
Thị giác máy (Machine Vision)
Xử Lý Dữ Liệu Điểm Đám Mây (Point Cloud Processing): Nền Tảng Sống Còn Của Thị Giác Máy 3D

Dữ liệu 3D đã đưa Point Cloud trở thành chuẩn ngôn ngữ mới cho Machine Vision và robot trong Công nghiệp 4.0, giúp xử lý các tác vụ phức tạp như kiểm tra kích thước, Bin Picking hay dẫn đường tự hành. Tuy nhiên, Point Cloud thô thường nhiễu, không đồng đều và nặng, nên cần các bước xử lý như lọc Voxel, ICP hay mạng PointNet để tối ưu hiệu năng, độ tin cậy và tốc độ. Hiểu và ứng dụng đúng kỹ thuật xử lý dữ liệu này là chìa khóa cho tự động hóa chính xác và bền vững.
1. Dữ Liệu Điểm Đám Mây (Point Cloud) Là Gì và Vì Sao Nó Quan Trọng?
1.1. Định Nghĩa và Cấu Trúc Dữ Liệu Điểm Đám Mây
Điểm Đám Mây là một tập hợp không có thứ tự các điểm dữ liệu trong không gian ba chiều. Về mặt định nghĩa, Point Cloud biểu diễn một tập hợp P={p1,p2,…,pN}, trong đó mỗi điểm pi chứa tối thiểu thông tin tọa độ (x,y,z). Thông thường, mỗi điểm pi còn bao gồm các thuộc tính bổ sung quan trọng cho việc phân tích, chẳng hạn như cường độ phản xạ ánh sáng (Intensity), thông tin màu sắc (RGB), và Véctơ Pháp Tuyến (Normal Vector) đại diện cho hướng bề mặt tại điểm đó.
Cấu trúc phi cấu trúc này cho phép biểu diễn các vật thể có hình học phức tạp một cách trung thực và chi tiết, làm cho nó trở thành đầu vào lý tưởng cho các ứng dụng Thị giác máy cần nhận thức không gian tuyệt đối.
1.2. Phân biệt Point Cloud và Lưới Tam Giác (Mesh)
Mặc dù cả hai đều là phương tiện biểu diễn hình học 3D, Point Cloud khác biệt cơ bản với Lưới Tam Giác (Mesh) về cấu trúc và mức độ liên kết. Point Cloud là một tập hợp rời rạc các điểm không có mối quan hệ topo rõ ràng giữa các điểm lân cận. Ngược lại, Lưới Tam Giác (Mesh) là một cấu trúc có tổ chức, bao gồm các đỉnh (Vertices), các cạnh (Edges), và các mặt tam giác (Faces), trong đó các mặt tam giác định rõ mối quan hệ liên kết bề mặt giữa các điểm, tạo thành một hình học liền mạch.
Lưới Tam Giác thường là sản phẩm của quá trình xử lý Point Cloud và được sử dụng trong đồ họa máy tính, in 3D, hoặc Đảo ngược Kỹ thuật (Reverse Engineering), còn Point Cloud thô được dùng nhiều hơn cho phân tích không gian và nhận dạng đối tượng trong thời gian thực.
1.3. Nguồn Gốc: Các Loại Cảm Biến Tạo Ra Point Cloud trong Công Nghiệp
Các hệ thống Thị giác máy công nghiệp thu thập dữ liệu Point Cloud từ nhiều loại cảm biến 3D khác nhau, mỗi loại có nguyên lý hoạt động và đặc tính nhiễu riêng biệt. Việc hiểu rõ nguồn gốc dữ liệu là cần thiết để lựa chọn phương pháp xử lý thích hợp. Các nguồn tạo Point Cloud chính bao gồm:
- Máy quét Lidar (Quét Laser): Cảm biến đo khoảng cách chính xác bằng cách bắn tia laser và sử dụng cơ chế tương tự Time-of-Flight (ToF), thích hợp cho việc lập bản đồ phạm vi lớn và AGV/AMR do tính chính xác cao và khả năng chống ánh sáng mạnh.
- Cảm biến Thời gian bay (ToF): Thiết bị đo trực tiếp độ trễ của ánh sáng phản xạ, tạo ra bản đồ chiều sâu (Depth Map) nhanh chóng và được sử dụng rộng rãi trong các ứng dụng cần tốc độ cao và Latency thấp.
