
Robot công nghiệp
Nguyên lý động lực học robot (dynamics): Nền Tảng Vận Hành Robot Công Nghiệp
Động lực học robot là lĩnh vực nghiên cứu cốt lõi xác định mối quan hệ giữa lực, mô-men xoắn, khối lượng và gia tốc của robot, đóng vai trò cực kỳ quan trọng trong việc thiết kế, điều khiển và tối ưu hóa hiệu suất của robot công nghiệp. Nắm vững các nguyên lý động lực học robot là điều kiện tiên quyết để kiến tạo nên những hệ thống tự động hóa tiên tiến, cho phép robot công nghiệp hoạt động với độ chính xác, tốc độ và độ ổn định cao trong môi trường sản xuất công nghiệp khắc nghiệt, từ đó nâng cao năng suất và giảm thiểu chi phí vận hành.
Bài viết này sẽ đi sâu vào các khái niệm cơ bản, các phương pháp mô hình hóa phổ biến, những ứng dụng thiết thực trong lĩnh vực sản xuất công nghiệp, đồng thời đề cập đến các thách thức hiện tại và xu hướng phát triển tương lai của động lực học robot.
1. Giới Thiệu Chung về Động Lực Học Robot
Động lực học robot là ngành khoa học nghiên cứu cách thức các lực và mô-men tác động lên một robot, làm thay đổi trạng thái chuyển động của nó. Lĩnh vực này không chỉ tập trung vào việc mô tả chuyển động mà còn phân tích nguyên nhân gây ra chuyển động đó, từ đó cung cấp hiểu biết sâu sắc về hành vi vật lý của robot.
1.1. Định nghĩa Động lực học Robot
Động lực học robot là phân ngành cơ học nghiên cứu các lực tác dụng lên các khâu cấu tạo nên robot và mối quan hệ của chúng với các biến trạng thái chuyển động như vận tốc và gia tốc của robot. Nó cho phép các kỹ sư dự đoán chuyển động của robot dưới tác dụng của các lực bên ngoài và các mô-men điều khiển, đồng thời thiết lập các phương trình toán học mô tả toàn bộ hệ thống động lực.

1.2. Tầm quan trọng của Động lực học trong Robot học
Tầm quan trọng của động lực học trong robot học là không thể phủ nhận, bởi nó cho phép các nhà nghiên cứu và kỹ sư phát triển các chiến lược điều khiển robot hiệu quả và chính xác. Động lực học cung cấp một khuôn khổ để phân tích hiệu suất của robot, bao gồm khả năng tăng tốc, khả năng mang tải, và các giới hạn vận hành, từ đó tối ưu hóa các tham số thiết kế để đạt được hiệu suất làm việc cao nhất.
- Thiết kế và điều khiển robot chính xác, hiệu quả: Hiểu biết về động lực học giúp lựa chọn động cơ, hộp số và cấu trúc vật liệu phù hợp, đồng thời xây dựng các thuật toán điều khiển tiên tiến bù trừ các yếu tố như trọng lực, ma sát, và lực quán tính.
- Tối ưu hóa hiệu suất làm việc, nâng cao tốc độ và độ ổn định: Bằng cách phân tích động lực, ta có thể xác định được quỹ đạo chuyển động tối ưu và các phương pháp điều khiển nhằm giảm thiểu thời gian chu kỳ sản xuất, đồng thời duy trì sự ổn định của robot trong các điều kiện tải trọng khác nhau.
- Đảm bảo an toàn trong vận hành: Động lực học giúp đánh giá các lực tác dụng lên robot và môi trường xung quanh, đặc biệt quan trọng trong các ứng dụng robot cộng tác, nơi robot làm việc chung với con người.
