp Thị giác Máy vào Cánh Tay Robot
Việc trang bị hệ thống thị giác máy 2D/3D cho cánh tay robot mang lại những lợi ích vượt trội, biến chúng thành tài sản quý giá trong môi trường sản xuất công nghiệp hiện đại, góp phần thúc đẩy tự động hóa linh hoạt và hiệu quả.
3.1 Nâng cao Độ chính xác và Độ tin cậy
Thị giác máy khắc phục đáng kể sai số phát sinh do vị trí không cố định của vật thể hoặc các biến thể nhỏ trong quy trình sản xuất. Robot có thị giác có thể điều chỉnh hành vi của mình theo thời gian thực dựa trên thông tin hình ảnh thu được, đảm bảo kết quả nhất quán và độ chính xác cao hơn so với robot chỉ hoạt động theo lập trình cứng nhắc. Điều này dẫn đến giảm thiểu lỗi sản phẩm và tăng độ tin cậy của toàn bộ dây chuyền sản xuất.
3.2 Tăng cường Tính linh hoạt và Khả năng Thích ứng
Lợi ích cốt lõi của thị giác máy là cung cấp khả năng thích ứng cho robot. Robot giờ đây có thể xử lý các vật thể ngẫu nhiên, xếp chồng (bin picking), hoặc có hình dạng không đồng nhất mà không cần đồ gá cố định tốn kém và tốn thời gian. Điều này giảm đáng kể chi phí thiết lập ban đầu và nâng cao tính linh hoạt của dây chuyền sản xuất để đáp ứng nhu cầu thay đổi của thị trường và các loại sản phẩm khác nhau.
3.3 Giảm thiểu Chi phí Sản xuất và Lỗi
Việc tự động hóa quy trình kiểm tra chất lượng bằng thị giác máy giúp phát hiện và loại bỏ sản phẩm lỗi ngay từ đầu, giảm đáng kể chi phí phế phẩm và làm lại. Khả năng định vị chính xác của robot cũng giảm thiểu hư hỏng chi tiết trong quá trình lắp ráp hoặc xử lý, tiết kiệm nguyên vật liệu và giảm chi phí vận hành tổng thể. Điều này trực tiếp ảnh hưởng tích cực đến hiệu quả kinh tế của nhà máy.
3.4 Cải thiện Năng suất và Hiệu quả
Thị giác máy cho phép robot hoạt động với tốc độ chu kỳ nhanh hơn và liên tục mà không cần sự can thiệp thủ công. Khả năng xử lý các tác vụ phức tạp một cách tự động giảm sự phụ thuộc vào lao động thủ công, giải phóng nhân lực cho các công việc có giá trị cao hơn. Điều này tăng đáng kể năng suất tổng thể của dây chuyền sản xuất và tối ưu hóa hiệu quả hoạt động.
3.5 Đảm bảo An toàn Lao động
Trong các ứng dụng robot cộng tác (HRC), thị giác 3D đóng vai trò quan trọng trong việc đảm bảo an toàn cho con người. Robot có thể nhận diện sự hiện diện và chuyển động của công nhân trong không gian làm việc, tự động điều chỉnh tốc độ hoặc dừng lại để tránh va chạm. Điều này cho phép robot và con người làm việc an toàn trong cùng một khu vực mà không cần hàng rào bảo vệ vật lý, cải thiện môi trường làm việc và giảm rủi ro tai nạn.
3.6 Khả năng Thu thập Dữ liệu và Phân tích (Data-driven Insights)
Hệ thống thị giác máy tạo ra một lượng lớn dữ liệu hình ảnh và không gian về vật thể và quy trình sản xuất. Dữ liệu này có thể được thu thập và phân tích để tối ưu hóa quy trình, phát hiện xu hướng lỗi hoặc các điểm nghẽn trong sản xuất. Các thông tin chi tiết dựa trên dữ liệu giúp doanh nghiệp đưa ra quyết định sáng suốt hơn, cải thiện hiệu suất liên tục và thúc đẩy đổi mới.
4. Thách thức và Xu hướng Phát triển của Hệ thống Thị giác Máy
Mặc dù mang lại nhiều lợi ích, việc triển khai hệ thống thị giác máy 2D/3D trong cánh tay robot công nghiệp vẫn còn đối mặt với những thách thức nhất định. Tuy nhiên, ngành công nghiệp đang liên tục phát triển với những xu hướng mới để vượt qua các rào cản này.
4.1 Thách Thức Hiện Tại
Các thách thức chính khi triển khai thị giác máy bao gồm:
- Chi phí Đầu tư Ban Đầu: Chi phí ban đầu cho các hệ thống thị giác máy, đặc biệt là hệ thống 3D với phần cứng và phần mềm phức tạp, vẫn còn tương đối cao. Điều này có thể là rào cản đáng kể đối với các doanh nghiệp nhỏ và vừa muốn đầu tư vào công nghệ này.
- Độ Phức tạp Triển khai: Việc lắp đặt, hiệu chuẩn và lập trình hệ thống thị giác máy đòi hỏi chuyên môn cao về quang học, xử lý ảnh, lập trình robot và tích hợp hệ thống. Quá trình này có thể tốn thời gian và yêu cầu đội ngũ kỹ thuật có kinh nghiệm, làm tăng chi phí triển khai.
