
Thị giác máy (Machine Vision)
Xu Hướng Nghiên Cứu Về Thị Giác Máy 6D: Chìa Khóa Cho Robot Cộng Tác Đạt Chính Xác Tuyệt Đối

Thị giác máy 6D đang định hình lại cách Robot cộng tác trong sản xuất công nghiệp, cung cấp khả năng ước tính tư thế đầy đủ với sáu bậc tự do để thực hiện các tác vụ gắp đặt phức tạp và đảm bảo Sản xuất Không Lỗi. Việc ứng dụng các thuật toán Học sâu tiên tiến, tối ưu Edge AI và giảm độ trễ thời gian thực là chìa khóa để nâng cao hiệu suất vận hành (OEE) và triển khai thành công Machine Vision 6D trong nhà máy thông minh. Bài viết này sẽ tập trung vào việc phân tích các xu hướng nghiên cứu tiên tiến nhất về Thị giác máy 6D và trình bày lộ trình ứng dụng của chúng trong bối cảnh sản xuất công nghiệp.
1. Mở Đầu: Định Nghĩa Lại Thị Giác Máy Trong Kỷ Nguyên 6D
1.1. Thị giác máy 6D là gì? Khái niệm Vị trí và định hướng (3D Location + 3D Rotation)
Thị giác máy 6D là một hệ thống cảm biến thông minh xác định Vị trí và định hướng toàn diện của vật thể trong không gian ba chiều. Khái niệm 6D đề cập đến sáu tham số độc lập: ba tham số Vị trí tịnh tiến (x,y,z) và ba tham số Định hướng quay (roll, pitch, yaw – α,β,γ), việc này cung cấp tư thế (pose) tuyệt đối của vật thể.
Thông tin 6D này là cơ sở để Robot cộng tác có thể thực hiện các thao tác vật lý tinh vi như gắp đặt các bộ phận có hình dạng phức tạp hoặc lắp ráp siêu chính xác trong môi trường động. Sự chính xác của Ước tính tư thế 6D quyết định hiệu suất vận hành (OEE) của toàn bộ dây chuyền tự động.
1.2. Tại sao Thị giác máy 6D là xu hướng cốt lõi trong Sản xuất công nghiệp?
Thị giác máy 6D đã trở thành xu hướng cốt lõi trong Sản xuất công nghiệp bởi vì nó giải quyết trực tiếp yêu cầu về độ chính xác tuyệt đối và tính linh hoạt trong quá trình tự động hóa. Nhu cầu sản xuất các sản phẩm phức tạp (ví dụ: linh kiện điện tử, phụ tùng hàng không) đòi hỏi các hệ thống Machine Vision phải có khả năng định lượng không chỉ sự hiện diện của vật thể mà còn cả tư thế không gian chính xác của nó.
Công nghệ 6D này là yếu tố then chốt cho phép Robot cộng tác tương tác một cách thích nghi với các biến thể nhỏ trong môi trường làm việc, việc này thúc đẩy mục tiêu Sản xuất Không Lỗi và tăng cường khả năng Kiểm tra chất lượng hình học một cách toàn diện.

2. Nền Tảng Kỹ Thuật: Cơ Chế Thu Thập và Biểu Diễn Dữ Liệu 6D
2.1. Phân biệt cấp độ nhận thức: 3D, 5D, và Thị giác máy 6D
Các cấp độ nhận thức trong thị giác máy được phân biệt dựa trên số lượng bậc tự do mà hệ thống có thể định lượng, việc này cho thấy sự khác biệt lớn về khả năng thao tác vật lý. 3D Vision cung cấp thông tin Vị trí tịnh tiến (X,Y,Z) nhưng bỏ qua thông tin Định hướng quay, việc này hạn chế các tác vụ gắp đặt phức tạp đòi hỏi sự sắp xếp góc.
Thị giác máy 6D là cấp độ cao nhất, cung cấp thông tin Vị trí và định hướng đầy đủ (6 bậc tự do), việc này là bắt buộc cho việc dẫn hướng Robot cộng tác trong lắp ráp siêu chính xác. Khả năng Ước tính tư thế toàn diện này cho phép tự động hóa các công đoạn trước đây phải dựa vào sự tinh xảo của con người.
