
Robot công nghiệp
Hàng Rào An Toàn và Vùng Làm Việc Của Robot: Bảo Vệ Tối Ưu Cho Cánh Tay Robot Trong Sản Xuất Công Nghiệp

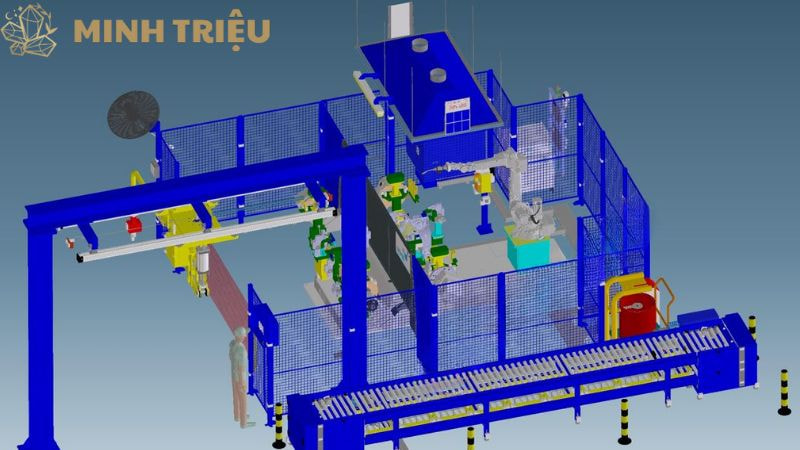
Sự phổ biến ngày càng tăng của cánh tay robot trong sản xuất công nghiệp đã cách mạng hóa quy trình sản xuất, mang lại hiệu quả vượt trội và chất lượng sản phẩm cao hơn. Tuy nhiên, việc tích hợp các hệ thống robot mạnh mẽ này vào môi trường nhà máy cũng tiềm ẩn những rủi ro đáng kể nếu không được quản lý cẩn thận. Nguy cơ va chạm, kẹt, hoặc tiếp xúc với các bộ phận chuyển động nhanh là mối lo ngại lớn, có thể dẫn đến tai nạn lao động nghiêm trọng và thiệt hại tài sản. Do đó, việc kiểm soát và bảo vệ vùng làm việc của robot thông qua các hàng rào an toàn là yếu tố sống còn để đảm bảo một môi trường sản xuất an toàn và hiệu quả.
Bài viết này sẽ đi sâu vào khái niệm về vùng làm việc của robot, phân tích tầm quan trọng của các hàng rào an toàn, đồng thời khám phá các loại hàng rào an toàn và giải pháp bảo vệ khác nhau. Chúng ta cũng sẽ tìm hiểu về cách thiết kế vùng làm việc an toàn theo các tiêu chuẩn quốc tế và những thách thức cùng giải pháp trong việc triển khai an toàn robot, nhằm trang bị kiến thức toàn diện cho việc ứng dụng cánh tay robot một cách tối ưu và an toàn nhất.
1. Khái Niệm Về Vùng Làm Việc Của Robot
Để đảm bảo an toàn tối đa khi vận hành cánh tay robot trong sản xuất công nghiệp, việc hiểu rõ và xác định chính xác vùng làm việc của robot là bước đầu tiên và cơ bản. Các vùng này giúp phân định rõ ràng các khu vực an toàn và nguy hiểm trong một hệ thống robot.
1.1. Vùng hoạt động robot (Robot’s operating zone)
Vùng hoạt động robot được định nghĩa là toàn bộ không gian mà bất kỳ bộ phận nào của robot, bao gồm cả các dụng cụ và phôi mà nó đang mang, có thể tiếp cận được. Việc xác định chính xác vùng này là cực kỳ quan trọng, bởi vì nó đặt ra ranh giới vật lý cho phạm vi hoạt động tiềm năng của robot. Nếu không được kiểm soát đúng cách, bất kỳ ai vô tình đi vào vùng này đều có nguy cơ va chạm với robot hoặc các vật liệu mà robot đang thao tác.
