
Robot công nghiệp
Cấu Tạo Cơ Bản Của Cánh Tay Robot Trong Sản Xuất Công Nghiệp
Cánh tay robot là công cụ thiết yếu, hình thành nên trái tim của mọi hệ thống robot công nghiệp hiện đại, biến đổi quy trình sản xuất truyền thống thành các dây chuyền tự động hiệu quả. Việc hiểu rõ cấu tạo cơ bản của cánh tay robot không chỉ cung cấp kiến thức nền tảng về cách chúng vận hành mà còn là chìa khóa để tối ưu hóa hiệu suất, thực hiện bảo trì hiệu quả và khắc phục sự cố. Một cánh tay robot thực hiện các tác vụ phức tạp như hàn robot, lắp ráp tự động, hay gắp đặt chính xác nhờ vào sự phối hợp nhịp nhàng giữa cơ cấu cơ khí, hệ thống truyền động, bộ điều khiển thông minh, các bộ phận cuối cánh tay chuyên dụng và mạng lưới cảm biến tinh vi.
Bài viết này sẽ đi sâu vào phân tích từng thành phần cấu tạo, từ đó giúp bạn có cái nhìn toàn diện về cách những cỗ máy này hoạt động và tầm quan trọng của chúng trong kỷ nguyên tự động hóa nhà máy.
1. Giới Thiệu Chung Cấu Trúc “Bộ Não” Và “Cơ Bắp” Của Cánh Tay Robot
1.1. Định nghĩa và tầm quan trọng
Cánh tay robot là các thiết bị cơ khí lập trình được, mô phỏng chuyển động và khả năng thao tác của cánh tay con người, đóng vai trò trung tâm trong mọi hệ thống robot công nghiệp hiện đại. Việc nắm vững cấu tạo cơ bản của cánh tay robot có tầm quan trọng sống còn vì nó cho phép các kỹ sư và nhà quản lý vận hành, bảo trì, và tối ưu hóa hiệu suất của robot một cách hiệu quả nhất.
Mọi tác vụ mà robot thực hiện, dù là hàn robot phức tạp, lắp ráp tự động linh kiện tinh vi, hay gắp đặt chính xác sản phẩm, đều phụ thuộc vào sự tương tác hoàn hảo giữa các bộ phận cấu thành. Sự hiểu biết này giúp doanh nghiệp khai thác tối đa tiềm năng của robot, đảm bảo chúng hoạt động ổn định và đạt năng suất cao nhất trong môi trường tự động hóa nhà máy.
1.2. Tổng quan về các thành phần chính
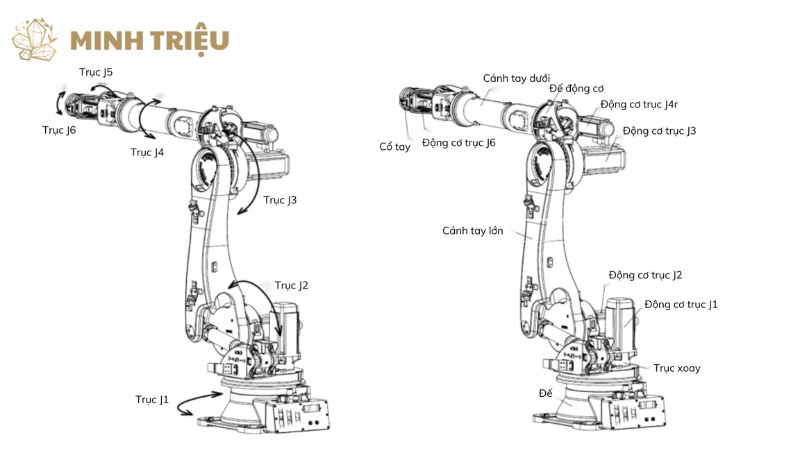
Một cánh tay robot bao gồm nhiều thành phần phối hợp nhịp nhàng để tạo nên khả năng vận hành linh hoạt và chính xác. Các nhóm bộ phận chính sẽ được phân tích chi tiết bao gồm: Cơ cấu cơ khí (khung sườn, khớp, khâu), Hệ thống truyền động (động cơ, hộp giảm tốc), Hệ thống điều khiển (bộ điều khiển, phần mềm), Bộ phận cuối cánh tay (End-effector) và Hệ thống cảm biến. Mỗi thành phần có vai trò riêng biệt nhưng đều quan trọng như nhau trong việc định hình năng lực và ứng dụng của robot trong sản xuất.
