
Robot công nghiệp
Thuật toán điều khiển vị trí và quỹ đạo nền tảng cho cánh tay Robot

Cập nhật lần cuối 18 Tháng 6, 2025 bởi diu
Cánh tay robot công nghiệp là trụ cột của tự động hóa, giúp nâng cao hiệu quả và chất lượng sản xuất nhờ khả năng thực hiện các tác vụ phức tạp với độ chính xác cao. Cốt lõi của hiệu suất này nằm ở các thuật toán điều khiển vị trí và quỹ đạo, giúp robot di chuyển mượt mà, kiểm soát tốc độ và gia tốc tối ưu. Bài viết sẽ phân tích các thuật toán phổ biến, thách thức trong điều khiển, giải pháp cải tiến và ứng dụng thực tế, từ đó hỗ trợ kỹ sư và nhà quản lý tối ưu quy trình sản xuất.
1. Hiểu Rõ Thuật Toán Điều Khiển Vị Trí và Quỹ Đạo Là Gì?
1.1. Khái Niệm Cơ Bản
Điều khiển vị trí nghĩa là đảm bảo cánh tay robot đạt được một điểm không gian xác định một cách chính xác, trong khi điều khiển quỹ đạo liên quan đến việc hướng dẫn cánh tay robot di chuyển theo một đường cong hoặc đường thẳng được thiết lập trước, thường bao gồm các tham số về vận tốc và gia tốc mong muốn.\
Hai khái niệm này có mối quan hệ chặt chẽ và không thể tách rời trong mọi ứng dụng robot công nghiệp, bởi vì để một robot thực hiện một tác vụ, nó cần không chỉ đến đúng vị trí mà còn phải di chuyển đến đó theo một cách được kiểm soát. Cụ thể, điều khiển vị trí thiết lập điểm đích, còn điều khiển quỹ đạo định nghĩa con đường đạt đến điểm đích đó, đảm bảo sự mượt mà và an toàn trong chuyển động.
1.2. Tầm Quan Trọng Của Dữ Liệu Phản Hồi
Dữ liệu phản hồi đóng vai trò then chốt trong việc điều khiển cánh tay robot, cho phép hệ thống biết được vị trí và vận tốc hiện tại của robot thông qua các thiết bị như bộ mã hóa (encoder) và bộ phân giải (resolver). Các cảm biến này cung cấp thông tin liên tục về trạng thái thực tế của các khớp robot, giúp hệ thống so sánh với trạng thái mong muốn và tính toán sai số.
Đây là nền tảng của cơ chế vòng lặp điều khiển (control loop), nơi dữ liệu phản hồi được sử dụng để điều chỉnh tín hiệu điều khiển, giảm thiểu sai số và đảm bảo robot di chuyển đúng theo kế hoạch.
1.3. Các Tham Số Ảnh Hưởng
Nhiều tham số ảnh hưởng đến hiệu suất của thuật toán điều khiển, bao gồm quán tính của các khớp và khối lượng tải, ma sát trong hệ thống cơ khí, trọng lực tác động lên các thành phần của cánh tay robot, tải trọng mà robot đang mang, và độ cứng khớp nối của cấu trúc cơ khí.
Mỗi yếu tố này đều có thể gây ra sai lệch trong chuyển động của robot và cần được tính toán hoặc bù trừ bởi thuật toán điều khiển để duy trì độ chính xác. Việc hiểu rõ và định lượng được những tham số này là rất quan trọng để thiết kế và tinh chỉnh các thuật toán điều khiển hiệu quả.