1.2. Vùng nguy hiểm (Hazard zone)
Vùng nguy hiểm là khu vực cụ thể trong vùng hoạt động robot nơi con người có thể tiếp xúc với các bộ phận chuyển động của robot hoặc các vật liệu, dụng cụ mà robot đang xử lý, dẫn đến nguy hiểm tiềm tàng. Trong vùng này, các mối nguy hiểm điển hình bao gồm va chạm trực tiếp với cánh tay robot, bị kẹt giữa robot và vật cố định, bị nghiền nát, hoặc bị văng các vật liệu do robot làm rơi hoặc thao tác. Phân tích cẩn thận các kịch bản nguy hiểm trong vùng này là cơ sở để thiết kế các biện pháp an toàn.

1.3. Vùng bảo vệ (Safeguarded zone)
Vùng bảo vệ là khu vực được bao bọc và bảo vệ bởi các hàng rào an toàn vật lý hoặc phi vật lý nhằm ngăn chặn sự tiếp cận của con người vào vùng nguy hiểm của robot. Mối quan hệ giữa vùng hoạt động, vùng nguy hiểm và vùng bảo vệ là một yếu tố then chốt trong thiết kế an toàn: vùng bảo vệ phải bao trùm toàn bộ vùng nguy hiểm, và thường lớn hơn vùng hoạt động robot một khoảng cách an toàn nhất định để tính đến thời gian dừng của robot và sự di chuyển của con người.
2. Tầm Quan Trọng Của Hàng Rào An Toàn Trong Hệ Thống Robot
Hàng rào an toàn đóng vai trò thiết yếu, là lớp phòng thủ vật lý hoặc phi vật lý đầu tiên và quan trọng nhất để bảo vệ con người khỏi những mối nguy hiểm tiềm tàng do cánh tay robot trong sản xuất công nghiệp gây ra.
2.1. Ngăn chặn tiếp cận vùng nguy hiểm
Hàng rào an toàn là biện pháp hiệu quả nhất để ngăn chặn sự tiếp cận trái phép hoặc vô tình của con người vào vùng nguy hiểm của robot. Chúng tạo ra một rào cản vật lý hoặc một trường cảm biến, đảm bảo rằng không ai có thể va chạm trực tiếp với cánh tay robot hoặc các thiết bị ngoại vi đang hoạt động. Hơn nữa, chúng còn ngăn ngừa việc tiếp xúc với các vật liệu nguy hiểm (như vật liệu nóng, sắc nhọn, hoặc hóa chất) mà robot đang xử lý, bảo vệ người lao động khỏi các rủi ro từ môi trường làm việc.
2.2. Giảm thiểu rủi ro tai nạn lao động
Bằng cách cô lập vùng làm việc của robot, hàng rào an toàn trực tiếp giảm thiểu rủi ro tai nạn lao động. Chúng tạo ra một rào cản vật lý đáng tin cậy, buộc con người phải tuân thủ các quy định về khoảng cách an toàn. Điều này cũng giúp giảm thiểu sự can thiệp không cần thiết của con người vào khu vực robot đang hoạt động, nơi mà sai sót của con người thường là nguyên nhân chính gây ra tai nạn.
2.3. Tuân thủ các tiêu chuẩn an toàn (ISO 10218)
Việc thiết lập hàng rào an toàn là một yêu cầu cơ bản để tuân thủ các tiêu chuẩn an toàn quốc tế quan trọng như ISO 10218-2 (Yêu cầu an toàn cho hệ thống và tích hợp robot). Tuân thủ các tiêu chuẩn này không chỉ đảm bảo hệ thống robot đáp ứng các yêu cầu pháp luật và quy định về an toàn lao động mà còn giúp doanh nghiệp tránh được các khoản phạt nặng, giảm thiểu trách nhiệm pháp lý, và nâng cao uy tín trong ngành.
2.4. Tăng cường lòng tin và hiệu suất làm việc
Khi người lao động biết rằng họ được bảo vệ bởi các hàng rào an toàn đáng tin cậy, lòng tin của họ vào hệ thống robot sẽ tăng lên. Điều này tạo ra một môi trường làm việc an toàn hơn, giúp giảm căng thẳng và lo lắng cho nhân viên. Sự yên tâm này gián tiếp dẫn đến tăng cường hiệu suất làm việc, giảm thời gian ngừng hoạt động do sự cố an toàn, và thúc đẩy sự hợp tác hiệu quả giữa con người và máy móc.
