
Thị giác máy (Machine Vision)
Biến đổi hình học trong Machine Vision: Công cụ cốt lõi cho căn chỉnh và phân tích chính xác

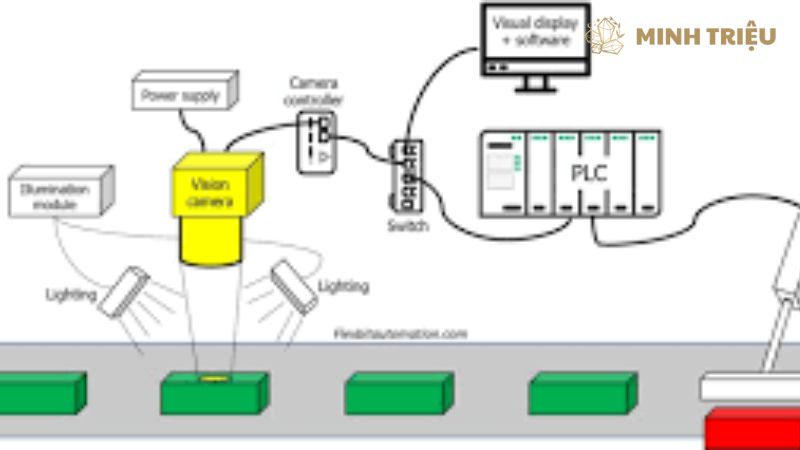
Machine Vision đóng vai trò là một công nghệ cốt lõi trong ngành sản xuất công nghiệp, nơi nó mang lại khả năng kiểm tra tự động và giám sát chất lượng sản phẩm. Các hệ thống này hoạt động dựa trên việc thu thập và phân tích dữ liệu hình ảnh. Tuy nhiên, dữ liệu hình ảnh thu được trong môi trường công nghiệp thường không hoàn hảo. Chúng có thể bị lệch, méo hoặc nghiêng. Điều này gây khó khăn cho việc kiểm tra chất lượng và đo lường chính xác. Các thuật toán Machine Vision cần một hình ảnh được chuẩn hóa. Việc này để chúng có thể thực hiện các phân tích một cách nhất quán.
Bài viết này phân tích vai trò của biến đổi hình học (geometric transformations). Chúng là một kỹ thuật tiền xử lý ảnh thiết yếu. Điều này giúp doanh nghiệp hiểu cách chúng được sử dụng để chuẩn hóa dữ liệu hình ảnh. Chúng ta sẽ khám phá các loại biến đổi hình học chính, từ cơ bản đến phức tạp.
1. Biến đổi hình học là gì và tại sao nó lại quan trọng?
Biến đổi hình học là một quá trình. Nó thay đổi vị trí, kích thước hoặc hình dạng của các điểm ảnh trong một hình ảnh. Mục tiêu chính là để hình ảnh được chuẩn hóa. Các biến đổi này chuyển đổi hình ảnh từ hệ tọa độ này sang hệ tọa độ khác. Điều này làm cho hình ảnh dễ phân tích hơn. Quá trình này không làm thay đổi nội dung của hình ảnh. Nó chỉ sắp xếp lại các điểm ảnh. Việc này đảm bảo rằng các đối tượng được hiển thị một cách nhất quán.
Các biến đổi này chuẩn hóa hình ảnh. Nó giúp đưa hình ảnh về một hệ tọa độ tiêu chuẩn. Việc này giải quyết các vấn đề do vị trí và góc nhìn thay đổi của camera. Một sản phẩm trên băng chuyền có thể bị xoay hoặc đặt sai vị trí. Nếu không được chuẩn hóa, hệ thống Machine Vision sẽ gặp khó khăn. Nó không thể so sánh hình ảnh của sản phẩm với một mẫu chuẩn. Biến đổi hình học giúp khắc phục điều này. Nó cho phép các thuật toán Machine Vision so sánh và phân tích một cách nhất quán.

Nó là một bước tiền xử lý ảnh quan trọng. Nó giải quyết các vấn đề do vị trí và góc nhìn thay đổi của camera. Việc này đảm bảo rằng các phép đo lường và phân tích tiếp theo được chính xác. Ví dụ, một camera giám sát từ một góc nghiêng sẽ làm cho các vật thể ở xa trông nhỏ hơn. Biến đổi hình học giúp hiệu chỉnh hình ảnh. Nó làm cho tất cả các vật thể trông có kích thước thật. Điều này giúp các phép đo lường được chính xác.