2. Các Thuật Toán Điều Khiển Cánh Tay Robot Phổ Biến Cho Từng Ứng Dụng
2.1. Thuật Toán Điều Khiển Vị Trí
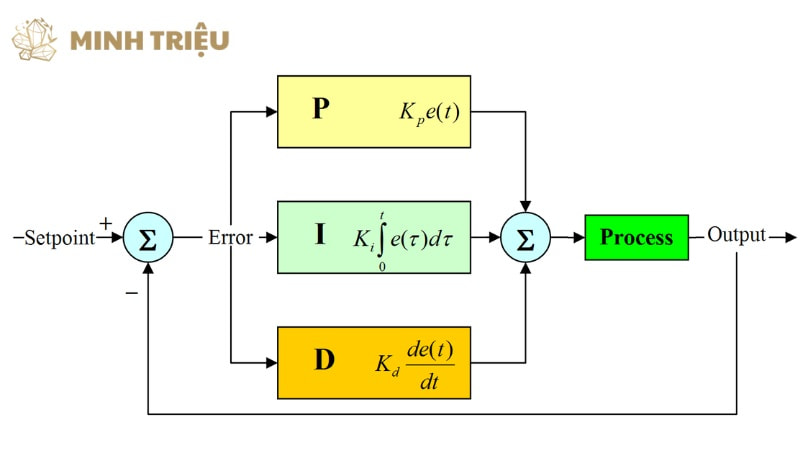
2.1.1. PID (Proportional-Integral-Derivative)
Bộ điều khiển PID (Proportional-Integral-Derivative) là một trong những thuật toán điều khiển hồi tiếp phổ biến nhất, hoạt động dựa trên ba thành phần chính: tỷ lệ (P) phản ứng với sai số hiện tại, tích phân (I) phản ứng với tổng sai số trong quá khứ, và vi phân (D) phản ứng với tốc độ thay đổi của sai số. Nguyên lý hoạt động của PID là tính toán tín hiệu điều khiển bằng cách tổng hợp ba thành phần này để giảm thiểu sai số giữa giá trị mong muốn và giá trị thực tế của hệ thống. Thuật toán này có ưu điểm nổi bật là sự đơn giản và dễ hiệu chỉnh, cho phép người dùng điều chỉnh các tham số Kp, Ki, Kd một cách tương đối trực quan để đạt được hiệu suất mong muốn.
Tuy nhiên, PID cũng có nhược điểm là khó tối ưu hóa cho các hệ thống phi tuyến tính hoặc có độ phức tạp cao, và hiệu suất của nó phụ thuộc nhiều vào việc lựa chọn đúng các tham số. Trong robot công nghiệp, PID thường được sử dụng để điều khiển động cơ khớp, đảm bảo mỗi khớp quay đến vị trí mong muốn một cách nhanh chóng và ổn định, đây là nền tảng cho mọi chuyển động của cánh tay robot.
2.1.2. Điều Khiển Chế Độ Trượt (Sliding Mode Control – SMC)
Điều khiển chế độ trượt (Sliding Mode Control – SMC) là một phương pháp điều khiển mạnh mẽ và ổn định, đặc biệt hiệu quả trong việc xử lý các hệ thống có nhiễu hoặc có sự không chắc chắn về mô hình. Nguyên lý của SMC là đẩy trạng thái của hệ thống về một “mặt trượt” được thiết kế trước và duy trì trạng thái đó trên mặt trượt, đảm bảo hệ thống hội tụ về điểm mong muốn bất chấp các nhiễu loạn bên ngoài.
Ưu điểm chính của SMC là tính chắc chắn cao và ít nhạy cảm với sự thay đổi tham số hoặc nhiễu loạn của hệ thống. Tuy nhiên, nhược điểm nổi bật của SMC là hiện tượng “chattering”, gây ra sự dao động nhanh của tín hiệu điều khiển, có thể dẫn đến mòn cơ khí và gây nhiễu cho hệ thống.
2.1.3. Điều Khiển Phản Hồi Trạng Thái (State-Space Control)
Điều khiển phản hồi trạng thái (State-Space Control) là một phương pháp điều khiển hiện đại, sử dụng mô hình trạng thái của hệ thống để thiết kế bộ điều khiển. Khái niệm cơ bản của phương pháp này là biểu diễn hệ thống dưới dạng một tập hợp các phương trình trạng thái, cho phép bộ điều khiển tác động lên tất cả các biến trạng thái của hệ thống thay vì chỉ dựa vào tín hiệu đầu ra.
Ưu điểm của điều khiển phản hồi trạng thái là khả năng tối ưu hóa hệ thống phức tạp, đặc biệt là các hệ thống đa biến, giúp đạt được hiệu suất điều khiển vượt trội so với các phương pháp truyền thống.
2.2. Thuật Toán Điều Khiển Quỹ Đạo
2.2.1. Phương Pháp Quy Hoạch Quỹ Đạo (Trajectory Planning)
Phương pháp quy hoạch quỹ đạo (Trajectory Planning) là quá trình tạo ra một chuỗi các vị trí, vận tốc và gia tốc mong muốn mà cánh tay robot phải tuân theo để di chuyển từ điểm bắt đầu đến điểm kết thúc. Quá trình này bao gồm việc tạo ra các điểm trung gian (waypoints) và sử dụng các hàm nội suy để tạo ra một đường đi mượt mà và liên tục.