2.2. Công nghệ Cảm biến chủ đạo cho việc thu thập dữ liệu 6D
Việc thu thập dữ liệu 6D phải dựa trên các công nghệ cảm biến chiều sâu chuyên biệt, việc này đảm bảo độ chính xác hình học cần thiết. Cảm biến Lidar (hoặc ToF – Time-of-Flight) là công nghệ chủ đạo, việc này sử dụng xung ánh sáng để đo khoảng cách với độ chính xác cao và tạo ra đám mây điểm (point cloud data) chi tiết của vật thể.
Stereo Camera cũng là một phương pháp quan trọng, việc này sử dụng hai camera để tính toán độ sâu dựa trên sự khác biệt thị sai, việc này cung cấp tốc độ xử lý nhanh hơn, là cần thiết cho các hệ thống thời gian thực. Xu hướng nghiên cứu hiện nay là Fusion Cảm biến, việc này kết hợp dữ liệu RGB (màu sắc), Depth (chiều sâu) và IMU (đơn vị đo lường quán tính) để tăng cường độ chính xác và độ bền vững của Ước tính tư thế trong điều kiện môi trường thay đổi.

2.3. Các phương pháp biểu diễn Tư thế (Pose Representation)
Các phương pháp biểu diễn Tư thế là yếu tố cơ bản ảnh hưởng đến hiệu suất và tính ổn định của thuật toán Học sâu trong việc Ước tính tư thế 6D. Ma trận Quay (Rotation Matrix) 3×3 đại diện cho Định hướng của vật thể, việc này thuận tiện cho các phép biến đổi hình học nhưng có thể gây ra vấn đề về ràng buộc trực giao.
Quaternion là phương pháp ưu việt hơn, việc này sử dụng bốn tham số để mô tả Định hướng, việc này giải quyết vấn đề khóa gimbal (gimbal lock) và đảm bảo tính ổn định của mô hình trong quá trình huấn luyện. Vector Euler cung cấp sự minh bạch hóa trực quan nhưng có thể gặp sự gián đoạn trong một số góc quay nhất định.
Xu hướng nghiên cứu khuyến nghị sử dụng Quaternion để huấn luyện mô hình và chuyển đổi sang Ma trận Quay khi cần giao tiếp với hệ thống Robot cộng tác.
3. Xu Hướng Nghiên Cứu Tiên Tiến Về Ước Tính Tư Thế 6D
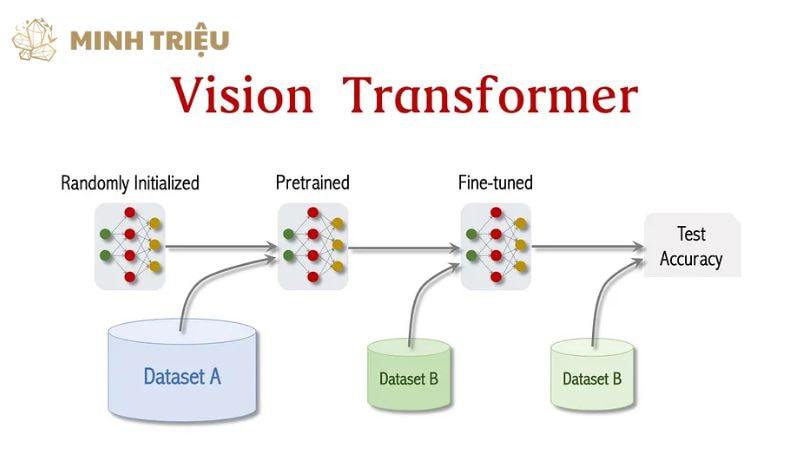
3.1. Học sâu và Kiến trúc Transformer cho 6D Vision
Học sâu là nền tảng cốt lõi thúc đẩy sự đột phá trong Ước tính tư thế 6D, đặc biệt là với sự ra đời của Vision Transformer (ViT). Kiến trúc ViTcung cấp một cơ chế xử lý hình ảnh vượt trội so với CNN truyền thống, việc này cho phép mô hình nắm bắt các mối quan hệ toàn cục (long-range dependencies) giữa các phần tử hình ảnh xa.