- Thị giác Stereo (Stereo Vision) và Ánh sáng có cấu trúc (Structured Light): Stereo Vision sử dụng nguyên tắc Triangulation từ hai camera, tạo ra Point Cloud giàu chi tiết hơn ở phạm vi gần, trong khi Structured Light chiếu một mẫu ánh sáng (pattern) lên vật thể để tăng độ chính xác trên các bề mặt đồng nhất.
2. Các Giai Đoạn Tiền Xử Lý Dữ Liệu Điểm Đám Mây (Pre-processing)
Dữ liệu Point Cloud thô thường chứa lỗi, nhiễu và thừa thải, do đó, tiền xử lý là bước bắt buộc nhằm chuẩn hóa và tối ưu hóa tập dữ liệu trước khi áp dụng các thuật toán phân tích chuyên sâu.
2.1. Đọc và Quản lý Định Dạng Dữ Liệu (PLY, LAS, PCD)
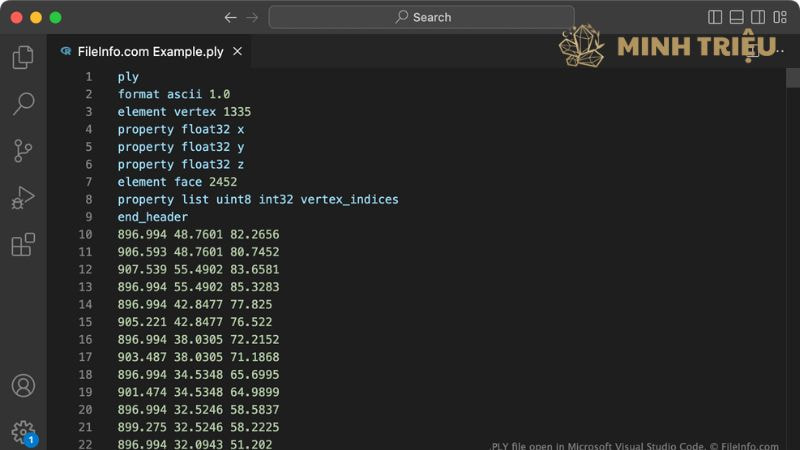
Tại sao định dạng dữ liệu lại quan trọng? Việc sử dụng các định dạng tệp chuẩn là thiết yếu để đảm bảo khả năng tương thích và trao đổi dữ liệu giữa các phần mềm Machine Vision và các công cụ xử lý. Các định dạng phổ biến nhất cho Point Cloud trong công nghiệp và nghiên cứu bao gồm:
- PLY (Polygon File Format/Stanford Triangle Format): Định dạng linh hoạt, hỗ trợ cả dữ liệu Point Cloud và Lưới Tam Giác, thường lưu trữ thông tin về tọa độ, màu sắc và pháp tuyến.
- LAS (Lidar Data Exchange Format): Định dạng tiêu chuẩn cho dữ liệu Lidar hàng không và mặt đất, tối ưu hóa cho việc lưu trữ các tập dữ liệu cực lớn và bao gồm các siêu dữ liệu quan trọng như lớp và thời gian GPS.
- PCD (Point Cloud Data): Định dạng được sử dụng bởi thư viện Point Cloud Library (PCL), được tối ưu hóa cho việc xử lý và tính toán hiệu quả.
2.2. Lọc và Loại bỏ Nhiễu (Outlier Removal)
Làm thế nào để làm sạch dữ liệu nhiễu trong Point Cloud? Loại bỏ nhiễu (Outlier Removal) là quá trình xác định và loại bỏ các điểm dữ liệu không chính xác, thường là kết quả của lỗi cảm biến, phản xạ ánh sáng sai, hoặc vật thể bay lơ lửng. Việc loại bỏ các điểm nhiễu này giúp tăng độ chính xác của các phép đo và thuật toán phân đoạn tiếp theo. Hai phương pháp lọc nhiễu phổ biến:
- Bộ lọc Thống kê (Statistical Outlier Removal – SOR): Phương pháp này loại bỏ các điểm mà khoảng cách trung bình đến các điểm lân cận của chúng lớn hơn một ngưỡng thống kê (ví dụ: một số độ lệch chuẩn so với khoảng cách trung bình toàn bộ tập dữ liệu).
- Lọc theo Bán kính (Radius Outlier Removal): Kỹ thuật này loại bỏ các điểm có số lượng điểm lân cận (trong một bán kính xác định) thấp hơn một ngưỡng tối thiểu, giả định rằng các điểm nhiễu thường bị cô lập.
