
Robot công nghiệp
Vượt Qua Giới Hạn Về Tốc Độ Và Độ Chính Xác: Nâng Tầm Cánh Tay Robot Trong Sản Xuất Công Nghiệp

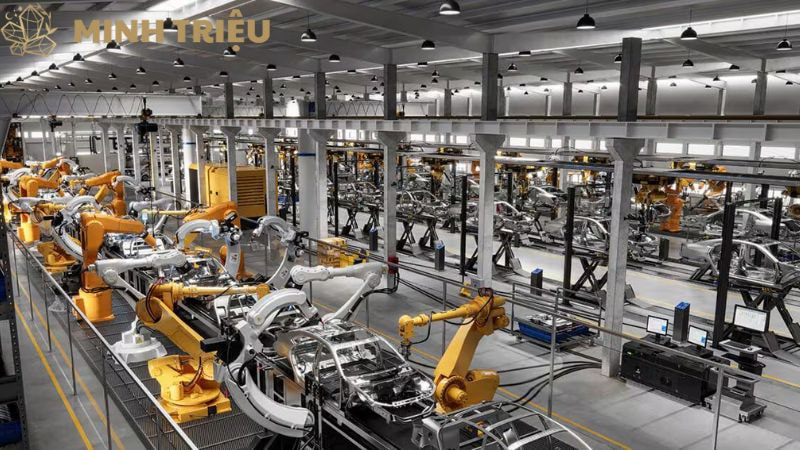
Cánh tay robot trong sản xuất công nghiệp đóng vai trò xương sống trong các dây chuyền sản xuất hiện đại, thực hiện vô số tác vụ từ lắp ráp, hàn, cắt gọt đến đóng gói với hiệu suất ấn tượng. Tuy nhiên, trong bối cảnh công nghiệp 4.0 và xu hướng sản xuất thông minh đang định hình lại toàn bộ ngành công nghiệp, yêu cầu về hiệu suất robot ngày càng trở nên khắt khe, đặc biệt là về tốc độ robot và độ chính xác robot.
Việc vượt qua giới hạn về tốc độ và độ chính xác không chỉ là một thách thức kỹ thuật mà còn là mục tiêu chiến lược để tối ưu hóa thời gian chu kỳ, nâng cao chất lượng sản phẩm, và cải thiện hiệu quả sản xuất tổng thể. Để đạt được những bước tiến đột phá này, các nhà nghiên cứu và kỹ sư robot đang tập trung vào việc cải tiến từ thiết kế cơ khí, hệ thống điều khiển đến việc tích hợp các công nghệ thông minh như trí tuệ nhân tạo (AI) và học máy (Machine Learning).
Bài viết này sẽ đi sâu phân tích tầm quan trọng của tốc độ và độ chính xác trong robot công nghiệp, khám phá các yếu tố ảnh hưởng, trình bày những giải pháp công nghệ tiên tiến đang được áp dụng để khắc phục giới hạn, nêu bật các ứng dụng thực tế mang lại lợi ích rõ rệt, đồng thời thảo luận về những thách thức còn tồn tại và triển vọng phát triển trong tương lai của lĩnh vực này.
1. Tầm Quan Trọng Của Tốc Độ Và Độ Chính Xác Trong Robot Công Nghiệp
Tốc độ robot và độ chính xác robot là hai yếu tố then chốt quyết định hiệu suất robot và khả năng cạnh tranh của cánh tay robot trong sản xuất công nghiệp.
1.1. Tăng cường năng suất và giảm thời gian chu kỳ
Tốc độ robot cao trực tiếp dẫn đến việc rút ngắn thời gian chu kỳ sản xuất cho mỗi đơn vị sản phẩm. Khi robot có thể hoàn thành tác vụ nhanh hơn, tổng số sản phẩm được tạo ra trong một khoảng thời gian nhất định sẽ tăng lên đáng kể, từ đó đóng góp vào việc tăng năng suất tổng thể của dây chuyền tự động hóa. Trong các ngành công nghiệp đòi hỏi sản lượng lớn như ô tô, điện tử tiêu dùng, hoặc thực phẩm, mỗi giây tiết kiệm được trong thời gian chu kỳ đều có thể mang lại lợi ích kinh tế khổng lồ.