2. Phân Tích Chuyên Sâu Các Thành Phần Cấu Tạo Cơ Bản của Cánh Tay Robot
Mỗi bộ phận trong cấu tạo cơ bản của cánh tay robot đóng góp vào khả năng vận hành và hiệu suất tổng thể của hệ thống.
2.1. Cơ Cấu Cơ Khí (Mechanical Structure)
Cơ cấu cơ khí cung cấp bộ khung xương và cấu trúc vật lý cho cánh tay robot, đảm bảo sự ổn định và khả năng di chuyển linh hoạt.
2.1.1. Thân robot (Robot Body/Base)
Thân robot là nền tảng vững chắc, cố định các khớp và liên kết, đảm bảo sự ổn định cần thiết và có khả năng chịu toàn bộ tải trọng của cánh tay robot khi hoạt động. Cấu tạo của thân robot thường làm từ các vật liệu có độ cứng cao như thép hợp kim, nhôm đúc, hoặc vật liệu composite, giúp chống rung lắc và chịu lực xoắn tốt trong quá trình vận hành liên tục.
Thân robot có tầm quan trọng đặc biệt vì nó cung cấp một nền tảng vững chắc, ảnh hưởng trực tiếp đến độ chính xác lặp lại và khả năng chịu tải của robot, đảm bảo hiệu suất ổn định ngay cả khi thực hiện các tác vụ nặng.
2.1.2. Các khớp (Joints)
Các khớp là những bộ phận thiết yếu, cho phép cánh tay robot thực hiện các chuyển động quay hoặc tịnh tiến, từ đó tạo nên sự linh hoạt và khả năng di chuyển trong không gian. Có hai loại khớp chính:
- Khớp quay (Revolute Joint – R), cho phép chuyển động xoay quanh một trục, rất phổ biến ở các robot khớp nối (robot công nghiệp 6 trục), mang lại sự linh hoạt tương tự cánh tay người.
- Loại thứ hai là Khớp tịnh tiến (Prismatic Joint – P), cho phép chuyển động thẳng theo một trục, thường được tìm thấy ở robot Cartesian (robot trục tọa độ), đảm bảo độ chính xác cao trong các chuyển động tuyến tính.
Các khớp có tầm quan trọng vì chúng xác định số lượng bậc tự do (Degrees of Freedom – DoF) của robot và khả năng tiếp cận không gian làm việc, từ đó quyết định loại hình tác vụ mà robot có thể thực hiện.
2.1.3. Các khâu/tay robot (Links/Arms)
Các khâu hay tay robot là những bộ phận cứng, nối liền giữa các khớp, tạo thành chuỗi động học của cánh tay robot và xác định hình dáng tổng thể của nó. Cấu tạo của các khâu được thiết kế tối ưu về khối lượng và độ cứng vững, đảm bảo chúng đủ nhẹ để di chuyển nhanh nhưng đủ cứng để không bị biến dạng dưới tải trọng.
Các khâu có tầm quan trọng vì chúng xác định tầm với (reach) và không gian làm việc (working envelope) của robot, ảnh hưởng đến khả năng tiếp cận các vị trí làm việc và khả năng chịu tải của cánh tay.
2.2. Hệ Thống Truyền Động (Actuation System)
Hệ thống truyền động là nguồn năng lượng, cung cấp chuyển động cần thiết cho các khớp của robot, biến đổi năng lượng điện thành chuyển động cơ học.
2.2.1. Động cơ (Motors)
Động cơ đóng vai trò là “cơ bắp” của robot, cung cấp lực và mô-men xoắn để di chuyển các khớp với độ chính xác và tốc độ yêu cầu. Động cơ Servo là loại phổ biến nhất trong robot công nghiệp vì chúng mang lại độ chính xác cao trong việc điều khiển vị trí, tốc độ và mô-men xoắn, rất quan trọng cho các ứng dụng robot gắp đặt chính xác.