1.3. Mối liên hệ với chủ đề Robot công nghiệp trong sản xuất công nghiệp
Động lực học là nền tảng cho việc tích hợp và vận hành hiệu quả robot công nghiệp trong các dây chuyền sản xuất hiện đại, bởi nó quyết định khả năng thực hiện các nhiệm vụ phức tạp của robot. Việc hiểu rõ động lực học giúp chúng ta dự đoán và kiểm soát hành vi của robot, đảm bảo robot có thể thực hiện các thao tác như hàn, lắp ráp, hoặc gắp đặt với độ chính xác và tốc độ yêu cầu trong môi trường sản xuất.
2. Các Khái Niệm Cơ Bản trong Động Lực Học Robot
Để xây dựng một mô hình động lực học hoàn chỉnh cho robot, ta cần nắm vững các khái niệm cơ bản về hệ tọa độ, khối lượng, quán tính, và các loại lực tác dụng. Các khái niệm này tạo nên nền tảng ngôn ngữ chung để mô tả và phân tích chuyển động của robot.
2.1. Hệ tọa độ và biến trạng thái
Hệ tọa độ và biến trạng thái đóng vai trò quan trọng trong việc định vị và mô tả chuyển động của robot trong không gian. Việc lựa chọn hệ tọa độ phù hợp giúp đơn giản hóa quá trình mô hình hóa động lực học và giảm thiểu sai số trong tính toán.
- Hệ tọa độ khớp (Joint space coordinates): Mô tả vị trí và hướng của robot thông qua các giá trị góc hoặc tịnh tiến của từng khớp. Ví dụ: đối với cánh tay robot 6 bậc tự do, trạng thái của robot được biểu diễn bằng 6 giá trị góc của các khớp quay.
- Hệ tọa độ Cartesian (Cartesian space coordinates): Mô tả vị trí và hướng của bộ phận cuối (end-effector) của robot trong không gian ba chiều (x, y, z và các góc xoay). Đây là hệ tọa độ mà con người thường hình dung khi tương tác với robot.
- Biến trạng thái: Bao gồm vị trí (góc/tọa độ), vận tốc (vận tốc góc/vận tốc dài) và gia tốc (gia tốc góc/gia tốc dài) của từng khớp hoặc của bộ phận cuối robot. Các biến này được sử dụng để xây dựng các phương trình động lực học.
2.2. Khối lượng và quán tính
Khối lượng và quán tính của các khâu robot là các thuộc tính vật lý cơ bản ảnh hưởng trực tiếp đến động lực học của hệ thống. Khối lượng ảnh hưởng đến lực trọng trường và lực quán tính tịnh tiến, trong khi mô-men quán tính ảnh hưởng đến lực quán tính quay.
- Khối lượng: Là đại lượng vật lý đặc trưng cho mức độ cản trở sự thay đổi trạng thái chuyển động tịnh tiến của một vật thể. Khối lượng của mỗi khâu robot xác định mức độ tác dụng của lực trọng trường lên khâu đó.
- Quán tính (Mô-men quán tính): Là đại lượng đặc trưng cho mức độ cản trở sự thay đổi trạng thái chuyển động quay của một vật thể quanh một trục. Mô-men quán tính của mỗi khâu robot quyết định mức độ khó khăn khi thay đổi vận tốc góc của khâu.
2.3. Lực và mô-men xoắn
Lực và mô-men xoắn là những tác động vật lý gây ra hoặc có xu hướng gây ra sự thay đổi trạng thái chuyển động của robot. Việc xác định chính xác các loại lực và mô-men này là bước quan trọng để xây dựng mô hình động lực học.
- Lực trọng trường: Lực hút của trái đất tác dụng lên khối tâm của mỗi khâu robot.
- Lực ma sát: Lực cản trở chuyển động tại các khớp robot và giữa robot với môi trường. Có hai loại chính là ma sát tĩnh và ma sát động.
- Lực điều khiển: Lực hoặc mô-men do các động cơ tại các khớp robot tạo ra để điều khiển chuyển động của robot.
- Lực phản lực: Các lực tương tác giữa các khâu robot với nhau và giữa robot với môi trường làm việc (ví dụ: lực tiếp xúc khi robot cầm nắm vật thể).

