
Thiết bị chấp hành (Actuator)
Cảm biến Vị trí (Position Sensor) cho Actuator: Yếu tố Quyết định Độ Chính xác và Tự động hóa Vòng kín

Cảm biến vị trí (Position sensor) là thành phần sống còn, nó cung cấp dữ liệu phản hồi thời gian thực về vị trí hoặc góc quay của Thiết bị chấp hành (Actuator). Thiết bị này là nhân tố then chốt quyết định Độ chính xác và Độ lặp lại (Repeatability) trong mọi quy trình Sản xuất công nghiệp hiện đại. Sự hoạt động hiệu quả của Actuator phụ thuộc hoàn toàn vào thông tin phản hồi này, cho phép bộ điều khiển xác định chính xác thiết bị đang ở đâu và cần di chuyển bao xa.
Nếu không có Cảm biến vị trí (Position sensor), Thiết bị chấp hành (Actuator) chỉ có thể hoạt động ở chế độ Vòng hở (Open-Loop), điều này dẫn đến sai số tích lũy và không thể đạt được siêu chính xác (Ultra-precision). Việc ứng dụng Cảm biến vị trí (Position sensor) đã chuyển đổi các hệ thống cơ khí thô sơ thành các giải pháp Tự động hóa linh hoạt và có Độ tin cậy (Reliability) cao.
1. Các Loại Cảm biến Vị trí Phổ biến cho Actuator
1.1. Cảm biến Tuyến tính (Linear Sensor) cho Actuator Thủy lực và Khí nén
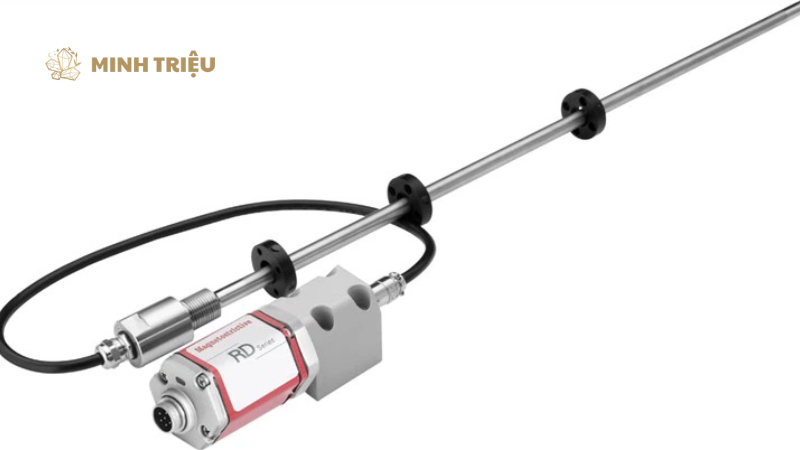
Cảm biến Tuyến tính được sử dụng để đo Hành trình (Stroke) tịnh tiến của Actuator Thủy lực và Motor Tuyến tính, nó biến chuyển động cơ học thành tín hiệu điện tỷ lệ. Đối với Actuator Thủy lực và Khí nén, Cảm biến Tuyến tính thường được tích hợp bên trong xilanh, để cung cấp phản hồi vị trí piston.
Các loại phổ biến của Cảm biến vị trí (Position sensor) Tuyến tính bao gồm Cảm biến vị trí chiết áp (Potentiometric), Cảm biến vị trí từ tính (Magnetostrictive), và Thước quang (Linear Scale). Tiêu chí lựa chọn chính là cần Độ chính xác cao và khả năng chịu áp suất, đồng thời chống ẩm và chống rung lắc trong Môi trường khắc nghiệt (ví dụ: nhiệt độ cao, dầu mỡ). Cảm biến vị trí từ tính (Magnetostrictive) được ưa chuộng cho Actuator Thủy lực vì chúng có Độ bền và có thể chịu được áp suất vận hành lên đến hàng trăm bar.