1.2. Nâng cao chất lượng sản phẩm và giảm lỗi
Độ chính xác robot là yếu tố quyết định để đảm bảo các tác vụ được thực hiện một cách đồng nhất và không có sai sót. Khác với lao động thủ công, robot có khả năng lặp lại chuyển động với sai số cực nhỏ, loại bỏ các lỗi do yếu tố con người như mệt mỏi hay thiếu tập trung. Điều này góp phần trực tiếp vào việc sản xuất ra chất lượng sản phẩm cao hơn, đồng đều hơn và giảm đáng kể tỷ lệ phế phẩm hoặc sản phẩm cần làm lại, từ đó tiết kiệm nguyên vật liệu và chi phí.
1.3. Tối ưu hóa hiệu quả sản xuất và chi phí
Việc cải thiện hiệu suất robot thông qua tăng cả tốc độ và độ chính xác trực tiếp dẫn đến việc sử dụng tài nguyên hiệu quả hơn. Với tốc độ robot cao, các tác vụ được hoàn thành nhanh hơn, giảm thời gian chiếm dụng máy và cho phép tối ưu hóa luồng vật liệu. Độ chính xác robot giúp giảm lãng phí nguyên vật liệu do lỗi sản xuất. Tổng hòa lại, điều này làm giảm chi phí sản xuất trên mỗi đơn vị sản phẩm, nâng cao hiệu quả sản xuất và tăng lợi nhuận cho doanh nghiệp.
1.4. Đáp ứng yêu cầu của sản xuất hiện đại (Công nghiệp 4.0)
Trong kỷ nguyên Công nghiệp 4.0, các nhà máy thông minh đòi hỏi sự linh hoạt và khả năng thích ứng cao từ các hệ thống tự động hóa. Robot công nghiệp phải có khả năng thực hiện các tác vụ phức tạp với tốc độ và độ chính xác vượt trội để xử lý các biến thể sản phẩm, chuyển đổi nhanh chóng giữa các dây chuyền và tích hợp liền mạch vào các hệ thống quản lý sản xuất thông minh. Khả năng vượt qua giới hạn về tốc độ và độ chính xác là tiền đề để hiện thực hóa sản xuất thông minh và sản xuất tùy biến.
2. Các Yếu Tố Ảnh Hưởng Đến Tốc Độ Và Độ Chính Xác Của Robot
Để vượt qua giới hạn về tốc độ và độ chính xác, việc hiểu rõ các yếu tố cốt lõi ảnh hưởng đến hiệu suất robot là điều cần thiết.
2.1. Cấu trúc cơ khí và vật liệu
Cấu trúc robot đóng vai trò cực kỳ quan trọng đối với cả tốc độ robot và độ chính xác robot. Một cấu trúc không đủ cứng vững sẽ dẫn đến độ võng và rung động khi robot di chuyển ở tốc độ cao, làm giảm độ chính xác của vị trí cuối. Các khớp nối và cơ cấu truyền động cũng cần được thiết kế robot sao cho giảm thiểu độ rơ và ma sát. Việc sử dụng vật liệu nhẹ nhưng có độ bền cao như hợp kim nhôm, titan, hoặc vật liệu composite giúp giảm quán tính của các chi tiết chuyển động, cho phép robot tăng tốc và giảm tốc nhanh hơn mà vẫn duy trì độ cứng vững cần thiết.

2.2. Hệ thống truyền động và động cơ
Chất lượng và khả năng đáp ứng của động cơ servo là yếu tố quyết định tốc độ và lực của robot. Động cơ phải có khả năng tạo ra mô-men xoắn lớn trong thời gian ngắn để robot đạt được gia tốc cao. Bên cạnh đó, độ chính xác của hộp số và các cơ cấu truyền động (như dây đai, bánh răng) cũng ảnh hưởng trực tiếp đến độ chính xác robot cuối cùng, vì mọi sai số tích lũy trong hệ thống truyền động sẽ được truyền đến bộ công tác.