Các hàm nội suy phổ biến bao gồm polynomial (đa thức), spline, và NURBS (Non-Uniform Rational B-Splines), mỗi loại có ưu điểm riêng trong việc tạo ra quỹ đạo với các đặc tính khác nhau về độ mượt và khả năng kiểm soát. Mục tiêu của quy hoạch quỹ đạo là tối ưu hóa các yếu tố như thời gian thực hiện tác vụ, năng lượng tiêu thụ và quan trọng nhất là tránh va chạm với môi trường hoặc các vật thể khác, đảm bảo an toàn và hiệu quả cho hoạt động của robot.
2.2.2. Điều Khiển Dựa Trên Mô Hình (Model-Based Control)
Điều khiển dựa trên mô hình (Model-Based Control) sử dụng các mô hình toán học chi tiết về động học ngược và động học thuận của robot để tính toán các lực hoặc mô men cần thiết tại mỗi khớp để thực hiện quỹ đạo mong muốn. Phương pháp này tận dụng kiến thức về cấu trúc và các tham số vật lý của robot để đạt được độ chính xác cao hơn, đặc biệt trong các tác vụ đòi hỏi sự tương tác với môi trường.
Ví dụ điển hình là điều khiển mô men khớp hoặc điều khiển lực cho các tác vụ lắp ráp tinh vi, nơi robot cần cảm nhận và điều chỉnh lực tương tác với vật thể để tránh hư hỏng.

2.2.3. Điều Khiển Thích Nghi (Adaptive Control)
Điều khiển thích nghi (Adaptive Control) là một loại thuật toán cho phép hệ thống tự động điều chỉnh các tham số điều khiển của mình để duy trì hiệu suất mong muốn khi môi trường hoạt động hoặc các đặc tính của tải trọng thay đổi. Khả năng tự điều chỉnh này là rất quan trọng đối với cánh tay robot công nghiệp, nơi các điều kiện vận hành có thể biến đổi liên tục.
Ví dụ: nếu robot nhặt một vật có khối lượng khác so với dự kiến, bộ điều khiển thích nghi có thể tự động điều chỉnh độ lợi để đảm bảo chuyển động vẫn mượt mà và chính xác, không bị ảnh hưởng bởi sự thay đổi đột ngột này.
3. Tối Ưu Hóa Hiệu Suất Thách Thức và Giải Pháp Trong Thực Tế
3.1. Các Thách Thức Thường Gặp
Trong thực tế, việc tối ưu hóa hiệu suất của cánh tay robot thường đối mặt với nhiều thách thức đáng kể. Sai số do các yếu tố cơ khí như độ rơ (backlash) tại các khớp nối hoặc sự biến dạng của cấu trúc robot dưới tải trọng có thể làm giảm độ chính xác. Nhiễu từ môi trường như rung động từ các máy móc khác hoặc nhiễu điện từ từ các thiết bị công nghiệp có thể làm sai lệch tín hiệu cảm biến và ảnh hưởng đến hoạt động của bộ điều khiển.
Thay đổi tải trọng và đặc tính động học của robot trong quá trình vận hành cũng là một thách thức, đòi hỏi thuật toán phải có khả năng thích nghi. Cuối cùng, tính toán phức tạp và yêu cầu thời gian thực (real-time) cho việc xử lý dữ liệu và đưa ra quyết định điều khiển đặt ra áp lực lớn lên phần cứng và phần mềm của hệ thống.
3.2. Giải Pháp và Kỹ Thuật Nâng Cao
Để giải quyết các thách thức trên, nhiều giải pháp và kỹ thuật nâng cao đã được phát triển. Hiệu chỉnh tham số (Tuning) PID nâng cao thông qua các phương pháp như kỹ thuật Ziegler-Nichols cải tiến hoặc sử dụng các thuật toán tối ưu hóa dựa trên trí tuệ nhân tạo (AI) giúp tìm ra bộ tham số PID tối ưu hơn. Sử dụng cảm biến lực/mô men cho phép robot thực hiện điều khiển lực/mô men, tăng cường độ chính xác trong các tác vụ tiếp xúc như lắp ráp hoặc chà nhám.