1.2. Cảm biến Góc (Rotary/Angular Sensor) cho Actuator Quay và Motor Servo
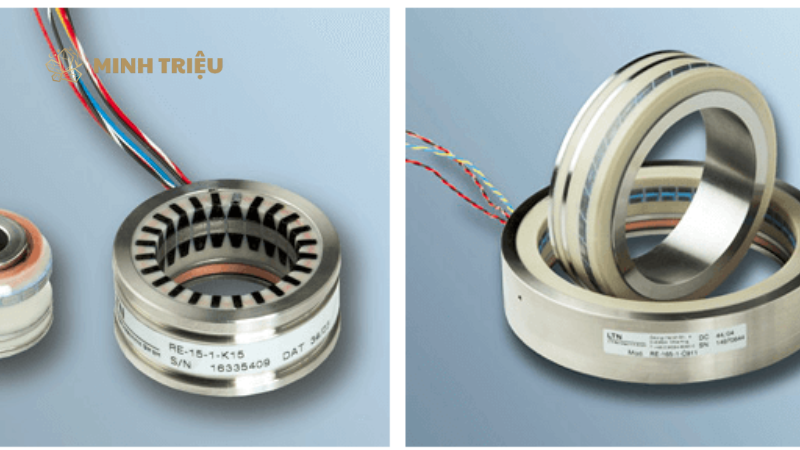
Cảm biến Góc là thiết bị bắt buộc, nó đo lường góc quay hoặc tốc độ quay của Motor Servo và Actuator Mô-men xoắn Trực tiếp, chuyển đổi chuyển động quay thành tín hiệu là nền tảng điều khiển. Cảm biến Góc được lắp đặt trực tiếp trên trục quay của motor, cung cấp thông tin vị trí góc tức thời. Các loại phổ biến bao gồm Encoder (Quang học/Từ tính) và Resolver.
Ưu điểm vượt trội là Encoder cung cấp Độ phân giải cực cao (Absolute hoặc Incremental), là nền tảng để đạt được Tốc độ phản hồi nhanh cần thiết cho Motor Servo hoạt động theo Hệ thống Vòng kín (Closed-Loop). Resolver là lựa chọn có Độ bền cao hơn trong Môi trường khắc nghiệt, thích hợp cho các ứng dụng rung động mạnh hoặc có nhiệt độ hoạt động khắc nghiệt.
Bảng 1: Phân loại và Ứng dụng Cảm biến Vị trí Actuator
| Loại Cảm biến | Kiểu Chuyển động | Nguyên lý Ưu tiên | Ứng dụng Tiêu biểu | Độ phân giải (Đặc tính) |
|---|---|---|---|---|
| Cảm biến Tuyến tính Từ tính | Tịnh tiến (Hành trình (Stroke)) | Từ tính (Magnetostrictive) | Actuator Thủy lực, Motor Tuyến tính | Tốt (Micron) |
| Encoder Quang học | Góc/Quay | Quang học (Optical) | Motor Servo, Thiết bị CNC | Cực cao (Nanometer) |
| Resolver | Góc/Quay | Cảm ứng (Inductive) | Hàng không, Môi trường khắc nghiệt | Trung bình/Tốt (Tương tự) |
| Thước quang | Tịnh tiến (Hành trình (Stroke)) | Quang học | Thiết bị đo lường siêu chính xác | Rất cao (Sub-micron) |
2. Nguyên lý Hoạt động và Đặc tính Kỹ thuật
2.1. Nguyên lý Từ tính (Magnetic), Quang học (Optical) và Cảm ứng (Inductive)
Nguyên lý Từ tính hoạt động dựa trên sự thay đổi từ trường, cung cấp Độ bền và khả năng chống bụi bẩn tốt, thích hợp cho Môi trường khắc nghiệt (ví dụ: Encoder Từ tính). Trong cảm biến từ tính, bộ phận cốt lõi bao gồm một thanh nam châm vĩnh cửu và các cảm biến Hall Effect, tạo ra tín hiệu điện tỷ lệ với cường độ từ trường. Nguyên lý Quang học cung cấp Độ phân giải và Độ chính xác cao nhất (ví dụ: Encoder Quang học), thông qua việc sử dụng đĩa chia vạch được chiếu sáng và các đầu đọc quang học đếm xung.
Tuy nhiên, nó lại dễ bị ảnh hưởng bởi bụi và rung động, là hạn chế khi sử dụng trong môi trường bẩn. Nguyên lý Cảm ứng (Inductive), thường thấy trong Resolver, sử dụng cuộn dây để cảm nhận vị trí thông qua sự thay đổi trở kháng (impedance), có Độ bền cơ học tuyệt vời và Độ lặp lại (Repeatability) cao do hoạt động không tiếp xúc và cấu trúc rắn chắc.
2.2. Tiêu chí Kỹ thuật: Độ phân giải, Độ lặp lại và Tốc độ phản hồi
Các tiêu chí kỹ thuật bao gồm Độ phân giải (Resolution), Độ lặp lại (Repeatability) và Tốc độ phản hồi là những tham số xác định Hiệu suất cao của Cảm biến vị trí (Position sensor) trong Hệ thống Vòng kín (Closed-Loop). Độ phân giải (Resolution) là khoảng cách nhỏ nhất mà Cảm biến vị trí (Position sensor) có thể đo được (ví dụ: micron hoặc nanometer), là yếu tố then chốt cho các ứng dụng siêu chính xác (Ultra-precision) như Motor Tuyến tính.