Ưu điểm này là rất quan trọng trong Thị giác máy 6D khi vật thể bị che khuất một phần (vật cản (Occlusion)) hoặc bị chồng chất (clutter), việc này giúp ViT Ước tính tư thế bền vững hơn bằng cách tận dụng ngữ cảnh của toàn bộ cảnh. Nghiên cứu mới đã chứng minh rằng ViT có thể tăng cường độ chính xác phân đoạn ảnh (segmentation) và Ước tính tư thế bằng cách hiểu được sự phân bố không gian của các đặc trưng thị giác.
3.2. Phương pháp Keypoint-Based và Direct Regression (Hồi quy Trực tiếp)
Các phương pháp Ước tính tư thế 6D được phân loại thành hai xu hướng nghiên cứu chính: Keypoint-Based và Direct Regression. Keypoint-Based là phương pháp xác định các điểm mốc (keypoints) 2D hoặc 3D đáng tin cậy trên vật thể, sau đó giải quyết bài toán PnP (Perspective-n-Point) để suy luận ra Vị trí và định hướng 6D. Phương pháp này có thể cung cấp tính Giải Thích (XAI) tốt hơn.
Ngược lại, Direct Regression là phương pháp trực tiếp dự đoán các tham số tư thế 6D (ví dụ: Quaternion và Tịnh tiến) từ hình ảnh đầu vào thông qua mạng Học sâu. Ưu điểm chính của Direct Regression là giảm thiểu Độ trễ suy luận (Inference) do loại bỏ bước trung gian PnP, việc này rất quan trọng cho các ứng dụng thời gian thực tại Edge AI.
3.3. Dữ liệu Tổng hợp (Synthetic Data) và Mô phỏng vật lý
Dữ liệu Tổng hợp (Synthetic Data) là chiến lược được sử dụng để khắc phục vấn đề thu thập dữ liệu gán nhãn 6D khó khăn và tốn kém trong thế giới thực. Công cụ tạo dữ liệu sử dụng các môi trường mô phỏng vật lý (ví dụ: Unity, Blender) để tạo ra các hình ảnh lỗi và dữ liệu gán nhãn Vị trí và định hướng 6D nhân tạo.
Quá trình này cho phép các nhà nghiên cứu tạo ra hàng ngàn biến thể của vật thể dưới các điều kiện ánh sáng, vật cản, và tư thế khác nhau. Dữ liệu Tổng hợp này được sử dụng để tiền huấn luyện mô hình Học sâu, việc này cải thiện đáng kể tính tổng quát hóa và độ bền vững của mô hình trước khi triển khai thực tế.
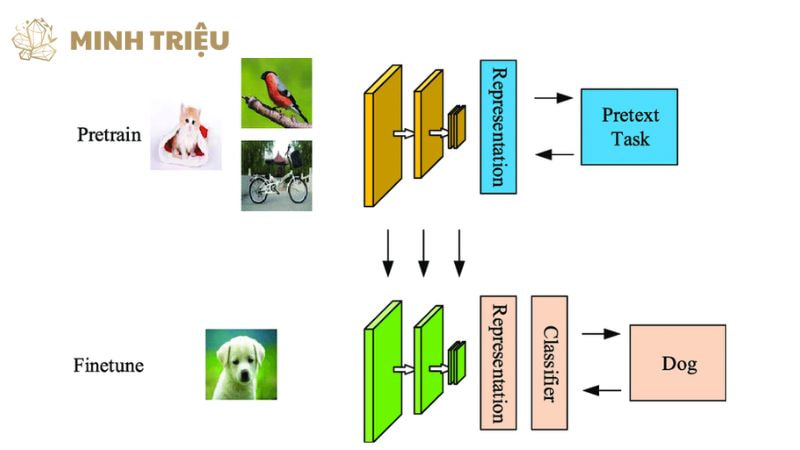
3.4. Nghiên cứu về Model-Free và Học Tự Giám sát (SSL) trong 6D
Nghiên cứu về Thị giác máy 6D đang tập trung vào việc giải quyết thách thức về dữ liệu gán nhãn khan hiếm thông qua Học Tự Giám sát (SSL) và khả năng Ước tính tư thế Model-Free. Model-Free là xu hướng nghiên cứu cho phép hệ thống Ước tính tư thế của các vật thể mới không có mô hình CAD 3D sẵn có, việc này tăng cường tính linh hoạt trong môi trường sản xuất đa dạng.
