
Thiết bị chấp hành (Actuator)
Bộ Điều Khiển Động Cơ (Motor Driver) cho Actuator: Vai Trò Cốt Lõi và Ứng Dụng Trong Tự Động Hóa Công Nghiệp

Thiết bị chấp hành (Actuator) đóng vai trò là cơ bắp thực hiện các mệnh lệnh chuyển động vật lý trong mọi quy trình tự động hóa công nghiệp. Actuator, ví dụ như van điều khiển, xi lanh điện, hay tay máy robot, chuyển đổi năng lượng điện hoặc khí nén thành lực hoặc chuyển động tịnh tiến/quay. Tuy nhiên, các bộ xử lý trung tâm như PLC (Programmable Logic Controller) hay Vi điều khiển chỉ có khả năng cung cấp tín hiệu điều khiển có công suất rất thấp. Motor Driver (Bộ điều khiển động cơ) xuất hiện như một giải pháp công nghệ cầu nối và khuếch đại giữa tầng điều khiển logic và Actuator công suất lớn, đảm bảo Actuator vận hành chính xác và an toàn theo yêu cầu của hệ thống.
1. Actuator và Motor Driver: Định Nghĩa và Mối Quan Hệ Cộng Sinh
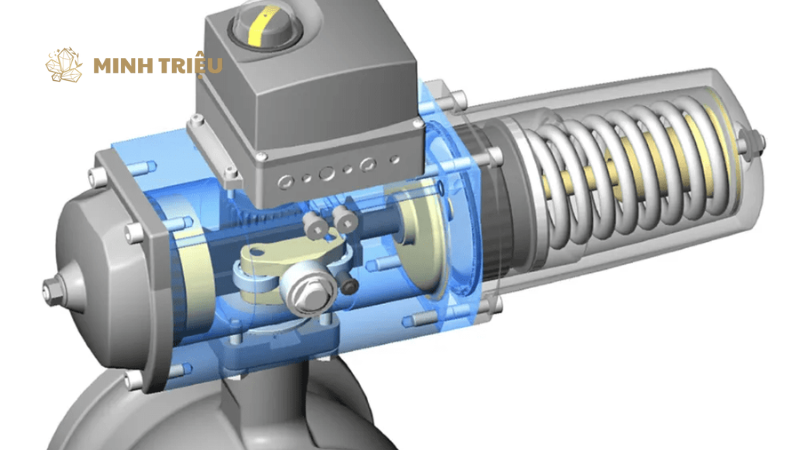
1.1. Actuator (Thiết bị chấp hành) là gì?
Actuator là thiết bị tạo ra chuyển động, phản ứng lại tín hiệu điều khiển. Chức năng chính của Actuator bao gồm việc chuyển đổi năng lượng từ một nguồn cấp (điện, khí nén, thủy lực) thành chuyển động cơ học.
- Actuator Điện (Electrical Actuators): Sử dụng động cơ điện (DC, AC, Stepper, Servo). Loại này được ưa chuộng vì khả năng kiểm soát tốc độ và vị trí tuyệt vời cùng hiệu suất năng lượng cao.
- Actuator Thủy lực (Hydraulic Actuators): Sử dụng chất lỏng nén để tạo ra lực và mô-men xoắn cực lớn. Loại này thích hợp cho các ứng dụng tải trọng nặng và môi trường khắc nghiệt.
- Actuator Khí nén (Pneumatic Actuators): Vận hành bằng khí nén, cung cấp tốc độ cao và chi phí thấp, mặc dù độ chính xác vị trí thường thấp hơn.

1.2. Bộ điều khiển động cơ (Motor Driver) là gì?
Bộ điều khiển động cơ là một mạch hoặc thiết bị điện tử chuyên dụng được thiết kế để cấp nguồn và quản lý hoạt động của động cơ điện. Vai trò cơ bản của Driver giải quyết sự khác biệt về công suất giữa tín hiệu điều khiển logic và yêu cầu vận hành của động cơ.