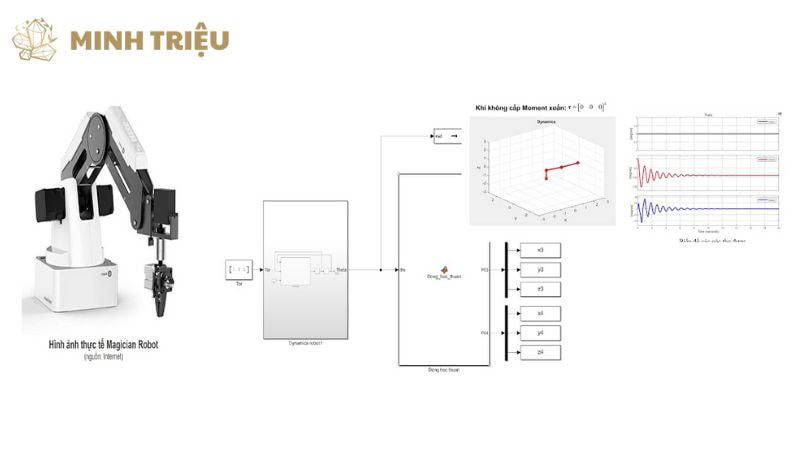
2.4. Mô hình hóa động lực học
Mô hình hóa động lực học là quá trình xây dựng các phương trình toán học mô tả mối quan hệ giữa các lực, mô-men và chuyển động của robot. Quá trình này thường dẫn đến một tập hợp các phương trình vi phân phi tuyến tính, phức tạp. Một dạng tổng quát của phương trình động lực học robot trong không gian khớp có thể được biểu diễn như sau: M(q)q¨+C(q,q˙)q˙+G(q)+F(q˙)=τ Trong đó:
- q là vector các biến khớp (vị trí góc/tịnh tiến).
- q˙ là vector vận tốc khớp.
- q¨ là vector gia tốc khớp.
- M(q) là ma trận quán tính khối lượng (Mass Inertia Matrix), phụ thuộc vào cấu hình robot.
- C(q,q˙)q˙ là vector các lực Coriolis và ly tâm, phụ thuộc vào vị trí và vận tốc khớp.
- G(q) là vector các lực trọng trường, phụ thuộc vào vị trí khớp.
- F(q˙) là vector các lực ma sát, phụ thuộc vào vận tốc khớp.
- τ là vector các mô-men điều khiển/lực tác động lên các khớp.
3. Các Phương Pháp Mô Hình Hóa Động Lực Học Robot
Có hai phương pháp chính được sử dụng để xây dựng mô hình động lực học robot: phương pháp Newton-Euler và phương pháp Lagrange. Mỗi phương pháp có những ưu điểm và nhược điểm riêng, phù hợp với các mục đích phân tích khác nhau.
3.1. Phương pháp Newton-Euler
Phương pháp Newton-Euler là một cách tiếp cận dựa trên việc áp dụng trực tiếp các định luật Newton về chuyển động và định luật Euler về chuyển động quay cho từng khâu riêng lẻ của robot. Phương pháp này thường được sử dụng trong việc tính toán động lực học thuận (từ lực/mô-men đến gia tốc).
Nguyên lý: Phương pháp này tính toán các lực và mô-men tác dụng lên mỗi khâu, sau đó sử dụng các công thức động lực học tuyến tính và động lực học quay để xác định gia tốc của khâu đó. Quá trình tính toán thường được thực hiện từ gốc đến ngọn (forward recursion) để tính vận tốc và gia tốc, và từ ngọn về gốc (backward recursion) để tính các lực và mô-men khớp.
Ưu điểm:
- Trực quan, dễ hiểu: Phương pháp này tương ứng trực tiếp với các khái niệm vật lý cơ bản, giúp người học dễ hình dung.
- Phù hợp cho phân tích động lực học thuận: Khi biết các lực và mô-men tại khớp, phương pháp Newton-Euler cho phép tính toán gia tốc của robot một cách hiệu quả.
