
Thiết bị chấp hành (Actuator)
ĐỘNG CƠ BƯỚC (STEPPER MOTOR) TRONG ACTUATOR: CHÌA KHÓA ĐỊNH VỊ CHÍNH XÁC TRONG SẢN XUẤT CÔNG NGHIỆP
Động cơ bước (Stepper motor) đại diện cho một loại hình Actuator điện tử then chốt, cung cấp khả năng điều khiển vị trí góc và tốc độ quay một cách tuyệt đối, biến đổi xung điện thành chuyển động cơ học rời rạc. Thiết bị chấp hành (Actuator) đóng vai trò cầu nối không thể thiếu giữa hệ thống điều khiển điện tử (Controller) và môi trường vật lý, thực hiện các lệnh tự động hóa cần thiết trong mọi quy trình sản xuất công nghiệp hiện đại.
Khác biệt lớn nhất của động cơ bước nằm ở nguyên lý hoạt động theo “bước”, cho phép hệ thống biết chính xác vị trí trục mà không cần bộ phản hồi phức tạp (encoder) trong các hệ thống điều khiển vòng hở thông thường. Chính nhờ tính năng vượt trội về định vị chính xác này, Stepper motor Actuator đã trở thành thành phần không thể thiếu trong các ứng dụng đòi hỏi độ lặp lại và độ phân giải cao.
1. Động cơ bước là gì?
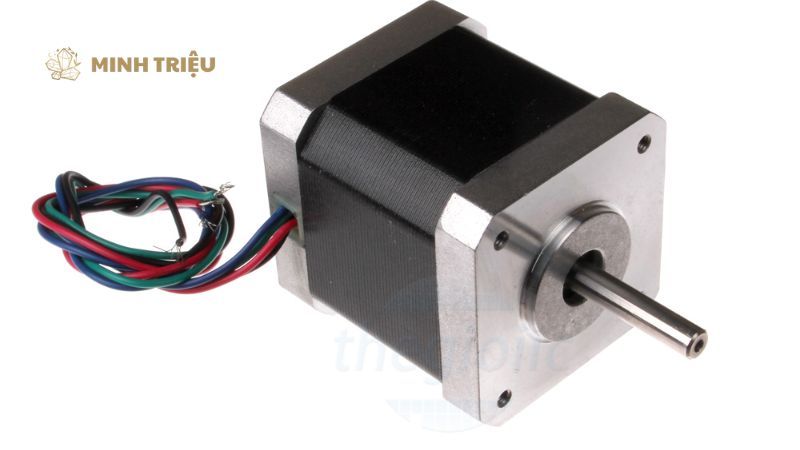
Động cơ bước (Stepper motor) là một thiết bị điện cơ học đặc biệt, chuyển đổi một chuỗi xung điện kỹ thuật số thành các chuyển động góc rời rạc trên trục quay. Định nghĩa này phân biệt Động cơ bước với động cơ DC thông thường, nơi điện áp quyết định tốc độ và cần phản hồi để xác định vị trí. Các Stepper motor được phân loại dựa trên thiết kế và vật liệu chế tạo, nhằm đáp ứng các yêu cầu tải và môi trường hoạt động khác nhau.
- Động cơ nam châm vĩnh cửu (Permanent Magnet Stepper): Rotor sử dụng nam châm vĩnh cửu tạo mô-men xoắn lớn hơn.
- Động cơ từ trở thay đổi (Variable Reluctance Stepper): Rotor làm bằng vật liệu mềm, không cần nam châm vĩnh cửu.
- Động cơ lai (Hybrid Stepper): Kết hợp các ưu điểm của hai loại trên, mang lại độ phân giải cao và mô-men xoắn mạnh mẽ hơn.
Nguyên lý hoạt động của Stepper motor dựa trên sự tương tác có kiểm soát giữa từ trường stator và rotor, tạo ra sự dịch chuyển góc từng bước. Stator motor chứa các cuộn dây điện từ được cấp năng lượng theo một trình tự cụ thể, tạo ra từ trường quay. Rotor cố gắng căn chỉnh với từ trường mới này, tạo ra một dịch chuyển góc chính xác, gọi là góc bước (step angle).