2.3. Giảm Mật Độ Dữ Liệu (Downsampling) và Lưới Hộp (Voxel Grid Filtering)
Tại sao phải tối ưu hóa kích thước Point Cloud? Việc giảm mật độ dữ liệu (Downsampling) là cần thiết vì các tập dữ liệu Point Cloud thô có thể chứa hàng triệu hoặc hàng tỷ điểm, gây ra thách thức nghiêm trọng về tính toán và bộ nhớ, đặc biệt trong các ứng dụng thời gian thực. Lưới Hộp (Voxel Grid Filtering) là phương pháp giảm mật độ được ưu tiên trong Machine Vision công nghiệp.
Phương pháp Voxel Grid Filtering hoạt động bằng cách:
- Chia không gian 3D thành các khối lập phương đều nhau gọi là Voxel.
- Đại diện cho tất cả các điểm nằm trong một Voxel bằng một điểm duy nhất (thường là điểm trung tâm hoặc trọng tâm của tất cả các điểm đó).
Phương pháp này không chỉ tối ưu hóa tài nguyên tính toán mà còn tạo ra Point Cloud có mật độ đồng đều hơn, giúp các thuật toán như ICP (Iterative Closest Point) hoạt động hiệu quả hơn mà vẫn giữ được đặc trưng hình học cốt lõi của vật thể.

2.4. Tính Toán Véctơ Pháp Tuyến (Normal Vector Estimation)
Tại sao Véctơ pháp tuyến lại quan trọng cho phân tích bề mặt? Véctơ Pháp Tuyến (Normal Vector), định nghĩa là một vectơ đơn vị vuông góc với bề mặt tại một điểm cụ thể, cung cấp thông tin hình học quan trọng về hướng bề mặt của vật thể. Việc ước lượng Véctơ Pháp Tuyến là bước thiết yếu trước khi thực hiện các phép toán phân tích bề mặt, đặc biệt là Phân đoạn (Segmentation).
Quá trình tính toán thường dựa trên việc phân tích các điểm lân cận (Neighborhood Search) bằng cách sử dụng thuật toán PCA (Principal Component Analysis) trên tập hợp các điểm lân cận, xác định mặt phẳng tiếp tuyến, và suy ra hướng pháp tuyến.
3. Các Thuật Toán Xử Lý Nền Tảng (Core Processing Algorithms)
Các thuật toán xử lý cốt lõi chuyển đổi Point Cloud đã được làm sạch thành các mô hình hình học có thể sử dụng được, phục vụ cho các quyết định tự động hóa.
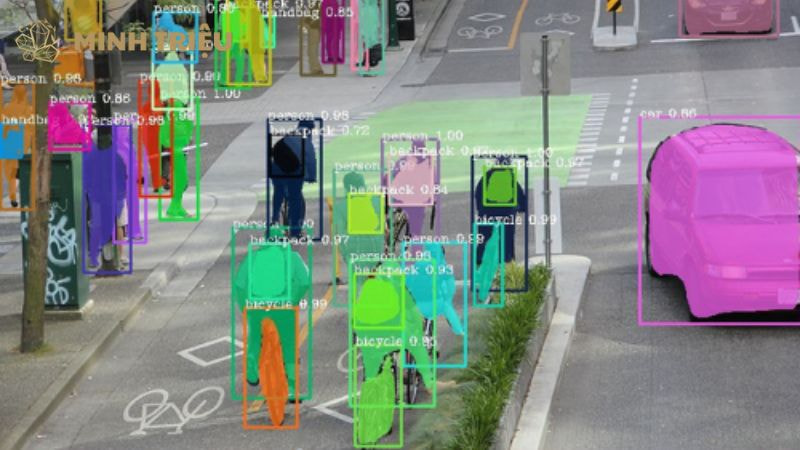
3.1. Phân Đoạn (Segmentation) và Phân Tách Đối Tượng
Làm thế nào để cô lập các đối tượng riêng lẻ trong đám mây điểm? Phân Đoạn (Segmentation) là quá trình nhóm các điểm dữ liệu thành các tập hợp con có ý nghĩa dựa trên các thuộc tính hình học chung, như độ cong, màu sắc, hoặc hướng pháp tuyến. Mục tiêu chính là phân tách đối tượng khỏi môi trường xung quanh (background) và các đối tượng khác.
Hai chiến lược phân đoạn nền tảng:
- Phân đoạn dựa trên mặt phẳng (Plane Segmentation): Phương pháp này được sử dụng để xác định và loại bỏ các bề mặt phẳng lớn như sàn nhà, tường, hoặc băng tải. Thuật toán RANSAC (Random Sample Consensus) là thuật toán phổ biến nhất, hoạt động bằng cách chọn ngẫu nhiên một tập hợp nhỏ các điểm và kiểm tra xem bao nhiêu điểm khác khớp với mô hình mặt phẳng được xác định bởi các điểm đã chọn.