3. Các Loại Hàng Rào An Toàn và Giải Pháp Bảo Vệ
Việc lựa chọn và triển khai các loại hàng rào an toàn phù hợp là một phần quan trọng trong việc thiết kế vùng làm việc an toàn của robot, đòi hỏi sự kết hợp giữa các giải pháp vật lý và phi vật lý để đạt được mức độ bảo vệ tối ưu.
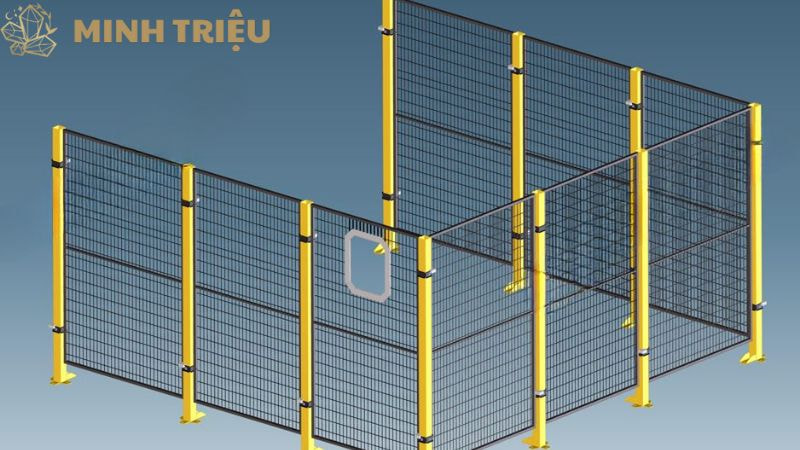
3.1. Hàng rào vật lý cố định (Fixed physical guards)
Hàng rào vật lý cố định là những cấu trúc không thể tháo rời hoặc mở ra mà không sử dụng dụng cụ, được thiết kế để bao bọc toàn bộ hoặc một phần vùng làm việc của robot. Các loại phổ biến bao gồm lưới thép, tấm chắn kim loại hoặc nhựa cứng, và hàng rào cố định bằng nhôm định hình.
- Ưu điểm: Chi phí thường thấp, độ tin cậy rất cao vì chúng tạo ra một rào cản vật lý chắc chắn, và tương đối dễ lắp đặt.
- Nhược điểm: Chúng giảm đáng kể tính linh hoạt trong quá trình sản xuất, gây khó khăn khi cần tiếp cận robot để bảo trì, lập trình hoặc thay đổi cấu hình.
3.2. Hàng rào vật lý di động và cổng an toàn (Movable physical guards & safety gates)
Hàng rào vật lý di động bao gồm các loại cửa hoặc cổng có thể mở/đóng để cho phép người vận hành hoặc kỹ thuật viên tiếp cận vùng làm việc của robot. Các ví dụ phổ biến là cổng trượt, cổng xoay, hoặc cửa hai cánh.
- Yêu cầu: Bắt buộc phải có khóa liên động an toàn. Thiết bị khóa liên động đảm bảo rằng cánh tay robot sẽ tự động dừng chuyển động nguy hiểm và không thể khởi động lại cho đến khi cổng được đóng hoàn toàn và khóa lại. Các loại cảm biến từ, cảm biến RFID thường được sử dụng để kiểm soát trạng thái của cổng.
3.3. Hàng rào phi vật lý (Non-physical guards) – Cảm biến an toàn
Hàng rào phi vật lý là các thiết bị điện tử tạo ra một vùng bảo vệ ảo, thường được sử dụng để tăng cường tính linh hoạt trong khi vẫn đảm bảo an toàn.
- Rèm sáng an toàn (Safety light curtains): Đây là các thiết bị phát ra các tia hồng ngoại vô hình, tạo thành một “bức màn” ánh sáng. Khi có bất kỳ vật thể nào (ví dụ: tay, chân, cơ thể người) cắt ngang các tia này, cảm biến sẽ gửi tín hiệu dừng khẩn cấp cho robot.
- Laser scanner an toàn (Safety laser scanners): Thiết bị này phát ra tia laser và quét một vùng 2D hoặc 3D xác định. Chúng có khả năng tạo ra các vùng bảo vệ linh hoạt với nhiều hình dạng và kích thước khác nhau. Khi có sự xâm nhập vào vùng này, robot sẽ dừng hoặc giảm tốc độ.