| Khái niệm | Định nghĩa | Tác động trong Actuator |
|---|---|---|
| Góc bước | Góc quay tối thiểu mà trục motor có thể di chuyển trong một xung điện. | Xác định độ chính xác định vị cơ bản của Actuator. |
| Pha | Số lượng cuộn dây độc lập trong Stator. | Ảnh hưởng đến sơ đồ đấu dây (đơn cực/lưỡng cực) và mô-men xoắn. |
| Hệ thống vòng hở | Điều khiển không cần cảm biến phản hồi vị trí. | Giảm chi phí và độ phức tạp hệ thống Actuator. |
Sự khác biệt cốt lõi giữa Động cơ bước và động cơ DC thông thường nằm ở phương thức điều khiển chuyển động. Động cơ DC thay đổi tốc độ quay bằng cách điều chỉnh điện áp, trong khi Động cơ bước Actuator điều khiển vị trí chính xác thông qua số lượng và tần suất xung điện được cấp tới cuộn dây. Điều này có nghĩa là mỗi xung điện tử tương đương với một dịch chuyển cơ học đã được xác định trước, làm cho Stepper motor trở thành lựa chọn tối ưu cho các ứng dụng định vị chính xác.
Các thông số kỹ thuật chính định hình hiệu suất Actuator của Stepper motor bao gồm độ phân giải (Resolution) và mô-men xoắn (Torque). Độ phân giải motor xác định số bước motor thực hiện để hoàn thành một vòng quay 360 độ, quyết định mức độ chi tiết mà Actuator có thể đạt được. Mô-men giữ (Holding Torque) là lực xoắn motor duy trì khi các cuộn dây được cấp điện nhưng trục không quay, đảm bảo vị trí được giữ vững. Mô-men động (Dynamic Torque) lại là mô-men xoắn motor có thể sinh ra khi đang quay, yếu tố quan trọng quyết định khả năng Actuator di chuyển tải trọng. Tốc độ tối đa của Động cơ bước thường bị giới hạn bởi mô-men xoắn giảm dần theo tần số xung, đòi hỏi sự cân bằng giữa tốc độ và lực Actuator.
2. Vai trò và Ứng dụng của Động cơ bước trong Actuator
Động cơ bước sở hữu nhiều ưu điểm khiến nó trở thành Actuator lý tưởng cho nhiều ứng dụng tự động hóa đòi hỏi sự ổn định và độ tin cậy. Ưu điểm nổi bật nhất nằm ở độ chính xác và độ lặp lại cao (Perfect Positioning), cho phép Actuator quay trở lại cùng một vị trí với sai số gần như bằng không.
Điều khiển vòng hở (Open-loop control) đơn giản hóa kiến trúc hệ thống, loại bỏ sự cần thiết của cảm biến phản hồi đắt tiền như encoder trong nhiều tình huống, giảm chi phí tổng thể của Actuator. Mô-men xoắn lớn ở tốc độ thấp cung cấp khả năng khởi động mạnh mẽ và duy trì tải trọng tĩnh một cách hiệu quả, đặc biệt quan trọng trong các máy công cụ.
- Đơn giản hóa điều khiển: Chỉ cần chuỗi xung đơn giản để xác định vị trí.
- Chi phí thấp hơn: Không yêu cầu bộ mã hóa phức tạp như Actuator Servo.
- Độ bền cơ học: Thiết kế đơn giản, ít chổi than, tuổi thọ cao trong môi trường sản xuất công nghiệp.
Ứng dụng cụ thể của Động cơ bước Actuator lan rộng khắp các ngành công nghiệp nhờ khả năng kiểm soát chuyển động vi mô của chúng. Trong Actuator Định vị (Positioning Actuator), Động cơ bước đóng vai trò trung tâm trong các thiết bị như máy CNC, máy in 3D, và máy cắt laser, nơi Actuator phải di chuyển đầu công cụ theo tọa độ X-Y-Z với độ chính xác micron. Actuator Điều khiển dòng chảy/Van (Fluid Control Actuator) sử dụng motor bước để điều khiển van tỷ lệ (proportional valve) hoặc bơm nhu động (peristaltic pump), đảm bảo liều lượng chất lỏng được phân phối với độ chính xác liều lượng tuyệt đối trong các hệ thống y tế và phòng thí nghiệm.