Ngoài ra, Động cơ Stepper cũng được sử dụng trong một số ứng dụng đơn giản hơn, mặc dù chúng có độ chính xác và tốc độ thấp hơn. Sự lựa chọn động cơ có tầm quan trọng vì nó quyết định tốc độ hoạt động, gia tốc và khả năng chịu tải của robot, là yếu tố then chốt cho các robot tốc độ cao như Robot Delta.

2.2.2. Hộp giảm tốc (Gearboxes/Reducers)
Hộp giảm tốc có vai trò quan trọng trong việc giảm tốc độ quay từ động cơ và tăng mô-men xoắn đầu ra, giúp robot có đủ lực để thực hiện các tác vụ nặng với độ chính xác cao. Các loại hộp giảm tốc phổ biến bao gồm Harmonic Drive (giảm độ rơ cực thấp), Cycloidal và Planetary Gear. Hộp giảm tốc có tầm quan trọng vì chúng tăng cường sức mạnh và độ chính xác của hệ thống truyền động, đồng thời giảm độ rơ (backlash) – một yếu tố ảnh hưởng đến độ chính xác lặp lại của robot.
2.2.3. Hệ thống truyền lực (Power Transmission)
Hệ thống truyền lực đảm bảo chuyển động được truyền tải hiệu quả từ động cơ đến các khớp và khâu của robot. Các phương pháp truyền lực bao gồm dây đai, bánh răng, và trục vít me bi (ball screw). Hệ thống này có tầm quan trọng vì nó ảnh hưởng trực tiếp đến hiệu suất tổng thể, độ bền và chi phí bảo trì của robot. Thiết kế tối ưu của hệ thống truyền lực giúp giảm ma sát và tổn thất năng lượng, nâng cao hiệu quả hoạt động.
2.3. Hệ Thống Điều Khiển (Control System)
Hệ thống điều khiển là “bộ não”, chỉ đạo mọi hoạt động của cánh tay robot, đảm bảo chúng thực hiện đúng các tác vụ đã được lập trình.
2.3.1. Bộ điều khiển robot (Robot Controller)
Bộ điều khiển robot là trung tâm xử lý, tiếp nhận lệnh từ người vận hành hoặc hệ thống cấp trên, xử lý thông tin từ các cảm biến, và điều phối hoạt động của tất cả các bộ phận cơ khí và truyền động. Cấu tạo của bộ điều khiển bao gồm một bộ vi xử lý (CPU) mạnh mẽ, bộ nhớ để lưu trữ chương trình, các module I/O (Input/Output) để giao tiếp với các thiết bị ngoại vi, và phần mềm điều khiển chuyên dụng.
Các chức năng chính của nó bao gồm lập trình đường đi (path planning), điều khiển động học (kinematics control), quản lý tín hiệu I/O, và giao tiếp với các hệ thống điều khiển khác như PLC (Programmable Logic Controller) và HMI (Human-Machine Interface). Bộ điều khiển có tầm quan trọng quyết định vì nó quyết định khả năng lập trình, tính linh hoạt, và khả năng tích hợp của robot trong môi trường tự động hóa công nghiệp phức tạp.
2.3.2. Phần mềm điều khiển (Control Software)
Phần mềm điều khiển cung cấp giao diện để người dùng lập trình, mô phỏng, giám sát và điều chỉnh hoạt động của robot một cách trực quan. Phần mềm này thường có các tính năng như lập trình điểm (teach pendant), lập trình offline (off-line programming), và khả năng chuẩn đoán lỗi, giúp tối ưu hóa quy trình làm việc.
Đặc biệt, các cobot có phần mềm thân thiện và dễ sử dụng, giảm thiểu thời gian đào tạo và tăng tốc quá trình triển khai. Phần mềm điều khiển có tầm quan trọng vì nó ảnh hưởng trực tiếp đến mức độ dễ sử dụng, hiệu quả vận hành và khả năng tối ưu hóa quy trình sản xuất của robot.