- Thảm áp lực an toàn (Safety mats): Các tấm thảm này được đặt trên sàn trong vùng làm việc của robot. Khi có trọng lượng (ví dụ: một người) tác động lên thảm, nó sẽ kích hoạt tín hiệu dừng cho robot.
- Cảm biến thị giác an toàn (Safety vision systems): Đây là công nghệ tiên tiến hơn, sử dụng camera và trí tuệ nhân tạo (AI) để phát hiện và theo dõi sự hiện diện, vị trí, và thậm chí là hướng di chuyển của con người trong vùng làm việc của robot. Chúng cho phép robot phản ứng một cách chủ động và linh hoạt hơn.
- Ưu điểm: Tăng cường đáng kể tính linh hoạt trong hoạt động, dễ dàng tích hợp vào các quy trình sản xuất thay đổi.
- Nhược điểm: Chi phí đầu tư thường cao hơn so với hàng rào vật lý, đòi hỏi việc cài đặt và bảo trì phức tạp hơn để đảm bảo độ tin cậy.
3.4. Nút dừng khẩn cấp (Emergency Stop – E-stop)
Nút dừng khẩn cấp (E-stop) là một thiết bị an toàn bắt buộc, có mặt ở nhiều vị trí chiến lược trong vùng làm việc của robot. Đây là một nút nhấn màu đỏ lớn, dễ tiếp cận, cho phép người vận hành hoặc bất kỳ ai trong khu vực nguy hiểm dừng khẩn cấp toàn bộ hệ thống robot ngay lập tức khi phát hiện tình huống nguy hiểm. Hệ thống E-stop phải được thiết kế để đảm bảo dừng an toàn và ngăn chặn việc khởi động lại ngoài ý muốn.
| Loại Hàng Rào An Toàn | Mô Tả Ngắn Gọn | Ưu Điểm Chính | Nhược Điểm Chính |
|---|---|---|---|
| Hàng rào vật lý cố định | Lưới thép, tấm chắn kim loại cố định. | Chi phí thấp, độ tin cậy cao, dễ lắp đặt. | Giảm linh hoạt, khó tiếp cận. |
| Hàng rào vật lý di động | Cổng trượt/xoay có khóa liên động. | Cho phép tiếp cận có kiểm soát. | Cần khóa liên động, vẫn giảm linh hoạt. |
| Rèm sáng an toàn | Các tia hồng ngoại vô hình. | Linh hoạt hơn, không cản trở vật lý. | Chi phí cao hơn, nhạy cảm với bụi bẩn. |
| Laser scanner an toàn | Quét vùng 2D/3D bằng tia laser. | Rất linh hoạt, cấu hình vùng đa dạng. | Chi phí cao, cài đặt phức tạp. |
| Thảm áp lực an toàn | Thảm đặt trên sàn, cảm nhận trọng lượng. | Đơn giản, hiệu quả cho vùng cụ thể. | Dễ bị che khuất, giới hạn vùng bảo vệ. |
| Nút dừng khẩn cấp | Nút nhấn đỏ dễ tiếp cận. | Dừng ngay lập tức, bắt buộc. | Không ngăn ngừa tiếp cận ban đầu. |
4. Thiết Kế Vùng Làm Việc An Toàn Theo Tiêu Chuẩn
Việc thiết kế vùng làm việc an toàn của robot không chỉ đơn thuần là đặt hàng rào an toàn mà còn phải tuân thủ nghiêm ngặt các tiêu chuẩn an toàn quốc tế để đảm bảo hiệu quả bảo vệ tối đa.
4.1. Tuân thủ ISO 10218-2 và ISO 12100
ISO 10218-2 cung cấp các yêu cầu cụ thể về việc đánh giá rủi ro và thiết kế hệ thống an toàn cho robot, là tiêu chuẩn chủ đạo mà các nhà tích hợp và người dùng phải tuân thủ. Nó hướng dẫn cách xác định các mối nguy hiểm, đánh giá mức độ rủi ro, và lựa chọn các biện pháp an toàn phù hợp cho toàn bộ hệ thống robot, bao gồm cả vùng làm việc của robot. Bên cạnh đó, ISO 12100 cung cấp các nguyên tắc chung về thiết kế an toàn máy móc, đưa ra các phương pháp để xác định mối nguy, đánh giá rủi ro và lựa chọn các biện pháp giảm thiểu, là nền tảng cho mọi thiết kế an toàn trong môi trường công nghiệp.