- Khuếch đại tín hiệu: Driver nhận tín hiệu logic điện áp thấp (thường là 5V/3.3V) từ Vi điều khiển. Driver sau đó chuyển đổi tín hiệu này thành dòng điện và điện áp cao hơn để cấp cho động cơ.
- Điều khiển chiều quay: Đối với động cơ DC, Driver thực hiện việc đảo cực điện áp thông qua mạch Cầu H (H-Bridge), cho phép Actuator tiến hoặc lùi.
- Điều chỉnh tốc độ và Mô-men xoắn: Driver sử dụng kỹ thuật Điều chế độ rộng xung (PWM) để thay đổi điện áp hiệu dụng cấp cho động cơ, từ đó kiểm soát tốc độ và mô-men xoắn.
- Bảo vệ mạch điều khiển: Driver đóng vai trò như một lớp cách ly điện (Isolation) giữa động cơ (nguồn nhiễu và dòng lớn) và mạch logic tinh vi, ngăn ngừa sự cố hỏng hóc do xung nhiễu hoặc dòng ngược.
2. Phân Loại Motor Driver Phổ Biến Theo Loại Actuator
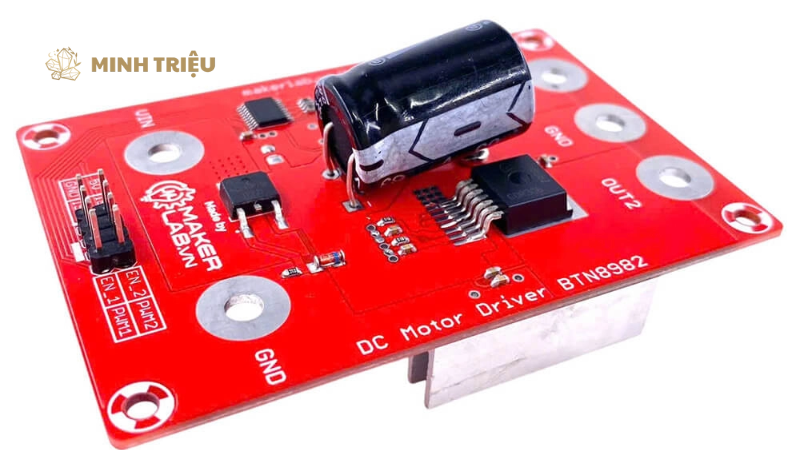
2.1. Driver cho Động cơ DC (DC Motor Driver)
Actuator sử dụng động cơ DC thường áp dụng cấu trúc Driver đơn giản. Mạch Cầu H (H-Bridge) là nền tảng của hầu hết các Driver DC.
Mạch Cầu H cho phép dòng điện chạy qua động cơ theo hai chiều khác nhau, tạo điều kiện cho việc thay đổi chiều quay của Actuator tuyến tính hoặc Actuator van cơ bản. PWM được sử dụng để điều chỉnh tốc độ bằng cách thay đổi chu kỳ nhiệm vụ (Duty Cycle) của xung điện áp cấp cho động cơ. Driver DC thích hợp cho các Actuator chỉ yêu cầu điều khiển tốc độ và hướng đơn giản, không cần độ chính xác vị trí cao.
2.2. Driver cho Động cơ Stepper (Stepper Motor Driver)
Động cơ Stepper yêu cầu Driver phức tạp hơn, vì Actuator này hoạt động dựa trên các xung điện tử chính xác. Driver Stepper có nhiệm vụ cung cấp các xung theo trình tự chính xác tới các cuộn dây của động cơ.
- Full Step (Bước toàn phần): Cung cấp mô-men xoắn tối đa nhưng Actuator di chuyển thô và dễ gây rung.
- Half Step (Nửa bước): Cải thiện độ phân giải bằng cách xen kẽ giữa các cuộn dây.