2. Các loại biến đổi hình học chính
Các phép biến đổi hình học khác nhau được sử dụng tùy thuộc vào loại biến dạng cần được hiệu chỉnh.
2.1. Phép tịnh tiến (Translation)
Phép tịnh tiến là một phép biến đổi đơn giản. Nó di chuyển tất cả các điểm ảnh trong hình ảnh theo một hướng và khoảng cách cố định. Phép biến đổi này được xác định bởi một vectơ. Vectơ này chứa các giá trị dịch chuyển theo trục x và y. Phép tịnh tiến giúp căn chỉnh hình ảnh của một đối tượng bị lệch vị trí. Ví dụ, một camera có thể chụp một sản phẩm không nằm chính giữa khung hình. Phép tịnh tiến sẽ dịch chuyển hình ảnh để sản phẩm nằm chính giữa. Điều này giúp các thuật toán tiếp theo dễ dàng xử lý.
2.2. Phép quay (Rotation)
Phép quay là một phép biến đổi. Nó xoay hình ảnh quanh một điểm trung tâm. Phép quay được xác định bởi một góc quay. Phép này giúp chuẩn hóa hình ảnh của các đối tượng bị xoay trên băng chuyền. Ví dụ, các chai nước có thể được đặt trên băng chuyền ở các góc khác nhau. Phép quay sẽ xoay tất cả các hình ảnh về một góc tiêu chuẩn. Điều này cho phép hệ thống tầm nhìn máy kiểm tra nhãn hoặc nắp chai một cách nhất quán.
2.3. Phép co giãn (Scaling)
Phép co giãn là một phép biến đổi. Nó thay đổi kích thước của hình ảnh. Phép này được xác định bởi các yếu tố co giãn. Các yếu tố này áp dụng cho trục x và y. Phép co giãn được sử dụng để chuẩn hóa kích thước của các đối tượng. Ví dụ, các sản phẩm có thể có cùng loại. Tuy nhiên, chúng có kích thước khác nhau. Phép này giúp chuẩn hóa kích thước của tất cả các sản phẩm. Điều này giúp các thuật toán so sánh chúng dễ dàng hơn.
2.4. Phép biến dạng (Shear)
Phép biến dạng là một phép biến đổi. Nó biến dạng hình ảnh theo một hướng. Phép này thường được sử dụng để điều chỉnh méo hình ảnh do góc nhìn nghiêng. Phép biến dạng giữ lại các đường thẳng song song. Tuy nhiên, nó làm thay đổi các góc. Phép này được sử dụng để điều chỉnh méo hình ảnh do góc nhìn nghiêng.
2.5. Phép biến đổi Affine
Phép biến đổi Affine là một phép biến đổi phức tạp. Nó là một sự kết hợp của tịnh tiến, quay, co giãn và biến dạng. Phép biến đổi này được biểu diễn bằng một ma trận 2×3. Phép biến đổi Affine giữ lại các đường thẳng song song. Tuy nhiên, nó không giữ lại các góc và độ dài. Phép biến đổi Affine xử lý các thay đổi tổng quát hơn về vị trí, hướng và kích thước. Nó rất hữu ích cho các ứng dụng. Nó cần xử lý hình ảnh phức tạp.
2.6. Phép biến đổi phối cảnh (Perspective Transformation)
Phép biến đổi phối cảnh là một phép biến đổi phức tạp nhất. Nó biến đổi hình ảnh để mô phỏng một phối cảnh 3D. Phép biến đổi này được biểu diễn bằng một ma trận 3×3. Nó không giữ lại các đường thẳng song song. Phép biến đổi này được sử dụng để hiệu chỉnh độ méo của hình ảnh do góc nhìn xa gần. Điều này làm cho hình ảnh trông như được chụp từ một góc “nhìn thẳng”. Điều này giúp các phép đo lường và phân tích được chính xác.
3. Ứng dụng của biến đổi hình học trong sản xuất công nghiệp
Biến đổi hình học có nhiều ứng dụng quan trọng trong sản xuất công nghiệp. Nó giải quyết các vấn đề liên quan đến sự không nhất quán của dữ liệu hình ảnh.
3.1. Kiểm tra chất lượng và phát hiện lỗi
Vấn đề là các sản phẩm không đồng nhất về vị trí. Chúng có thể bị xoay hoặc đặt sai. Điều này gây khó khăn cho việc kiểm tra chất lượng tự động.