2.3. Cảm biến và hệ thống phản hồi
Độ phân giải và tốc độ của bộ mã hóa (encoders) gắn ở mỗi khớp là cơ sở để hệ thống điều khiển robot biết chính xác vị trí và tốc độ hiện tại của các khớp. Ngoài ra, việc sử dụng cảm biến robot bổ sung như cảm biến lực/mô-men xoắn trên cổ tay robot hoặc thị giác máy tính (Computer Vision) cho robot (ví dụ: camera 2D, 3D) cho phép robot thu thập thông tin chi tiết về môi trường và đối tượng làm việc, từ đó cải thiện độ chính xác robot trong các tác vụ phức tạp hoặc khi đối tượng không được đặt ở vị trí cố định. Hệ thống phản hồi đa giác quan này giúp robot bù trừ các sai lệch và điều chỉnh hành vi trong thời gian thực.
2.4. Thuật toán điều khiển robot
Các thuật toán điều khiển tiên tiến là trái tim của hệ thống robot, trực tiếp ảnh hưởng đến khả năng đạt được tốc độ và độ chính xác cao. Từ các bộ điều khiển PID truyền thống đến các phương pháp phức tạp hơn như điều khiển thích nghi (Adaptive Control), điều khiển dự báo mô hình (Model Predictive Control – MPC), hay điều khiển lực (Force Control), mỗi thuật toán đều có mục tiêu tối ưu hóa quỹ đạo chuyển động, giảm rung động, và bù trừ các sai số động lực học. Khả năng tính toán và phản ứng của bộ điều khiển quyết định mức độ robot có thể khai thác tối đa tiềm năng cơ khí.
2.5. Phương pháp lập trình và hiệu chuẩn
Hiệu chuẩn robot định kỳ là cần thiết để duy trì độ chính xác robot theo thời gian, bù trừ hao mòn cơ khí và sai lệch cảm biến. Bên cạnh đó, phương pháp lập trình robot cũng ảnh hưởng lớn. Việc tối ưu hóa quỹ đạo chuyển động, tránh các điểm dừng không cần thiết, và sử dụng các lệnh điều khiển chính xác có thể giúp robot đạt được tốc độ robot cao hơn mà vẫn đảm bảo độ chính xác yêu cầu cho từng tác vụ cụ thể.
2.6. Môi trường hoạt động
Môi trường hoạt động cũng có thể ảnh hưởng đến hiệu suất robot. Nhiệt độ quá cao hoặc quá thấp có thể ảnh hưởng đến các linh kiện điện tử và cơ khí. Độ rung từ các máy móc lân cận, bụi bẩn, hoặc độ ẩm cao cũng có thể làm giảm độ chính xác robot và tuổi thọ của hệ thống. Việc kiểm soát môi trường là một phần quan trọng để duy trì hiệu suất ổn định.

3. Các Giải Pháp Công Nghệ Để Vượt Qua Giới Hạn
Để thực sự vượt qua giới hạn về tốc độ và độ chính xác của cánh tay robot, ngành công nghiệp đang đầu tư vào nhiều giải pháp công nghệ tiên tiến khác nhau.
3.1. Cải tiến thiết kế cơ khí và vật liệu
Thiết kế robot đang ngày càng trở nên tối ưu hóa hơn để đạt được độ cứng vững cao nhất với khối lượng tối thiểu. Các nhà sản xuất đang ứng dụng rộng rãi vật liệu nhẹ tiên tiến như composite sợi carbon hoặc các hợp kim nhôm-magiê đặc biệt, giúp giảm quán tính của các khớp và cánh tay, cho phép tăng tốc độ và giảm rung động. Bên cạnh đó, công nghệ sản xuất bồi đắp (in 3D) đang được sử dụng để tạo ra các cấu trúc phức tạp với hình học được tối ưu hóa, vừa nhẹ vừa cứng vững, vượt trội so với các phương pháp sản xuất truyền thống.