Tích hợp AI/Machine Learning đang mở ra những khả năng mới, với học tăng cường (Reinforcement Learning) giúp robot tự học cách tối ưu hóa hành vi điều khiển thông qua thử và sai, và mạng nơ-ron được sử dụng để mô hình hóa các đặc tính phức tạp của robot và môi trường. Điều khiển thích nghi và dự báo mang lại khả năng tự học và điều chỉnh liên tục để thích nghi với các điều kiện thay đổi.
Cuối cùng, tối ưu hóa phần cứng thông qua việc sử dụng động cơ servo chính xác và hộp số ít độ rơ là nền tảng vật lý không thể thiếu để đạt được độ chính xác cao nhất.
4. Ứng Dụng Thực Tế Của Thuật Toán Điều Khiển Trong Công Nghiệp
Các thuật toán điều khiển vị trí và quỹ đạo là yếu tố then chốt cho hàng loạt ứng dụng của cánh tay robot trong sản xuất công nghiệp, mang lại hiệu quả và chất lượng vượt trội.
- Hàn tự động: Robot hàn tự động dựa vào các thuật toán này để đảm bảo đường hàn chính xác, đều đặn và chất lượng cao. Thuật toán quỹ đạo giúp robot di chuyển mượt mà theo đường hàn phức tạp, trong khi điều khiển vị trí giữ mỏ hàn ở đúng khoảng cách và góc độ.
- Sơn/Phun sơn: Trong quá trình sơn, robot sử dụng điều khiển quỹ đạo để tạo ra các lớp sơn đồng đều và mượt mà trên các bề mặt phức tạp, giảm thiểu lãng phí và tăng tính thẩm mỹ của sản phẩm.
- Lắp ráp linh kiện: Các tác vụ lắp ráp yêu cầu độ chính xác cực cao trong việc định vị và thao tác các linh kiện nhỏ. Các thuật toán điều khiển vị trí đảm bảo robot đặt đúng chi tiết vào đúng chỗ, trong khi điều khiển lực giúp robot cảm nhận và tránh gây hỏng hóc.
- Gia công CNC: Robot thực hiện các tác vụ gia công như cắt, phay, khoan với độ chính xác cao nhờ các thuật toán điều khiển quỹ đạo chi tiết, đảm bảo đường cắt chính xác và bề mặt gia công chất lượng.
- Vận chuyển và xếp dỡ hàng hóa: Trong các kho hàng tự động, robot điều khiển vị trí và quỹ đạo để di chuyển hàng hóa nhanh chóng, chính xác và an toàn từ điểm này đến điểm khác, tối ưu hóa quy trình logistics.
- Kiểm tra chất lượng: Robot được sử dụng để di chuyển các cảm biến theo quỹ đạo xác định nhằm quét và phân tích bề mặt sản phẩm, phát hiện lỗi và đảm bảo chất lượng.
5. Kết Luận
Tóm lại, thuật toán điều khiển vị trí và quỹ đạo không chỉ là yếu tố then chốt mà còn là trái tim của mọi cánh tay robot công nghiệp hiện đại, định hình trực tiếp hiệu suất, độ chính xác và tính an toàn của chúng. Từ những bộ điều khiển PID cơ bản đến các phương pháp tiên tiến như điều khiển chế độ trượt hay điều khiển thích nghi, sự đa dạng của các thuật toán này cho phép ứng dụng robot vào hàng loạt tác vụ phức tạp trong sản xuất công nghiệp, từ hàn tự động đến lắp ráp chính xác.
Tương lai của công nghệ điều khiển robot đang hướng tới sự tích hợp mạnh mẽ của AI, Machine Learning và các giải pháp điện toán biên, hứa hẹn những cánh tay robot tự động hơn, thông minh hơn và có khả năng thích nghi vượt trội trong môi trường sản xuất công nghiệp 4.0. Đối với các doanh nghiệp và kỹ sư, việc đầu tư vào nghiên cứu và phát triển công nghệ điều khiển là vô cùng cần thiết để duy trì lợi thế cạnh tranh.
Điều này bao gồm việc lựa chọn giải pháp điều khiển phù hợp nhất với từng ứng dụng cụ thể và thường xuyên cập nhật kiến thức về những tiến bộ công nghệ mới. Việc nắm vững những nguyên lý này sẽ giúp tối ưu hóa quy trình sản xuất, nâng cao chất lượng sản phẩm và khai thác tối đa tiềm năng của hệ thống robot tự động hóa.