Học Tự Giám sát (SSL) đã trở thành giải pháp đột phá để khắc phục vấn đề Data Imbalance bằng cách sử dụng hàng triệu hình ảnh không nhãn để tiền huấn luyện mô hình Học sâu. Mô hình SSL tự học các đặc trưng thị giác mạnh mẽ, sau đó được tinh chỉnh (Fine-tune) bằng một lượng nhỏ dữ liệu gán nhãn 6D, việc này đảm bảo độ chính xác cao mà giảm thiểu đáng kể chi phí gán nhãn.
4. Ứng Dụng Đột Phá Của Thị Giác Máy 6D Trong Nhà Máy Thông Minh
4.1. Dẫn hướng Robot cộng tác (Cobots) trong Lắp Ráp Chính Xác
Thị giác máy 6D là công nghệ thiết yếu cung cấp khả năng dẫn hướng Robot cộng tác (Cobots) đạt độ chính xác tuyệt đối trong các tác vụ lắp ráp siêu chính xác. Robot cộng tác sử dụng Ước tính tư thế 6D thời gian thực để xác định Vị trí và định hướng của linh kiện cần gắp đặt và điều chỉnh đường đi của cánh tay robot để đạt được sự phù hợp hoàn hảo.
Ứng dụng thực tiễn này là chìa khóa để tự động hóa các công đoạn phức tạp trong sản xuất điện tử (ví dụ: cắm cáp, lắp chip), việc này đảm bảo độ chính xác micron và tối ưu hóa thời gian chu kỳ sản xuất, nâng cao hiệu suất vận hành (OEE).
4.2. Kiểm tra chất lượng Hình học và Phát hiện Lỗi Siêu Nhỏ
Thị giác máy 6D cho phép Kiểm tra chất lượng hình học một cách toàn diện và Phân tích Chi tiết Lỗi Siêu Nhỏ ở cấp độ micron. Công nghệ này sử dụng đám mây điểm 3D để định lượng độ sai lệch Vị trí và định hướng của các bộ phận so với mô hình CAD lý tưởng. Khả năng này là cần thiết để phát hiện lỗi như cong vênh, sai lệch góc hoặc mất cân bằng động.
Hệ thống Machine Vision 6D có thể cung cấp chỉ số suy thoái (Degradation Index) chi tiết, việc này giúp dự báo lỗi và theo dõi tiến trình suy thoái của sản phẩm theo thời gian, việc này tăng cường chất lượng và độ tin cậy.

4.3. Quản lý Kho Hàng Thông Minh và Bin Picking Ngẫu nhiên
Thị giác máy 6D là yếu tố then chốt cho phép tự động hóa hoàn toàn trong lĩnh vực kho hàng và logistics, đặc biệt là trong Bin Picking Ngẫu nhiên. Hệ thống 6D Vision có thể Ước tính tư thế chính xác của các vật thể được xếp lộn xộn (clutter) trong thùng chứa, việc này cho phép robot gắp đặt các vật thể một cách linh hoạt mà không cần sắp xếp trước.
Ứng dụng này giải quyết thách thức về tính ngẫu nhiên và vật cản phức tạp của môi trường kho hàng. Khả năng Ước tính tư thế nhanh chóng và chính xác giúp tối ưu hóa quy trình xếp dỡ, việc này cải thiện đáng kể hiệu suất vận hành của chuỗi cung ứng.