Actuator trong Robot thường thấy motor bước được sử dụng trong các khớp nối cần di chuyển chính xác nhưng không yêu cầu tốc độ cao, đặc biệt là trong robot công nghiệp nhỏ và các thiết bị tự động hóa kiểm tra linh kiện. Cuối cùng, Actuator trong Thiết bị Quang học sử dụng motor bước để điều khiển tiêu cự, zoom tự động, hoặc định vị các gương phản xạ với dịch chuyển micro tinh tế.
| Lĩnh vực Ứng dụng | Mục tiêu Actuator | Yếu tố Động cơ bước quan trọng |
|---|---|---|
| Máy CNC / In 3D | Định vị công cụ chính xác (X, Y, Z). | Độ lặp lại và Độ phân giải cao. |
| Thiết bị Y tế | Điều khiển bơm/van phân liều lượng. | Độ chính xác liều lượng, Mô-men giữ. |
| Kỹ thuật Quang học | Điều chỉnh tiêu cự, định hướng laser. | Dịch chuyển micro, Điều khiển vi bước. |
| Robot Nhỏ | Điều khiển các khớp nối tay gắp. | Điều khiển vòng hở đơn giản, Mô-men xoắn khởi động. |
3. Phương pháp Điều khiển và Tối ưu hóa Actuator Động cơ bước
Các chế độ điều khiển cơ bản xác định cách Actuator Động cơ bước hoạt động, từ đó ảnh hưởng đến hiệu suất và độ mượt của chuyển động. Chế độ Full-step (Bước đủ) là phương pháp đơn giản nhất, trong đó motor di chuyển một góc bước đầy đủ sau mỗi lần thay đổi trạng thái cuộn dây. Chế độ Half-step (Nửa bước) xen kẽ giữa việc cấp điện cho một pha và hai pha cùng lúc, giảm góc bước đi một nửa và tăng gấp đôi độ phân giải Actuator.

Microstepping (Điều khiển vi bước) là kỹ thuật tối ưu hóa cốt lõi, cho phép Actuator chia nhỏ góc bước vật lý thành hàng trăm, thậm chí hàng nghìn bước nhỏ hơn. Microstepping Actuator hoạt động bằng cách điều chỉnh dòng điện Sine và Cosine cung cấp cho các cuộn dây motor, tạo ra sự dịch chuyển từ trường mượt mà hơn. Vai trò của Microstepping bao gồm: tăng độ phân giải định vị Actuator lên đáng kể, giảm rung động cơ học và giảm tiếng ồn vận hành. Điều này làm cho Động cơ bước phù hợp với các ứng dụng nhạy cảm như thiết bị quét hình ảnh hoặc các Actuator cần vận hành êm ái.
- Full-step: Tốc độ cao nhất, độ phân giải thấp nhất, rung động lớn.
- Half-step: Cân bằng giữa tốc độ và độ phân giải, giảm rung động vừa phải.
- Microstepping: Độ phân giải tối đa, chuyển động mượt mà nhất, thích hợp cho định vị chính xác cấp độ vi mô.
Điều khiển Vòng kín (Closed-loop Stepper Actuator) khắc phục hạn chế lớn nhất của motor bước, cụ thể là hiện tượng mất bước (Step loss). Lý do cần encoder (bộ mã hóa vòng quay) là để Actuator theo dõi vị trí thực tế của trục motor, so sánh nó với vị trí mong muốn từ Controller. Hệ thống vòng kín này cho phép Actuator tự động bù đắp và hiệu chỉnh khi motor bị quá tải, tối ưu hóa hiệu suất bằng cách chỉ sử dụng dòng điện cần thiết, và khắc phục hiện tượng mất bước hoàn toàn. Sự kết hợp này mang lại hiệu suất gần giống Động cơ Servo nhưng vẫn giữ được cấu trúc Actuator đơn giản của motor bước.
Lựa chọn Driver (Bộ điều khiển) đóng vai trò quyết định đối với hiệu suất Actuator Động cơ bước. Tầm quan trọng của Driver nằm ở khả năng điều khiển chính xác dòng điện qua cuộn dây và thực hiện kỹ thuật Microstepping. Driver hiện đại cung cấp các tính năng như tự động giảm dòng khi motor giữ vị trí, bảo vệ quá nhiệt, và thuật toán điều khiển động cơ bước thông minh, đảm bảo motor hoạt động ổn định và hiệu quả, tối đa hóa mô-men xoắn Actuator ở mọi dải tốc độ.