3.2. Phát triển hệ thống điều khiển robot tiên tiến
Trọng tâm của việc nâng cao hiệu suất robot nằm ở các thuật toán điều khiển tiên tiến. Các phương pháp như điều khiển thích nghi (Adaptive Control) cho phép robot tự điều chỉnh tham số để đối phó với thay đổi về tải trọng hoặc điều kiện môi trường.
Điều khiển dự báo mô hình (Model Predictive Control – MPC) giúp robot lập kế hoạch chuyển động tối ưu dựa trên mô hình động lực học của nó và các giới hạn về tốc độ, lực. Điều khiển lực (Force Control) sử dụng phản hồi lực từ cảm biến lực/mô-men xoắn để robot thực hiện các tác vụ tiếp xúc tinh tế như lắp ráp chính xác. Ngoài ra, điều khiển học (Learning Control) đang được nghiên cứu để robot có thể tự cải thiện độ chính xác robot theo thời gian qua các lần lặp lại tác vụ.
3.3. Tích hợp cảm biến thông minh và phản hồi đa giác quan
Việc trang bị cho robot các cảm biến robot thông minh là chìa khóa. Cảm biến lực/mô-men xoắn trên cổ tay robot cho phép robot cảm nhận lực tương tác với môi trường, thực hiện các tác vụ lắp ráp tinh xảo như ép khớp, vặn ốc với lực kiểm soát. Thị giác máy tính (Computer Vision) cho robot (cả 2D và 3D) cung cấp khả năng định vị đối tượng chính xác trong không gian 3D, nhận diện các chi tiết nhỏ, và thực hiện kiểm tra chất lượng tự động. Hệ thống phản hồi từ các cảm biến bên ngoài (ví dụ: laser trackers, camera ngoài) cũng được sử dụng để cung cấp thông tin vị trí chính xác hơn, giúp robot bù trừ sai lệch và đạt được độ chính xác robot cao hơn nữa.
3.4. Ứng dụng Trí tuệ nhân tạo (AI) và Học máy (Machine Learning)
Trí tuệ nhân tạo (AI) cho robot đang cách mạng hóa khả năng tối ưu hóa quỹ đạo và ra quyết định thời gian thực của robot. Các kỹ thuật học máy (Machine Learning) cho robot, đặc biệt là học tăng cường (Reinforcement Learning), cho phép robot tự học cách tối ưu hóa chuyển động để đạt được tốc độ robot cao nhất và độ chính xác robot cần thiết thông qua quá trình thử và lỗi trong môi trường mô phỏng hoặc thực tế. Ngoài ra, học từ trình diễn (Learning from Demonstration) đang đơn giản hóa việc lập trình robot, cho phép robot học các tác vụ phức tạp chỉ bằng cách quan sát con người thực hiện.

3.5. Công nghệ hiệu chuẩn và bù sai số tự động
Để duy trì độ chính xác robot qua thời gian, các hệ thống hiệu chuẩn tự động đang được phát triển. Sử dụng thiết bị đo lường laser, quang học độ chính xác cao, robot có thể tự động kiểm tra và hiệu chuẩn lại các thông số động học và động lực học của mình. Song song đó, các thuật toán bù sai số online (trong thời gian thực) và offline (ngoại tuyến) liên tục điều chỉnh quỹ đạo hoặc vị trí điểm cuối để bù trừ các sai lệch do nhiệt độ, tải trọng, hoặc hao mòn cơ khí, đảm bảo hiệu suất robot ổn định ở độ chính xác robot cao nhất.
3.6. Tối ưu hóa lập trình và mô phỏng (Simulation & Offline Programming)
Phần mềm mô phỏng robot tiên tiến là công cụ không thể thiếu để vượt qua giới hạn về tốc độ và độ chính xác. Chúng cho phép kỹ sư robot tối ưu hóa quỹ đạo chuyển động của robot trong môi trường ảo, phát hiện và loại bỏ các va chạm, và tính toán thời gian chu kỳ tối ưu trước khi triển khai thực tế. Lập trình robot ngoại tuyến (offline programming) giúp giảm đáng kể thời gian ngừng hoạt hoạt động của robot trong nhà máy, vì chương trình có thể được phát triển và kiểm thử hoàn toàn trong môi trường ảo.