4.2. Xác định khoảng cách an toàn
Một yếu tố cực kỳ quan trọng trong thiết kế vùng làm việc an toàn là xác định chính xác khoảng cách an toàn tối thiểu từ hàng rào an toàn (hoặc bất kỳ thiết bị bảo vệ nào) đến vùng nguy hiểm của robot. Khoảng cách này được tính toán dựa trên nhiều yếu tố, bao gồm:
- Tốc độ di chuyển của robot: Robot càng nhanh thì khoảng cách an toàn càng phải lớn.
- Thời gian phản ứng của hệ thống an toàn: Thời gian từ khi cảm biến phát hiện nguy hiểm đến khi robot dừng hoàn toàn.
- Thời gian phản ứng của con người: Khoảng thời gian trung bình để một người nhận biết nguy hiểm và phản ứng (ví dụ: rút tay ra).
- Khả năng tiếp cận qua hoặc vòng qua: Đảm bảo không có cách nào để người lao động có thể vươn tới vùng nguy hiểm từ bên ngoài hàng rào.

4.3. Thiết kế cho robot hợp tác (cobots) theo ISO/TS 15066
Đối với robot hợp tác (cobots), việc thiết kế vùng làm việc an toàn có sự khác biệt đáng kể do tính chất tương tác trực tiếp với con người. ISO/TS 15066 là tiêu chuẩn chuyên biệt, cung cấp hướng dẫn về các phương pháp an toàn cho cobots như giám sát tốc độ và khoảng cách, điều khiển công suất và lực giới hạn. Thiết kế vùng làm việc cho cobots tập trung vào việc tạo ra các vùng làm việc chung (shared workspace) và vùng làm việc hợp tác (collaborative workspace) nơi robot và con người có thể cùng tồn tại và thực hiện nhiệm vụ một cách linh hoạt mà vẫn đảm bảo an toàn. Điều này đòi hỏi sự tích hợp chặt chẽ của các cảm biến an toàn thông minh để robot có thể điều chỉnh hành vi của mình theo sự hiện diện của con người.
4.4. Xem xét các yếu tố khác
Ngoài các yếu tố trên, khi thiết kế vùng làm việc an toàn, cần xem xét kỹ lưỡng các yếu tố thực tế trong nhà máy:
- Luồng vật liệu và đường đi bộ của con người: Đảm bảo các tuyến đường di chuyển của vật liệu và nhân viên không bị cản trở hoặc không vô tình dẫn họ vào vùng nguy hiểm.
- Vị trí của bảng điều khiển, thiết bị bảo trì: Các thiết bị này cần được đặt ở vị trí an toàn, dễ tiếp cận mà không cần vào vùng nguy hiểm khi robot đang hoạt động.
- Yêu cầu về tầm nhìn: Đảm bảo người vận hành có tầm nhìn rõ ràng về robot và vùng làm việc của robot để giám sát hoạt động và phát hiện sự cố kịp thời.
5. Thách Thức Và Giải Pháp Trong Việc Triển Khai An Toàn Robot
Việc triển khai hàng rào an toàn và vùng làm việc của robot hiệu quả đi kèm với những thách thức đáng kể, nhưng cũng có những giải pháp tiên tiến để vượt qua.
5.1. Thách thức
- Sự cân bằng giữa an toàn và hiệu quả sản xuất/linh hoạt: Một trong những thách thức lớn nhất là làm thế nào để đảm bảo an toàn tối đa mà không làm giảm đáng kể hiệu quả sản xuất hoặc tính linh hoạt của dây chuyền. Hàng rào an toàn quá cứng nhắc có thể hạn chế khả năng truy cập và bảo trì, gây mất thời gian.
- Chi phí đầu tư ban đầu cho các biện pháp an toàn tiên tiến: Các giải pháp an toàn cao cấp như laser scanner 3D, hệ thống cảm biến thị giác an toàn, hoặc các giải pháp cho robot hợp tác thường có chi phí đầu tư ban đầu đáng kể, có thể là rào cản cho các doanh nghiệp vừa và nhỏ.