Độ lặp lại (Repeatability) là khả năng đo cùng một vị trí với cùng một giá trị trong nhiều lần đo lặp lại, là thước đo Độ tin cậy (Reliability) thực tế. Tốc độ phản hồi (Response Speed) là Tốc độ truyền dữ liệu vị trí về bộ điều khiển (PLC/Servo Driver), quyết định Tốc độ phản hồi tổng thể của Hệ thống Vòng kín (Closed-Loop), rất quan trọng đối với các quy trình động học nhanh.
- Độ tuyến tính (Linearity): Sai số lớn nhất giữa giá trị đo được và giá trị lý thuyết.
- Độ chính xác tuyệt đối (Absolute Accuracy): Sai số tổng thể của phép đo trên toàn bộ Hành trình (Stroke).
- Tần số cắt (Cut-off Frequency): Khả năng xử lý các thay đổi vị trí nhanh (liên quan đến Tốc độ).
- Khả năng Chịu nhiễu EMI: Khả năng chống lại nhiễu điện từ thường gặp trong Sản xuất công nghiệp.
3. Tích hợp Cảm biến trong Hệ thống Vòng kín (Closed-Loop)
3.1. Vai trò của Encoder và Resolver trong Actuator Servo
Encoder là lựa chọn phổ biến nhất cho Motor Servo, cung cấp tín hiệu số chính xác về vị trí và Tốc độ, là nền tảng của Hệ thống Vòng kín (Closed-Loop) được sử dụng rộng rãi. Encoder tuyệt đối (Absolute Encoder) cung cấp vị trí duy nhất ngay khi bật nguồn, là yếu tố cần thiết cho các hệ thống không cần tham chiếu lại (homing). Resolver là Cảm biến vị trí (Position sensor) tương tự điện tử, nổi bật với Độ bền cơ học và khả năng chịu nhiệt cao, thường được sử dụng trong các ứng dụng hàng không và Môi trường khắc nghiệt đòi hỏi Độ tin cậy (Reliability) vượt trội.
Định vị Nanometer (Nanopositioning) đòi hỏi các hệ thống siêu chính xác (Ultra-precision) sử dụng Encoder có Độ phân giải cực cao (thường là quang học) và bộ điều khiển phải có thuật toán bù trừ lỗi tinh vi để duy trì sự ổn định ở cấp độ nhỏ nhất.
3.2. Xử lý Tín hiệu và Giao thức Truyền thông
Việc xử lý tín hiệu và lựa chọn giao thức truyền thông là rất quan trọng, nó ảnh hưởng đến Tốc độ phản hồi và Độ tin cậy (Reliability) của dữ liệu từ Cảm biến vị trí (Position sensor). Tín hiệu Analog vs. Digital: Tín hiệu Cảm biến vị trí (Position sensor) Analog (0-10V, 4-20mA) đơn giản và dễ lắp đặt, nhưng dễ bị nhiễu làm giảm Độ chính xác. Tín hiệu Digital (SSI, BiSS, Profibus) cung cấp Độ chính xác cao hơn và Độ tin cậy (Reliability) tốt hơn, do ít bị ảnh hưởng bởi nhiễu điện từ.
Giao thức Fieldbus/Ethernet: Việc sử dụng các giao thức hiện đại như EtherCAT hoặc Profinet cho phép Cảm biến vị trí (Position sensor) truyền lượng lớn dữ liệu thời gian thực về bộ điều khiển, cần thiết cho các hệ thống Tự động hóa phức tạp có nhiều trục đồng bộ.
Bảng 2: So sánh Giao thức Tín hiệu Cảm biến Vị trí Actuator
| Giao thức | Loại Tín hiệu | Ưu điểm Chính | Nhược điểm | Ứng dụng Phù hợp |
|---|---|---|---|---|
| Analog (4-20mA) | Tương tự | Đơn giản, Độ bền cao | Dễ bị nhiễu, Độ phân giải thấp | Actuator Thủy lực đơn giản, Công nghiệp quy trình |
| SSI (Synchronous Serial Interface) | Số | Độ chính xác cao, Độ tin cậy (Reliability) | Tốc độ giới hạn (Tốc độ phản hồi) | Encoder tuyệt đối, Motor Servo cơ bản |
| EtherCAT/Profinet | Ethernet/Digital | Tốc độ phản hồi cực nhanh, thời gian thực | Chi phí cao, Yêu cầu bộ điều khiển phức tạp | Motor Tuyến tính, Tự động hóa phức tạp |
4. Lựa chọn Cảm biến cho Môi trường Khắc nghiệt và Ứng dụng Siêu chính xác
4.1. Tiêu chuẩn IP: Khả năng Chịu Nhiệt, Chống Rung và Chống Bụi
Cảm biến vị trí (Position sensor) cho Môi trường khắc nghiệt phải có Tiêu chuẩn IP (Ingress Protection) cao (ví dụ: IP67 hoặc IP68), để chống lại sự xâm nhập của nước, bụi và chất lỏng công nghiệp. Tiêu chuẩn IP cao đảm bảo rằng bộ phận cốt lõi của cảm biến được bảo vệ khỏi các tác nhân gây hỏng hóc từ bên ngoài. Khả năng Chịu Nhiệt là một yếu tố cần được đánh giá nghiêm ngặt; Các cảm biến sử dụng trong môi trường nóng (như lò nung, Actuator Thủy lực) phải có vật liệu chế tạo đặc biệt và khả năng Kiểm soát Nhiệt tốt để duy trì Độ chính xác. Chống Rung cũng là một yêu cầu bắt buộc; Cảm biến vị trí (Position sensor) phải có Độ bền cơ học cao và được lắp đặt chắc chắn, để tránh rung động làm mất Độ lặp lại (Repeatability) và gây ra sai số định vị.