2.4. Bộ Phận Cuối Cánh Tay (End-effector/Gripper)
Bộ phận cuối cánh tay là dụng cụ hoặc công cụ chuyên biệt, được gắn vào đầu cuối của cánh tay robot và trực tiếp thực hiện các tác vụ công việc trên sản phẩm hoặc vật liệu.
| Loại End-effector | Mô tả | Ứng dụng chính |
| Kẹp/Gắp (Grippers) | Dùng để kẹp và giữ vật thể. Có thể là cơ khí (kẹp bằng ngón), khí nén (sử dụng áp suất khí), hoặc chân không (tạo lực hút). | Robot gắp đặt chính xác, robot đóng gói, robot pick and place trong các ngành điện tử, thực phẩm. |
| Dụng cụ hàn (Welding Tools) | Mỏ hàn điểm, mỏ hàn hồ quang, máy hàn laser. | Robot hàn trong ngành ô tô, kết cấu thép, sản xuất máy móc. |
| Dụng cụ phun sơn (Paint Guns) | Súng phun sơn tự động, điều khiển bằng robot để sơn bề mặt sản phẩm đồng đều. | Robot sơn trong ngành ô tô, đồ nội thất, thiết bị gia dụng. |
| Dụng cụ lắp ráp (Assembly Tools) | Tua vít tự động, dụng cụ nén, dụng cụ ép, dụng cụ cắt dây. | Robot lắp ráp tự động linh kiện điện tử, cơ khí, sản phẩm tiêu dùng. |
| Dụng cụ kiểm tra/Camera (Inspection Tools) | Camera 2D/3D, cảm biến laser, cảm biến siêu âm để kiểm tra chất lượng. | Kiểm tra chất lượng sản phẩm, đo lường kích thước, phát hiện lỗi. |
| Các loại khác | Máy mài, máy cắt, dụng cụ đánh bóng, dụng cụ dán keo. | Gia công bề mặt, hoàn thiện sản phẩm, ứng dụng chuyên biệt. |
Bộ phận cuối cánh tay có tầm quan trọng sống còn vì nó quyết định khả năng thực hiện tác vụ cụ thể của robot, đóng vai trò là giao diện trực tiếp giữa robot và môi trường làm việc, chuyển đổi khả năng di chuyển của cánh tay thành hành động cụ thể trên sản phẩm.
2.5. Hệ Thống Cảm Biến (Sensor System)
Hệ thống cảm biến là “các giác quan” của robot, thu thập thông tin từ môi trường xung quanh và trạng thái bên trong của robot, từ đó cung cấp dữ liệu quan trọng cho bộ điều khiển để ra quyết định và điều chỉnh hành vi. Các loại cảm biến phổ biến bao gồm:
- Cảm biến vị trí: Encoder và Resolver là các thiết bị đo lường góc quay hoặc vị trí tuyến tính của từng khớp, rất quan trọng để robot biết chính xác vị trí của nó trong không gian. Chúng đảm bảo độ chính xác lặp lại và định vị của robot.
- Cảm biến lực/mô-men xoắn: Các cảm biến này được đặt ở các khớp hoặc trên bộ phận cuối cánh tay, đo lường lực tác động lên robot. Chúng đặc biệt quan trọng đối với cobot (robot cộng tác), cho phép chúng phát hiện va chạm và tương tác an toàn với con người trong môi trường làm việc chung, thực hiện robot an toàn.
- Cảm biến thị giác (Vision Sensors): Camera 2D/3D và hệ thống xử lý ảnh giúp robot nhận diện vật thể, định vị chúng trong không gian, phân loại sản phẩm, và thực hiện kiểm tra chất lượng dựa trên hình ảnh. Đây là thành phần thiết yếu cho robot thông minh và các ứng dụng phức tạp.
- Cảm biến va chạm/an toàn: Các cảm biến này phát hiện sự tiếp xúc bất ngờ hoặc vật cản trong đường di chuyển của robot, kích hoạt cơ chế dừng khẩn cấp để ngăn ngừa tai nạn và bảo vệ cả robot lẫn con người.