4. Ứng Dụng Thực Tế Và Lợi Ích
Các giải pháp vượt qua giới hạn về tốc độ và độ chính xác đang mang lại những lợi ích thiết thực trong nhiều ngành công nghiệp khác nhau.
4.1. Lắp ráp chính xác cao
Trong các ngành như sản xuất điện tử, robot được sử dụng để lắp ráp các linh kiện siêu nhỏ với độ chính xác robot micromet, điều mà mắt thường và tay người khó lòng thực hiện được. Trong sản xuất thiết bị y tế hoặc dược phẩm, robot đảm bảo độ chính xác và vô trùng tuyệt đối. Lợi ích rõ rệt là tăng chất lượng sản phẩm, giảm đáng kể lỗi do lắp ráp thủ công, và đảm bảo tuân thủ các tiêu chuẩn nghiêm ngặt.
4.2. Gia công cơ khí tốc độ cao
Cánh tay robot với tốc độ robot cao và độ chính xác robot vượt trội được ứng dụng trong các tác vụ cắt gọt, hàn, phay, hoặc mài. Ví dụ, robot có thể thực hiện hàn laser tốc độ cao hoặc gia công các chi tiết phức tạp với dung sai cực nhỏ. Điều này giúp rút ngắn thời gian chu kỳ sản xuất đáng kể, tăng hiệu quả sản xuất và cho phép xử lý các vật liệu cứng hoặc hình dạng phức tạp một cách hiệu quả.

4.3. Kiểm tra chất lượng và đo lường tự động
Sử dụng thị giác máy tính (Computer Vision) cho robot và các cảm biến robot khác, robot có thể tự động kiểm tra chất lượng bề mặt, đo lường kích thước chi tiết với độ chính xác cao, và phát hiện các lỗi sản phẩm nhanh chóng hơn nhiều so với con người. Ứng dụng này đảm bảo chất lượng sản phẩm đồng đều trên toàn bộ lô hàng và cung cấp dữ liệu tức thời cho việc cải tiến quy trình.
4.4. Thao tác vật liệu và đóng gói tốc độ cao
Trong ngành thực phẩm, dược phẩm, hoặc logistics, các robot pick-and-place với tốc độ robot cực nhanh có thể phân loại, nhặt và đặt hàng ngàn vật phẩm mỗi giờ. Khả năng này giúp tăng năng suất đáng kể trong các khâu đóng gói và xử lý vật liệu, đồng thời giảm hao hụt sản phẩm do thao tác sai hoặc hư hỏng.
4.5. Vượt qua giới hạn trong sản xuất pin và ô tô điện
Sản xuất pin cho xe điện đòi hỏi độ chính xác robot cực cao trong quá trình lắp ráp các cell pin, module và pack pin để đảm bảo hiệu suất và an toàn. Robot có khả năng thực hiện các tác vụ này với độ lặp lại và chính xác vượt trội, là yếu tố then chốt cho sự phát triển của ngành công nghiệp ô tô điện.
| Ngành Ứng Dụng | Ví Dụ Tác Vụ Robot | Lợi Ích Cụ Thể |
|---|---|---|
| Điện tử | Lắp ráp linh kiện siêu nhỏ | Tăng chất lượng sản phẩm, giảm lỗi |
| Ô tô | Hàn điểm, sơn, lắp ráp động cơ | Rút ngắn thời gian chu kỳ, hiệu quả sản xuất cao |
| Y tế/Dược phẩm | Lắp ráp thiết bị y tế, đóng gói thuốc | Độ chính xác robot cao, vô trùng, giảm lỗi |
| Thực phẩm & Đồ uống | Pick-and-place tốc độ cao, đóng gói | Tăng năng suất, giảm hao hụt |
| Gia công kim loại | Cắt laser, phay CNC | Độ chính xác robot, tốc độ robot vượt trội |
5. Thách Thức Và Triển Vọng Tương Lai
Mặc dù có nhiều bước tiến, việc vượt qua giới hạn về tốc độ và độ chính xác vẫn đối mặt với những thách thức đáng kể, nhưng triển vọng tương lai là rất hứa hẹn.