- Chống Sốc/Rung (Shock/Vibration Resistance): Cần thiết cho Actuator di động nhanh hoặc hoạt động gần máy ép.
- Khả năng Chịu Áp suất: Bắt buộc cho Cảm biến Tuyến tính được tích hợp trong Actuator Thủy lực có áp suất cao.
- Vật liệu Vỏ Bọc: Cần sử dụng thép không gỉ hoặc Hợp kim chống ăn mòn.

4.2. Ứng dụng Định vị Nanometer (Nanopositioning)
Các hệ thống Định vị Nanometer (Nanopositioning) sử dụng Cảm biến vị trí (Position sensor) chuyên dụng, để đạt được Độ phân giải dưới nanometer là cần thiết cho siêu chính xác (Ultra-precision). Actuator áp điện là Thiết bị chấp hành (Actuator) phổ biến nhất cho ứng dụng này, thường sử dụng Cảm biến vị trí (Position sensor) điện dung hoặc quang học siêu nhỏ được tích hợp trực tiếp.
Kiểm soát Độ trễ (Hysteresis) là một thách thức lớn nhất trong các hệ thống siêu chính xác (Ultra-precision), Cảm biến vị trí (Position sensor) không chỉ đo vị trí mà còn cung cấp dữ liệu thời gian thực để bộ điều khiển bù trừ Độ trễ (Hysteresis), một lỗi phi tuyến tính vốn có trong vật liệu áp điện. Điều này yêu cầu Tốc độ phản hồi của cảm biến phải cực kỳ nhanh, để việc bù trừ được thực hiện hiệu quả.
Bảng 3: Yêu cầu Kỹ thuật Actuator Siêu Chính xác
| Tiêu chí | Cảm biến Khuyến nghị | Mức Độ phân giải Yêu cầu | Actuator Ứng dụng |
|---|---|---|---|
| Định vị Nanometer | Encoder Quang học có phân giải cao | < 1 nm | Kính hiển vi lực nguyên tử (AFM), Công nghiệp Bán dẫn |
| Kiểm soát Độ trễ (Hysteresis) | Cảm biến vị trí Điện dung | < 10 nm | Actuator áp điện, Quang học độ Độ chính xác cao |
| Tốc độ phản hồi | Giao thức BiSS/EtherCAT | > 50 kHz | Motor Tuyến tính tốc độ cao, Hệ thống Vision |
5. Kết luận
Tương lai của công nghệ Cảm biến vị trí (Position sensor) sẽ hướng tới việc tích hợp cảm biến thông minh trực tiếp vào bộ phận cốt lõi của Thiết bị chấp hành (Actuator) (gọi là Smart Actuators), nhằm tăng Độ tin cậy (Reliability) và Hiệu suất cao đạt được trong các hệ thống Tự động hóa tương lai. Sự phát triển này được thúc đẩy bởi nhu cầu về siêu chính xác (Ultra-precision) và Tốc độ cao trong Sản xuất công nghiệp 4.0. Xu hướng sẽ tập trung vào Cảm biến vị trí (Position sensor) không tiếp xúc có Độ bền cao, loại bỏ hoàn toàn mài mòn cơ học và giảm thiểu bảo trì.
Mục tiêu cuối cùng là cung cấp dữ liệu siêu chính xác (Ultra-precision) và Tốc độ phản hồi gần như tức thì, để đáp ứng nhu cầu Tự động hóa ngày càng cao của Motor Tuyến tính và các hệ thống Định vị Nanometer (Nanopositioning). Hệ thống Vòng kín (Closed-Loop) sẽ trở nên phức tạp hơn, tích hợp khả năng chẩn đoán thời gian thực và tự hiệu chỉnh lỗi Độ trễ (Hysteresis) và Kiểm soát Nhiệt để duy trì Độ chính xác tối đa.