- Phân đoạn dựa trên cụm (Clustering): Sau khi loại bỏ các mặt phẳng, các điểm còn lại được nhóm thành các cụm (cluster) đại diện cho các vật thể riêng biệt. Thuật toán K-means và DBSCAN (Density-Based Spatial Clustering of Applications with Noise) là các kỹ thuật thường được áp dụng, trong đó DBSCAN tỏ ra hiệu quả hơn trong việc xử lý các cụm có hình dạng không đều.
3.2. Đăng Ký và Hợp Nhất Dữ Liệu (Registration and Fusion)
Làm thế nào để hợp nhất nhiều lần quét Point Cloud thành một mô hình thống nhất? Đăng Ký (Registration) là quá trình tìm kiếm phép biến đổi không gian (phép quay và tịnh tiến) để căn chỉnh hai hoặc nhiều Point Cloud (hoặc các lần quét khác nhau) vào cùng một hệ tọa độ chung.
Điều này là cần thiết để tạo ra một mô hình 3D hoàn chỉnh của một vật thể lớn hoặc một khu vực rộng. Thuật toán Iterative Closest Point (ICP) là giải pháp tiêu chuẩn cho bài toán đăng ký.
- Nguyên lý ICP: ICP hoạt động lặp đi lặp lại bằng cách tìm kiếm các cặp điểm tương ứng gần nhất (Closest Points) giữa hai Point Cloud, tính toán sai số, và sau đó tìm phép biến đổi tối ưu (Rotation và Translation) để giảm thiểu sai số trung bình giữa các cặp điểm này.
- Biến thể ICP: Các biến thể được phát triển để tăng tốc độ và độ bền vững, bao gồm Point-to-Plane ICP (tối ưu hóa khoảng cách từ điểm đến mặt phẳng pháp tuyến) và sử dụng các Feature Descriptor để cung cấp điểm khớp ban đầu chính xác hơn.
3.3. Trích Xuất và Mô Tả Đặc Trưng Hình Học (Feature Description)
Làm thế nào để nhận dạng các khu vực quan trọng của vật thể trong Point Cloud? Trích Xuất Đặc Trưng (Feature Description) là quá trình tạo ra một mô tả số học (vector đặc trưng) cho một điểm cụ thể trong Point Cloud, dựa trên hình học của các điểm lân cận. Các vector đặc trưng này phải có tính chất bất biến đối với phép quay và tịnh tiến, cho phép hệ thống nhận dạng một khu vực hình học cụ thể bất kể góc nhìn của cảm biến.
Đặc trưng FPFH (Fast Point Feature Histograms): FPFH là một trong những bộ mô tả (Feature Descriptor) hình học phổ biến nhất, cung cấp một biểu diễn cô đọng về hình học xung quanh một điểm. FPFH đo đạc sự thay đổi của Véctơ Pháp Tuyến giữa một điểm và các điểm lân cận của nó, được sử dụng rộng rãi trong các ứng dụng:
- Nhận dạng đối tượng: Khớp các vector đặc trưng FPFH của một vật thể mẫu với các vector đặc trưng trong Point Cloud cảnh vật để nhanh chóng xác định vị trí của vật thể đó.
- Khớp dữ liệu ban đầu: Cung cấp điểm khớp ban đầu chất lượng cao cho thuật toán ICP, tăng tốc độ hội tụ và độ chính xác của quá trình Đăng Ký.

4. Ứng Dụng Chuyên Sâu Của Point Cloud trong Công Nghiệp
Khả năng xử lý Point Cloud đã mở ra nhiều cánh cửa tự động hóa và tối ưu hóa quy trình trong sản xuất công nghiệp mà dữ liệu 2D không thể thực hiện được.
4.1. Kiểm Tra Chất Lượng và Đo Lường (Quality Inspection and Metrology)
Point Cloud đóng vai trò gì trong kiểm tra chất lượng? Trong Đo lường (Metrology) và kiểm tra chất lượng, Point Cloud cung cấp một bản sao 3D kỹ thuật số có độ trung thực cao của sản phẩm. Kỹ thuật này đã thay thế các phương pháp đo cơ học tốn thời gian.