- Micro Stepping (Vi bước): Là kỹ thuật tiên tiến nhất, cho phép Driver chia nhỏ một bước cơ học thành hàng trăm vi bước. Điều này giảm đáng kể độ rung và tiếng ồn, tăng độ chính xác vị trí của Actuator trong các máy CNC mini hay thiết bị quang học.
2.3. Driver cho Động cơ Servo (Servo Motor Driver)
Hệ thống Servo Actuator là tiêu chuẩn vàng cho các ứng dụng đòi hỏi kiểm soát vị trí và mô-men xoắn tuyệt đối. Servo Driver là bộ não của hệ thống điều khiển vòng kín (Closed-loop control).
Driver Servo liên tục nhận tín hiệu phản hồi từ Encoder gắn trên trục động cơ. Thông tin phản hồi này cho phép Driver tính toán và điều chỉnh dòng điện cấp để Actuator đạt được vị trí và tốc độ mong muốn một cách chính xác. Servo Driver tích hợp các thuật toán điều khiển phức tạp như PID (Proportional–Integral–Derivative). Driver loại này rất cần thiết cho Actuator trong cánh tay robot, máy lắp ráp và hệ thống đóng gói tốc độ cao.
2.4. Biến tần (VFD/AC Drive) – Driver cho Động cơ AC
Đối với Actuator sử dụng động cơ AC 3 pha công suất lớn, Biến tần (VFD – Variable Frequency Drive) là Driver được lựa chọn. Biến tần điều khiển tốc độ của động cơ bằng cách thay đổi tần số cấp điện (Control).
Công nghệ VFD mang lại lợi ích kép: kiểm soát tốc độ Actuator linh hoạt và tiết kiệm năng lượng đáng kể. VFD thường được sử dụng để điều khiển các Actuator công suất lớn như bơm công nghiệp, quạt thông gió, hoặc Actuator van chặn lớn trong các ngành công nghiệp nặng.
| Loại Motor Driver | Loại Actuator Hỗ trợ Chính | Nguyên tắc Điều khiển Cốt lõi | Lợi ích Chính |
|---|---|---|---|
| DC Driver (H-Bridge) | Actuator Tuyến tính, Actuator Van cơ bản | Điều chế độ rộng xung (PWM) và Đảo cực | Chi phí thấp, Dễ dàng tích hợp |
| Stepper Driver | Actuator vị trí chính xác (CNC, Quang học) | Cung cấp xung điện theo trình tự, Micro Stepping | Độ chính xác vị trí cao, Mô-men xoắn giữ lớn |
| Servo Driver | Actuator Robot, Máy móc tốc độ cao | Vòng kín (Closed-loop), Phản hồi Encoder, PID | Kiểm soát tuyệt đối Vị trí, Tốc độ, Mô-men xoắn |
| VFD/AC Drive | Actuator công suất lớn (Bơm, Quạt) | Điều khiển Tần số (V/f Control) | Tiết kiệm năng lượng, Hoạt động bền bỉ |
3. Tiêu Chí Lựa Chọn Motor Driver Chuẩn Xác Cho Actuator
3.1. Thông số Kỹ thuật của Actuator/Động cơ
Actuator xác định yêu cầu đầu ra của Driver. Các thông số quan trọng phải được so sánh với khả năng cấp nguồn của Driver:
- Điện áp hoạt động (Voltage): Driver phải cung cấp điện áp phù hợp với định mức của Actuator (ví dụ: 12V, 24V DC hoặc 220V, 380V AC). Sự không khớp điện áp sẽ dẫn đến hư hỏng Actuator hoặc hoạt động kém hiệu quả.
- Dòng điện tối đa (Max Current): Đây là tiêu chí quan trọng nhất. Driver cần có khả năng chịu được dòng tải định mức và, quan trọng hơn, dòng khởi động hoặc dòng đỉnh (Peak Current). Thông số dòng điện của Driver nên được chọn dư dả hơn (ít nhất 20%) so với Actuator để tránh quá tải nhiệt.