Giải pháp là sử dụng biến đổi hình học để chuẩn hóa vị trí và hướng. Sau đó, nó cho phép các thuật toán Machine Vision so sánh sản phẩm với một mẫu chuẩn. Ví dụ, một camera chụp ảnh một sản phẩm. Biến đổi hình học sẽ xoay và dịch chuyển hình ảnh. Điều này làm cho sản phẩm trong hình ảnh khớp hoàn toàn với mẫu chuẩn. Sau đó, thuật toán Machine Vision có thể dễ dàng so sánh hai hình ảnh. Nó có thể tìm ra các lỗi nhỏ như vết nứt hoặc trầy xước.
3.2. Đo lường chính xác
Vấn đề là phép đo lường trên hình ảnh bị sai lệch. Nó do góc nhìn của camera.
Giải pháp là sử dụng biến đổi hình học để hiệu chỉnh. Nó tạo ra một hình ảnh “nhìn thẳng” từ trên xuống. Điều này cho phép các phép đo lường chính xác. Ví dụ, một camera giám sát từ một góc nghiêng. Nó cần đo đường kính của một vật thể tròn. Phép đo này sẽ không chính xác. Biến đổi hình học sẽ hiệu chỉnh hình ảnh. Nó làm cho vật thể trông tròn. Điều này cho phép đo đường kính chính xác.
3.3. Tự động hóa robot
Vấn đề là robot cần thông tin tọa độ chính xác của các đối tượng. Tọa độ của đối tượng trong hình ảnh không giống với tọa độ trong thế giới thực.
Giải pháp là biến đổi hình học chuyển đổi tọa độ điểm ảnh. Nó chuyển từ hệ tọa độ của camera sang hệ tọa độ của robot. Điều này giúp robot gắp và đặt đối tượng chính xác. Đây là một bước lập trình quan trọng. Nó giúp robot có thể tự động hóa các tác vụ phức tạp.
3.4. Căn chỉnh sản phẩm
Vấn đề là các thành phần cần được căn chỉnh một cách chính xác. Các hệ thống Machine Vision cần hướng dẫn các thiết bị khác thực hiện việc này.
Giải pháp là sử dụng biến đổi hình học để điều chỉnh hình ảnh. Nó giúp các thuật toán Machine Vision hướng dẫn robot thực hiện căn chỉnh. Ví dụ, một robot cần đặt một linh kiện trên một bảng mạch. Biến đổi hình học sẽ xác định vị trí chính xác của linh kiện. Sau đó, nó sẽ chuyển đổi tọa độ đó. Tọa độ được chuyển đổi sang hệ tọa độ của robot. Điều này giúp robot đặt linh kiện đúng vị trí.
4. Các công cụ và thư viện hỗ trợ
Việc thực hiện các phép biến đổi hình học không cần lập trình từ đầu. Có nhiều công cụ và thư viện hỗ trợ.

- OpenCV: Một thư viện xử lý ảnh mã nguồn mở mạnh mẽ. Nó cung cấp các hàm để thực hiện nhiều loại biến đổi hình học. Nó được sử dụng rộng rãi trong các ứng dụng Machine Vision. Nó có thể thực hiện tất cả các phép biến đổi đã được thảo luận ở trên.
- Scikit-image (Python): Một thư viện Python. Nó cung cấp các công cụ dễ sử dụng cho tiền xử lý ảnh. Nó rất phổ biến trong cộng đồng khoa học dữ liệu.
- MATLAB: Một nền tảng tính toán khoa học. Nó có các công cụ mạnh mẽ để thực hiện các phép biến đổi hình học. Nó rất phù hợp cho các nhà nghiên cứu và kỹ sư.
5. Kết luận
Biến đổi hình học là một kỹ thuật nền tảng trong Machine Vision. Nó giải quyết các vấn đề liên quan đến vị trí và góc nhìn. Nó đảm bảo sự nhất quán và độ chính xác của dữ liệu hình ảnh. Việc này giúp các thuật toán Machine Vision hoạt động hiệu quả hơn. Việc áp dụng đúng các kỹ thuật này là rất cần thiết. Nó giúp các doanh nghiệp xây dựng các hệ thống tầm nhìn máy đáng tin cậy. Điều này giúp tăng năng suất và giảm chi phí. Nó cũng là một bước quan trọng. Nó giúp tự động hóa các quy trình kiểm tra chất lượng và lắp ráp. Việc kết hợp các phương pháp này với các kỹ thuật Học sâu sẽ tạo ra các giải pháp mạnh mẽ hơn.