Hệ thống cảm biến có tầm quan trọng to lớn vì chúng nâng cao khả năng tự hành, độ chính xác, an toàn, và tính linh hoạt của robot, cho phép robot hoạt động hiệu quả trong các môi trường phức tạp và tương tác động với môi trường xung quanh.
3. Tương Quan Giữa Cấu Tạo Và Ứng Dụng Của Cánh Tay Robot Công Nghiệp
Cấu tạo cơ bản của cánh tay robot có mối liên hệ mật thiết với loại hình và khả năng ứng dụng của nó trong thực tế sản xuất công nghiệp.
3.1. Cấu tạo quyết định loại hình và khả năng
Mỗi loại cánh tay robot có một cấu tạo đặc trưng phù hợp với các ứng dụng riêng biệt. Robot khớp nối, với nhiều khớp quay và bậc tự do cao, là lựa chọn tối ưu cho các tác vụ linh hoạt, đa chiều như hàn robot, sơn robot, và xử lý vật liệu. Ngược lại, robot Cartesian, với các trục tuyến tính và cấu trúc hình chữ nhật, tối ưu cho các tác vụ đòi hỏi độ chính xác cao trên một mặt phẳng, ví dụ như gắp đặt chính xác các linh kiện PCB.
Robot SCARA được thiết kế với cấu trúc đặc biệt (linh hoạt ngang, cứng vững dọc), chuyên dụng cho lắp ráp tự động và gắp đặt tốc độ cao các linh kiện nhỏ. Trong khi đó, Robot Delta nổi bật với cấu trúc song song và trọng lượng nhẹ, ưu việt cho các tác vụ pick and place siêu tốc trong ngành thực phẩm và dược phẩm.
Cuối cùng, Cobot được trang bị cảm biến lực và thiết kế an toàn, rất thích hợp cho các ứng dụng làm việc cộng tác trực tiếp với con người, đảm bảo robot an toàn trong môi trường chung.

3.2. Sự phát triển của cấu tạo và công nghệ
Công nghệ robot đang không ngừng phát triển, hướng tới các thiết kế có cấu tạo gọn nhẹ hơn nhưng vẫn đảm bảo độ chính xác và hiệu suất vượt trội. Sự ra đời của các vật liệu mới, nhẹ hơn và bền hơn, đã giúp giảm khối lượng tổng thể của robot, tăng tốc độ và tầm với mà vẫn duy trì độ cứng vững.
Kỹ thuật chế tạo tiên tiến cũng cho phép sản xuất các linh kiện với dung sai chặt chẽ hơn, nâng cao độ chính xác và độ bền của robot. Xu hướng tự động hóa công nghiệp này đang thúc đẩy việc phát triển các cấu trúc robot modular (có thể tùy biến), dễ dàng thích nghi với nhiều ứng dụng khác nhau và giảm thời gian triển khai.
4. Kết Luận
Chúng ta đã khám phá chi tiết về cấu tạo cơ bản của cánh tay robot, bao gồm cơ cấu cơ khí (thân, khớp, khâu), hệ thống truyền động (động cơ, hộp giảm tốc), hệ thống điều khiển (bộ điều khiển, phần mềm), bộ phận cuối cánh tay (end-effector) và hệ thống cảm biến. Mỗi thành phần đóng một vai trò không thể thiếu, quyết định khả năng vận hành, độ chính xác và tính linh hoạt của robot.
Hiểu biết sâu sắc về các bộ phận này là nền tảng để khai thác tối đa tiềm năng của robot công nghiệp trong mọi khía cạnh của tự động hóa nhà máy. Để đảm bảo robot của bạn hoạt động hiệu quả tối đa và kéo dài tuổi thọ thiết bị, việc đầu tư vào đào tạo nhân sự về cấu tạo, vận hành, và bảo trì robot là điều cần thiết. Nắm vững kiến thức này giúp bạn tối ưu hóa các giải pháp tự động hóa và nâng cao năng lực sản xuất.