- Công suất (Power): Công suất đầu ra tối đa của Driver phải lớn hơn công suất yêu cầu của Actuator.
3.2. Phương thức Điều khiển
Giao thức điều khiển quyết định cách Driver tương tác với hệ thống điều khiển cấp cao hơn (PLC, PC hoặc SCADA).
| Giao thức | Đặc điểm | Ưu điểm khi điều khiển Actuator |
|---|---|---|
| Analog (0-10V / 4-20mA) | Tín hiệu tương tự, đơn giản | Điều chỉnh tốc độ (speed) hoặc mô-men xoắn (torque) tuyến tính. |
| Digital (PWM/DIR) | Tín hiệu xung kỹ thuật số | Điều khiển tốc độ chính xác (PWM) và Chiều quay (DIR). |
| Fieldbus (Modbus, Profibus) | Giao thức truyền thông nối tiếp công nghiệp | Truyền nhiều thông tin trạng thái (vị trí, lỗi) và lệnh Actuator qua một cặp dây. |
| Industrial Ethernet (EtherCAT, Profinet) | Tốc độ cao, đồng bộ hóa thời gian thực | Đồng bộ hóa chuyển động của nhiều Actuator (Multi-axis synchronization) trong Robot |
Actuator đòi hỏi độ chính xác cao thường yêu cầu khả năng điều khiển vòng kín (Closed-loop). Servo Driver thực hiện điều này bằng cách xử lý tín hiệu từ Encoder. Ngược lại, Actuator không yêu cầu kiểm soát vị trí chính xác có thể sử dụng Driver vòng hở (Open-loop), như đa số các Driver Stepper hoặc DC cơ bản.
3.3. Tính năng Bảo vệ và An toàn
Tính năng bảo vệ đảm bảo tuổi thọ cho cả Driver và Actuator.
- Bảo vệ quá dòng (Overcurrent Protection): Ngắt nguồn điện ngay lập tức khi dòng tải vượt quá giới hạn an toàn, bảo vệ các linh kiện bán dẫn (như IGBT/MOSFET) bên trong Driver.
- Bảo vệ quá nhiệt (Overtemperature Protection): Giám sát nhiệt độ của Driver và giảm dòng điện hoặc ngắt Actuator khi quá nóng, ngăn chặn sự hỏng hóc vĩnh viễn.
- Bảo vệ ngắn mạch (Short Circuit Protection): Phát hiện và cách ly Actuator khỏi nguồn điện khi xảy ra ngắn mạch ở phía động cơ.
- Khả năng cách ly điện (Electrical Isolation): Cung cấp sự ngăn cách về điện giữa mạch điều khiển logic và mạch công suất, chống nhiễu điện từ và các xung điện áp cao.
4. Ứng Dụng Thực Tế của Motor Driver trong Actuator Công nghiệp
4.1. Ứng dụng Robot và Cánh tay Gắp
Trong lĩnh vực Robot Công nghiệp, Servo Driver là lựa chọn độc tôn. Cánh tay robot đòi hỏi Actuator có khả năng:
- Đạt tốc độ cao: Servo Driver cung cấp phản ứng tức thời để Actuator có thể thay đổi hướng và tốc độ liên tục.
- Kiểm soát mô-men xoắn chính xác: Driver đảm bảo lực gắp vật liệu được kiểm soát để tránh làm hỏng sản phẩm.