5.1. Thách thức
Một trong những thách thức lớn là chi phí R&D robot và triển khai các công nghệ tiên tiến, đòi hỏi đầu tư đáng kể vào nghiên cứu và phát triển. Các thuật toán điều khiển tiên tiến và ứng dụng AI yêu cầu năng lực tính toán lớn, đặt ra gánh nặng cho phần cứng. Việc tích hợp nhiều loại cảm biến robot và hệ thống phức tạp cũng đòi hỏi kỹ thuật cao và thời gian. Đảm bảo an toàn robot khi tốc độ robot tăng cao là một mối quan ngại lớn, vì chuyển động nhanh và lực lớn có thể gây nguy hiểm cho con người nếu không có biện pháp bảo vệ phù hợp. Cuối cùng, thiếu hụt kỹ sư robot và chuyên gia robot có kỹ năng liên ngành (cơ khí, điện tử, điều khiển, AI) là một rào cản lớn cho sự phát triển.
5.2. Triển vọng tương lai
Tương lai của công nghệ robot trong sản xuất đang hướng tới những đột phá lớn. Robot thế hệ mới sẽ có khả năng tự điều chỉnh và tự học cao hơn, liên tục cải thiện hiệu suất robot của mình thông qua kinh nghiệm. Sự tích hợp sâu hơn của AI và Machine Learning vào mọi khía cạnh của công nghệ robot, từ lập kế hoạch chuyển động đến xử lý lỗi, sẽ tạo ra các robot thông minh thực sự. Việc phát triển cảm biến robot thông minh hơn, đa giác quan và tích hợp (ví dụ: cảm biến da robot) sẽ cung cấp cho robot khả năng nhận biết môi trường chi tiết và tinh tế hơn. Xu hướng robot mềm (Soft Robotics) đang nổi lên, hứa hẹn kết hợp tốc độ và độ chính xác với sự an toàn và linh hoạt chưa từng có. Cuối cùng, khái niệm “Digital Twin” và mô phỏng robot thời gian thực sẽ trở nên phổ biến, cho phép tối ưu hóa liên tục các hệ thống robot trong môi trường ảo, từ đó cải thiện hiệu suất robot trong thế giới thực.
6. Kết Luận
Việc vượt qua giới hạn về tốc độ và độ chính xác là mục tiêu cốt lõi và không ngừng nghỉ để nâng cao hiệu suất robot trong sản xuất công nghiệp. Điều này không chỉ đơn thuần là cải thiện khả năng của máy móc mà còn là động lực để thúc đẩy năng suất, nâng cao chất lượng sản phẩm, và giảm chi phí sản xuất trong kỷ nguyên nhà máy thông minh. Sự kết hợp chặt chẽ giữa thiết kế robot tiên tiến, điều khiển robot thông minh, cảm biến robot đa giác quan, và đặc biệt là sức mạnh của trí tuệ nhân tạo (AI) cho robot và học máy (Machine Learning) cho robot đang là chìa khóa để đạt được những bước đột phá này. Để khai thác toàn bộ tiềm năng của cánh tay robot trong sản xuất thông minh, cần khuyến khích đầu tư mạnh mẽ vào R&D robot, đào tạo nguồn nhân lực chất lượng cao (các kỹ sư robot và chuyên gia robot), và thúc đẩy đổi mới robot không ngừng. Chỉ khi đó, chúng ta mới có thể định hình một tương lai sản xuất với hiệu quả sản xuất vượt trội, chất lượng sản phẩm tối ưu, và sự phát triển bền vững của ngành công nghệ robot toàn cầu.