- So sánh Point Cloud với Mô hình CAD (CAD-to-Point Cloud Comparison): Đây là ứng dụng chủ lực, cho phép hệ thống tự động so sánh Point Cloud của chi tiết được sản xuất với mô hình CAD (Computer-Aided Design) lý tưởng. Hệ thống sẽ phát hiện ngay lập tức và trực quan hóa các sai lệch, độ cong, độ vênh, hay thiếu hụt vật liệu so với tiêu chuẩn thiết kế.
- Đo lường kích thước tự động: Point Cloud cho phép đo lường kích thước (chiều dài, đường kính, góc, thể tích) của vật thể một cách tự động, đảm bảo tính nhất quán và độ chính xác cao trong quá trình kiểm tra.
4.2. Robot Gắp Linh Kiện (Bin Picking) và Định Vị Chính Xác
Vai trò cốt lõi của Point Cloud trong Bin Picking là gì? Bin Picking (robot gắp linh kiện từ thùng chứa ngẫu nhiên) là một trong những thách thức khó khăn nhất của Machine Vision, và Point Cloud là chìa khóa để giải quyết nó. Robot cần phải xác định chính xác vị trí và hướng (pose) của các chi tiết kim loại chồng chéo, sắp xếp lộn xộn trong thùng.
- Phân đoạn chi tiết: Dữ liệu Point Cloud được sử dụng để phân đoạn và cô lập các chi tiết riêng lẻ trong thùng.
- Ước lượng Pose: Các thuật toán tiên tiến sau đó sẽ khớp mô hình CAD của chi tiết với Point Cloud đã phân đoạn để tính toán tọa độ gắp (grasping pose) tối ưu cho cánh tay robot.
Ứng dụng này yêu cầu độ chính xác milimet và tốc độ xử lý cực nhanh để đảm bảo robot cộng tác (Cobots) hoạt động hiệu quả trong dây chuyền.

4.3. Lập Bản Đồ và Điều Hướng Phương Tiện Tự Hành (SLAM)
Point Cloud giúp AGV/AMR điều hướng như thế nào? Trong lĩnh vực Logistics và tự động hóa kho bãi, Point Cloud là dữ liệu đầu vào chính cho các thuật toán SLAM (Simultaneous Localization and Mapping).
Các phương tiện tự hành (AGV/AMR) sử dụng dữ liệu Point Cloud từ cảm biến Lidar và ToF để:
- Xây dựng bản đồ môi trường 3D: Tạo ra một mô hình 3D chính xác của môi trường xung quanh (nhà máy, kho bãi) trong thời gian thực.
- Định vị: So sánh dữ liệu Point Cloud hiện tại với bản đồ đã xây dựng để xác định vị trí chính xác của phương tiện trong không gian 3D.
- Phát hiện và Tránh vật cản: Các thuật toán xử lý Point Cloud liên tục quét và phát hiện các vật thể không mong muốn (người, pallet, máy móc) để đảm bảo an toàn và lập lại lộ trình.
4.4. Đảo Ngược Kỹ Thuật (Reverse Engineering)
Đảo ngược Kỹ thuật sử dụng Point Cloud như thế nào? Đảo ngược Kỹ thuật (Reverse Engineering) là quá trình tạo lại mô hình CAD của một vật thể vật lý hiện có mà không có bản thiết kế gốc. Kỹ thuật này cực kỳ quan trọng trong việc bảo trì, tái tạo phụ tùng cũ hoặc phân tích sản phẩm của đối thủ. Point Cloud thô được thu thập bằng các máy quét có độ chính xác cao.
Sau đó, các kỹ sư sử dụng các công cụ xử lý để:
- Tạo Lưới Tam Giác (Mesh Generation): Chuyển đổi Point Cloud thô thành Lưới Tam Giác liền mạch.
- Khớp bề mặt (Surface Fitting): Lấy các mặt phẳng, hình trụ, và các hình học cơ bản từ Lưới Tam Giác để tái tạo mô hình CAD tham số, sẵn sàng cho việc sản xuất.

5. Kết Luận
Xử lý dữ liệu điểm đám mây (Point Cloud Processing) là nền tảng của thị giác máy 3D trong sản xuất, biến dữ liệu thô thành thông tin hình học phục vụ kiểm tra chất lượng, Bin Picking và SLAM. Thách thức lớn nhất hiện nay nằm ở hiệu năng thời gian thực và độ bền vững trong môi trường khắc nghiệt. Giải pháp là đầu tư vào học sâu (PointNet++) và Sensor Fusion để xây dựng hệ thống thị giác máy thông minh, chính xác và tối ưu hơn cho nhà máy tương lai.