5. Thách Thức Triển Khai và Hướng Nghiên Cứu Tương Lai
5.1. Thách thức về Độ bền vững và Độ trễ suy luận (Inference)
Một thách thức lớn nhất trong việc triển khai Thị giác máy 6D là việc đảm bảo Độ bền vững của mô hình và Độ trễ suy luận (Inference) cực thấp. Môi trường sản xuất công nghiệp thường bị ảnh hưởng bởi các biến đổi về ánh sáng, bụi bẩn, và vật cản, việc này đòi hỏi mô hình Học sâu phải có khả năng duy trì độ chính xác Ước tính tư thế cao trong mọi điều kiện.
Yêu cầu về thời gian thực buộc các thuật toán Thị giác máy mới phải được tối ưu hóa mô hình cho Edge AI bằng các kỹ thuật như Lượng Tử Hóa (Quantization) và Cắt Tỉa (Pruning). Việc tích hợp Phần cứng Tăng tốc (VPU/FPGA) là cần thiết để giảm thiểu Độ trễ xuống dưới 10ms, việc này là bắt buộc cho Robot cộng tác hoạt động an toàn và hiệu quả.
5.2. Vấn đề Tính Giải Thích (XAI) và Sự tin cậy
Vấn đề Tính Giải Thích (XAI) là thách thức thiết yếu ảnh hưởng đến sự tin cậy của con người vào các ứng dụng Thị giác máy tiên tiến 6D. Bản chất “hộp đen” của các mô hình Học sâu khiến người vận hành khó hiểu tại sao hệ thống lại đưa ra một quyết định Ước tính tư thế cụ thể, việc này là rất quan trọng trong các tình huống an toàn hoặc Kiểm tra chất lượng nghiêm ngặt.
Nghiên cứu hiện nay đang tập trung vào việc tích hợp các kỹ thuật XAI như Grad-CAM để tạo ra bản đồ nhiệt (heatmaps). Bản đồ nhiệt này giúp trực quan hóa các khu vực hình ảnh mà mô hình Machine Vision đã dựa vào để suy luận ra Vị trí và định hướng, việc này tăng cường khả năng minh bạch hóa và sự tin cậy của hệ thống.
5.3. Hướng Nghiên Cứu Tương lai: Tích hợp Vision-Tactile
Hướng nghiên cứu tương lai cho Thị giác máy 6D là sự kết hợp giữa Vision (Thị giác) và Tactile (Xúc giác), việc này tạo ra mô hình đa phương thức toàn diện. Việc tích hợp Machine Vision 6D với cảm biến xúc giác và lực/mô-men xoắn (Force/Torque) trên cánh tay robot sẽ tăng cường độ chính xác và độ tin cậy cho các tác vụ lắp ráp tinh vi đòi hỏi sự tiếp xúc vật lý.
Cảm biến xúc giác cung cấp thông tin phản hồi thời gian thực về áp lực và ma sát, việc này bổ sung cho dữ liệu hình ảnh 6D. Hơn nữa, Học Tăng cường (RL) đang được nghiên cứu để tối ưu hóa các hành động của robot trong các tác vụ lắp ráp, việc này giúp robot tự học cách điều chỉnh tư thế dựa trên phần thưởng từ các tín hiệu cảm biến hỗn hợp.
6. Kết Luận
Thị giác máy 6D đã khẳng định vị thế chiến lược của mình như trụ cột cốt lõi của tự động hóa sản xuất trong kỷ nguyên Công nghiệp 4.0. Công nghệ này không chỉ cung cấp khả năng Ước tính tư thế chính xác (Vị trí và định hướng) là cần thiết cho Robot cộng tác mà còn tạo ra cơ sở dữ liệu hình ảnh chi tiết cho Phân tích Chi tiết Lỗi Siêu Nhỏ và dự báo lỗi sớm.
Xu hướng nghiên cứu mới, bao gồm ViT và Học Tự Giám sát (SSL), đang giải quyết các thách thức về độ bền vững và sự khan hiếm của dữ liệu gán nhãn, việc này mở ra khả năng triển khai các hệ thống Machine Vision tổng quát hóa và tin cậy hơn.