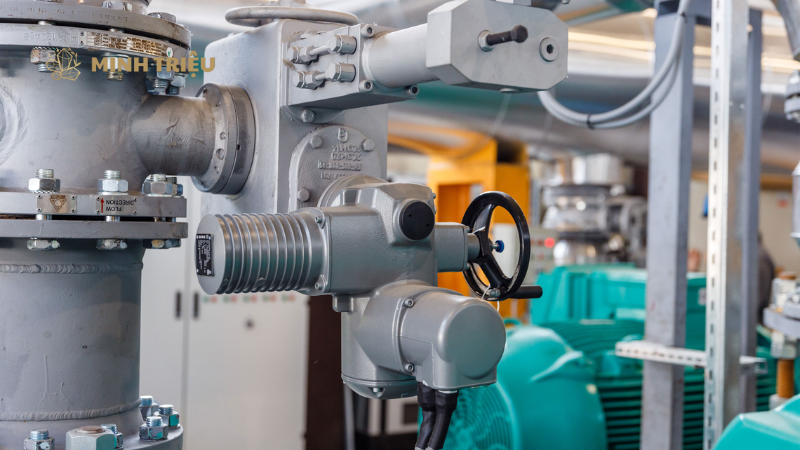
4.2. Hệ thống Van Điều khiển Chính xác
Các Actuator van trong ngành hóa chất hay thực phẩm cần độ chính xác vị trí cực cao để định lượng vật liệu. Stepper Driver hoặc Servo Driver được sử dụng để điều khiển Actuator van. Driver Stepper cho phép kỹ sư chia hành trình mở/đóng van thành hàng ngàn bước nhỏ (Micro Stepping), đảm bảo Actuator thực hiện việc định lượng với sai số gần như bằng không.
4.3. Thiết bị Đóng gói và Phân loại
Tốc độ và sự đồng bộ là yếu tố sống còn trong các dây chuyền đóng gói hiện đại. Hệ thống này thường sử dụng nhiều Actuator hoạt động đồng thời:
- Actuator băng tải được điều khiển bởi VFD để duy trì tốc độ di chuyển ổn định.
- Actuator định vị và cắt sản phẩm được điều khiển bởi Servo Driver, đảm bảo sự đồng bộ thời gian thực giữa các trục thông qua giao thức như EtherCAT.
4.4. Actuator trong Công nghiệp Năng lượng
Actuator trong các nhà máy điện thường là van chặn lớn hoặc cơ cấu điều tiết tua-bin, yêu cầu công suất cực lớn. Motor Driver AC (Biến tần) đảm nhận nhiệm vụ điều khiển. Driver loại này phải có khả năng chịu tải nặng và hoạt động ổn định trong môi trường nhiệt độ cao, cung cấp khả năng khởi động mềm để bảo vệ động cơ Actuator khỏi hư hỏng cơ học.
| Lĩnh vực Ứng dụng | Mục tiêu Điều khiển Chính | Loại Driver Tối ưu | Giao thức Điều khiển Thường dùng |
|---|---|---|---|
| Robot/Tay máy Gắp | Kiểm soát vị trí và Mô-men xoắn tức thì | Servo Driver | EtherCAT, Profinet, Modbus/TCP |
| Định lượng Hóa chất | Độ chính xác vị trí/Độ phân giải cao | Stepper Driver, Servo Driver | Xung/Chiều (PUL/DIR), Modbus RTU |
| Băng tải Chính | Tốc độ ổn định và Khởi động mềm | Biến tần (VFD) | Analog 0-10V, Fieldbus |
| Actuator Tuyến tính cơ bản | Điều khiển Tiến/Lùi và Tốc độ đơn giản | DC Driver (H-Bridge) | PWM, Tín hiệu ON/OFF |
5. Kết Luận
Bộ điều khiển động cơ (Motor Driver) xác lập vị thế không thể thay thế trong mọi hệ thống Actuator điện. Nó không chỉ đóng vai trò là một bộ khuếch đại dòng điện đơn thuần, mà còn là thành phần trung tâm thực hiện các thuật toán điều khiển tinh vi (như vòng kín và Micro Stepping). Motor Driver chính là yếu tố quyết định Actuator có thể hoạt động hiệu quả, an toàn và đạt được độ chính xác mong muốn hay không.