- Sự phức tạp trong việc tích hợp các loại hàng rào an toàn và cảm biến: Việc kết hợp nhiều loại hàng rào an toàn vật lý và phi vật lý, cùng với các hệ thống cảm biến và điều khiển an toàn, đòi hỏi kỹ năng chuyên môn cao và có thể gây ra sự phức tạp trong thiết kế, lắp đặt và bảo trì.
- Đào tạo và duy trì nhận thức an toàn cho nhân viên: Ngay cả với hệ thống an toàn tốt nhất, yếu tố con người vẫn đóng vai trò quan trọng. Việc đảm bảo tất cả nhân viên được đào tạo an toàn đầy đủ và liên tục duy trì nhận thức về các mối nguy hiểm là một thách thức liên tục.

5.2. Giải pháp
- Thực hiện đánh giá rủi ro chuyên sâu ngay từ đầu: Bắt đầu bằng một quy trình đánh giá rủi ro toàn diện và chi tiết, có sự tham gia của các chuyên gia an toàn và kỹ thuật, để xác định chính xác các mối nguy và lựa chọn biện pháp an toàn phù hợp nhất ngay từ giai đoạn thiết kế.
- Áp dụng phương pháp “an toàn theo chức năng” (Safety by Design): Tích hợp an toàn vào thiết kế của hệ thống robot và môi trường làm việc ngay từ đầu, thay vì coi an toàn như một yếu tố bổ sung sau này. Điều này bao gồm việc lựa chọn các robot và thiết bị có chức năng an toàn tích hợp cao.
- Lựa chọn giải pháp an toàn phù hợp với ứng dụng và ngân sách: Không phải mọi ứng dụng đều cần các giải pháp an toàn đắt tiền nhất. Cân nhắc kỹ lưỡng giữa mức độ rủi ro, yêu cầu về linh hoạt và ngân sách để chọn lựa các loại hàng rào an toàn và cảm biến hiệu quả nhất. Ví dụ, robot hợp tác (cobots) có thể giảm bớt sự phụ thuộc vào hàng rào vật lý cứng nhắc.
- Đầu tư vào đào tạo an toàn và văn hóa an toàn: Xây dựng một văn hóa an toàn mạnh mẽ trong công ty thông qua các chương trình đào tạo an toàn định kỳ, nâng cao nhận thức về rủi ro, và khuyến khích nhân viên báo cáo bất kỳ vấn đề an toàn nào.
- Sử dụng công nghệ mô phỏng (Digital Twin) để thử nghiệm thiết kế an toàn: Các công cụ mô phỏng tiên tiến cho phép kỹ sư tạo ra một “bản sao số” của hệ thống robot và môi trường làm việc. Điều này cho phép họ thử nghiệm các kịch bản an toàn khác nhau, xác định điểm yếu và tối ưu hóa thiết kế của hàng rào an toàn và vùng làm việc của robot trong môi trường ảo trước khi triển khai thực tế, giảm thiểu chi phí và rủi ro.
6. Kết Luận
Việc thiết lập hàng rào an toàn và vùng làm việc của robot là nền tảng không thể thiếu để khai thác tối đa tiềm năng của cánh tay robot trong sản xuất công nghiệp mà vẫn đảm bảo an toàn tuyệt đối cho người lao động. Bằng cách hiểu rõ các khái niệm về vùng làm việc của robot và áp dụng các loại hàng rào an toàn phù hợp – từ rào chắn vật lý đến các hệ thống cảm biến thông minh – các doanh nghiệp có thể chủ động ngăn ngừa tai nạn và tạo ra một môi trường làm việc an toàn. Việc tuân thủ các tiêu chuẩn an toàn quốc tế như ISO 10218 và ISO/TS 15066 là kim chỉ nam để thiết kế vùng làm việc an toàn hiệu quả, đặc biệt đối với robot hợp tác (cobots). Mặc dù có những thách thức về sự cân bằng giữa an toàn và hiệu quả sản xuất cũng như chi phí, nhưng với sự phát triển của công nghệ và các giải pháp thông minh như Digital Twin, tương lai của an toàn robot sẽ ngày càng linh hoạt và đáng tin cậy hơn. Khuyến khích các doanh nghiệp ưu tiên an toàn, đầu tư vào thiết kế vùng làm việc an toàn và các hàng rào an toàn phù hợp, liên tục cập nhật kiến thức là chìa khóa để xây dựng một môi trường sản xuất robot an toàn, hiệu quả và bền vững.