- Thử thách Môi trường: Một số loại bề mặt vật thể như bề mặt bóng, trong suốt, hoặc quá tối có thể gây khó khăn cho việc thu nhận hình ảnh chính xác. Điều kiện ánh sáng môi trường thay đổi (ví dụ: ánh sáng mặt trời chiếu vào, thay đổi đèn chiếu sáng) cũng có thể ảnh hưởng đến hiệu suất và độ ổn định của hệ thống thị giác.
- Tốc độ Xử lý: Trong các dây chuyền sản xuất tốc độ cao, yêu cầu xử lý dữ liệu lớn từ hệ thống thị giác (đặc biệt là 3D point cloud) trong thời gian thực là một thách thức. Đảm bảo độ trễ thấp và phản hồi nhanh cần phần cứng mạnh mẽ và thuật toán tối ưu.
4.2 Xu Hướng Phát triển Tương Lai
Ngành công nghiệp thị giác máy đang liên tục đổi mới để giải quyết các thách thức trên và đáp ứng nhu cầu ngày càng cao của sản xuất thông minh.
- Thị giác Máy tích hợp AI/Deep Learning: Xu hướng nổi bật nhất là kết hợp thị giác máy với trí tuệ nhân tạo (AI) và học sâu (Deep Learning). Các thuật toán này nâng cao đáng kể khả năng nhận diện vật thể phức tạp, phân biệt các biến thể nhỏ, và học hỏi từ dữ liệu hình ảnh để thích nghi với các điều kiện thay đổi. Điều này giúp robot xử lý các tác vụ khó hơn, ít cần lập trình thủ công và hiệu suất ổn định hơn trong môi trường không chắc chắn.
- Hệ thống Plug-and-Play (Cắm và Chạy): Các nhà phát triển đang hướng tới việc tạo ra các hệ thống thị giác dễ cài đặt và sử dụng hơn. Các giải pháp plug-and-play này giảm độ phức tạp trong việc cấu hình phần cứng và lập trình, cho phép các doanh nghiệp nhỏ và vừa dễ dàng triển khai công nghệ này mà không cần đội ngũ chuyên gia quá lớn.
- Thị giác Máy dựa trên Đám mây (Cloud-based Vision): Việc xử lý dữ liệu và thuật toán trên nền tảng đám mây là một xu hướng tiềm năng. Điều này giảm yêu cầu phần cứng cục bộ tại nhà máy, cho phép khả năng tính toán linh hoạt và truy cập vào các mô hình AI phức tạp mà không cần đầu tư lớn vào cơ sở hạ tầng tại chỗ.
- Cảm biến 3D Đa năng, Chi phí thấp: Công nghệ cảm biến 3D đang ngày càng được cải tiến để trở nên đa năng hơn, hoạt động tốt trong nhiều điều kiện ánh sáng và bề mặt vật thể. Đồng thời, các nhà sản xuất đang nỗ lực giảm giá thành của các cảm biến 3D, làm cho công nghệ này dễ tiếp cận hơn cho một phổ rộng các ứng dụng.
- Tích hợp sâu hơn vào HRC: Trong tương lai, hệ thống thị giác máy sẽ tích hợp sâu hơn vào các robot cộng tác để cải thiện khả năng nhận diện cử chỉ, ý định của con người. Điều này cho phép robot dự đoán và phản ứng một cách tự nhiên hơn với sự hiện diện của con người, tối ưu hóa quy trình cộng tác và nâng cao an toàn trong môi trường làm việc chung.
5. Kết Luận
Tóm lại, hệ thống thị giác máy 2D/3D đã và đang định hình lại cách thức cánh tay robot hoạt động trong môi trường sản xuất công nghiệp hiện đại. Chúng cung cấp cho robot “đôi mắt” thông minh, giúp chúng vượt qua những giới hạn truyền thống của lập trình cứng nhắc, nâng cao khả năng nhận thức, tương tác linh hoạt và thích ứng với các tình huống phức tạp.
Từ việc thực hiện Bin Picking hiệu quả, đảm bảo lắp ráp tinh vi, kiểm tra chất lượng tuyệt đối, đến việc nâng cao an toàn lao động trong các ứng dụng robot cộng tác, thị giác máy mang lại những lợi ích vượt trội cho doanh nghiệp. Với sự hội tụ của trí tuệ nhân tạo (AI), học sâu (Deep Learning) và các tiến bộ công nghệ liên tục, tiềm năng phát triển của thị giác máy là vô cùng to lớn.
Chúng sẽ tiếp tục thúc đẩy sự phát triển của tự động hóa thông minh và robot tự chủ, định hình lại bức tranh sản xuất công nghiệp toàn cầu. Đầu tư vào công nghệ thị giác máy không chỉ là một sự lựa chọn mà là một chiến lược thiết yếu để các doanh nghiệp tối ưu hóa quy trình, nâng cao hiệu quả hoạt động, và đón đầu kỷ nguyên sản xuất thông minh.