4. So sánh và Hạn chế
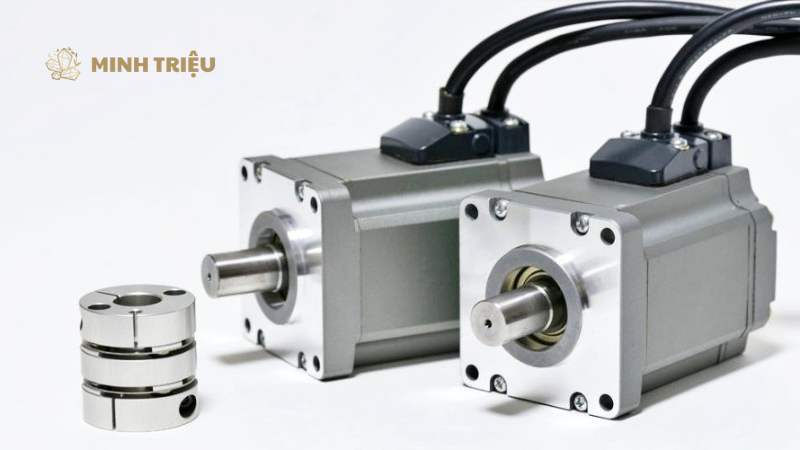
Sự khác biệt rõ rệt giữa Động cơ bước và Động cơ Servo quyết định Actuator nào phù hợp với ứng dụng cụ thể, đặc biệt trong sản xuất công nghiệp. Động cơ bước Actuator nổi trội về điều khiển vị trí chính xác trong hệ thống điều khiển vòng hở và chi phí thấp hơn cho các ứng dụng tải nhẹ đến trung bình. Ngược lại, Động cơ Servo Actuator luôn hoạt động ở chế độ vòng kín, sử dụng encoder để phản hồi liên tục, cho phép nó đạt được tốc độ cao hơn nhiều, mô-men xoắn lớn hơn trên toàn dải tốc độ, và hiệu suất năng lượng tốt hơn.

Bảng so sánh Động cơ bước và Động cơ Servo trong Actuator:
| Tính năng | Động cơ bước (Stepper Motor Actuator) | Động cơ Servo (Servo Motor Actuator) |
|---|---|---|
| Cơ chế Điều khiển | Điều khiển Vòng hở (thường); Vòng kín (tùy chọn). | Luôn là Vòng kín (yêu cầu phản hồi encoder). |
| Tốc độ tối đa | Thấp (thường < 1000 RPM). | Rất cao (thường > 3000 RPM). |
| Mô-men xoắn | Mạnh ở tốc độ thấp; Giảm mạnh ở tốc độ cao. | Mạnh và ổn định trên toàn dải tốc độ. |
| Nguy cơ Mất vị trí | Có (nếu quá tải), trừ khi dùng vòng kín. | Rất hiếm (nhờ cơ chế phản hồi liên tục). |
| Độ phức tạp | Đơn giản, dễ cài đặt. | Phức tạp hơn (Actuator + Driver + Encoder). |
| Ứng dụng điển hình | Máy in 3D, Actuator van, Thiết bị định vị nhẹ. | Robot công nghiệp, Máy CNC tải nặng, Máy đóng gói tốc độ cao. |
Động cơ bước Actuator đối mặt với một số thách thức và hạn chế kỹ thuật cần được xem xét khi thiết kế hệ thống tự động hóa. Giới hạn tốc độ cao và giảm mô-men xoắn ở tốc độ cao là vấn đề cố hữu, khi tần suất xung tăng lên, motor không kịp căn chỉnh với từ trường quay, dẫn đến mô-men xoắn sụt giảm đáng kể. Hiện tượng mất bước (Step loss) xảy ra khi tải cơ học vượt quá mô-men động của motor, hoặc khi tăng tốc quá nhanh, khiến motor bỏ lỡ (miss) các xung điện, dẫn đến mất vị trí tuyệt đối.
Đây là lý do tại sao các Actuator motor bước quan trọng thường được nâng cấp lên hệ thống vòng kín. Cuối cùng, Động cơ bước tiêu thụ năng lượng đáng kể ngay cả khi ở trạng thái giữ (Holding), do các cuộn dây phải liên tục được cấp dòng để duy trì Mô-men giữ, làm giảm hiệu suất năng lượng tổng thể so với các Actuator khác.
5. Kết luận
Động cơ bước thiết lập vị thế không thể thay thế trong ngành Actuator, đặc biệt trong những hệ thống sản xuất công nghiệp cần điều khiển vị trí chính xác với yêu cầu về chi phí và độ phức tạp thấp. Khả năng dịch chuyển góc một cách rời rạc, có thể kiểm soát hoàn toàn bằng xung điện, là nền tảng cho định vị chính xác trong các ứng dụng từ máy CNC cơ bản đến thiết bị phân tích y tế tinh vi. Mặc dù có những hạn chế về tốc độ và nguy cơ mất bước trong điều khiển vòng hở, các kỹ thuật như Microstepping và sự phát triển của Closed-loop Stepper Actuator đã nâng cao đáng kể hiệu suất và độ tin cậy của chúng.