Nhược điểm:
- Phức tạp với robot nhiều bậc tự do: Khi số lượng khớp tăng lên, số lượng phương trình và biến số cần xử lý cũng tăng lên đáng kể, làm cho việc tính toán trở nên cồng kềnh.
- Khó khăn trong việc xác định các ma trận động lực học: Phương pháp này không trực tiếp cho ra các ma trận như M(q), C(q,q˙), G(q) một cách rõ ràng như phương pháp Lagrange.
3.2. Phương pháp Lagrange
Phương pháp Lagrange là một phương pháp dựa trên nguyên lý năng lượng, sử dụng các khái niệm về năng lượng động và năng lượng thế của hệ thống để suy ra các phương trình động lực học. Phương pháp này thường được ưa chuộng trong việc tính toán động lực học nghịch (từ chuyển động đến lực/mô-men điều khiển).
Nguyên lý: Phương pháp này dựa trên phương trình Euler-Lagrange, được xây dựng từ hàm Lagrangian (L=K−P), trong đó K là tổng năng lượng động của hệ thống và P là tổng năng lượng thế của hệ thống. dtd(∂q˙i∂L)−∂qi∂L=τi
Ưu điểm:
- Tổng quát, dễ dàng xử lý các hệ thống phức tạp: Phương pháp này có thể áp dụng cho nhiều loại hệ thống cơ học, bao gồm cả các hệ thống có ràng buộc.
- Phù hợp cho phân tích động lực học nghịch: Khi biết quỹ đạo mong muốn của robot, phương pháp Lagrange cho phép tính toán các lực/mô-men khớp cần thiết để thực hiện quỹ đạo đó.
- Dễ dàng thu được các ma trận động lực học: Các thành phần của phương trình động lực học (M(q), C(q,q˙), G(q)) có thể được suy ra một cách trực tiếp từ các đạo hàm của hàm Lagrangian.
Nhược điểm:
- Đòi hỏi kiến thức về tính toán biến phân và cơ học lý thuyết: Người sử dụng cần có nền tảng vững chắc về toán học cao cấp.
- Ít trực quan hơn so với Newton-Euler: Phương pháp này mang tính chất trừu tượng hơn, không trực tiếp liên quan đến lực và mô-men trên từng khâu.
3.3. So sánh hai phương pháp
Việc lựa chọn giữa phương pháp Newton-Euler và phương pháp Lagrange phụ thuộc vào mục đích sử dụng và đặc điểm của robot. Cả hai phương pháp đều dẫn đến cùng một tập hợp các phương trình động lực học, nhưng cách tiếp cận và quá trình tính toán khác nhau. Dưới đây là bảng so sánh tóm tắt hai phương pháp:
| Tiêu chí so sánh | Phương pháp Newton-Euler | Phương pháp Lagrange |
| Nguyên lý cơ bản | Định luật Newton thứ hai và định luật Euler | Năng lượng động, năng lượng thế và nguyên lý Hamilton |
| Cách tiếp cận | Dựa trên lực và mô-men từng khâu | Dựa trên năng lượng toàn hệ thống |
| Độ phức tạp tính toán | Thường hiệu quả hơn cho động lực học thuận | Thường hiệu quả hơn cho động lực học nghịch |
| Ưu điểm nổi bật | Trực quan, dễ hiểu; phù hợp cho phân tích lực nội tại | Tổng quát, dễ mở rộng cho hệ thống phức tạp; cho ra ma trận động lực học |
| Nhược điểm nổi bật | Phức tạp cho robot nhiều bậc tự do; khó xác định ma trận | Ít trực quan; đòi hỏi kiến thức toán cao cấp |
| Ứng dụng điển hình | Mô phỏng động lực học thuận; phân tích động lực học | Thiết kế bộ điều khiển; phân tích động lực học nghịch |
4. Ứng Dụng của Động Lực Học Robot trong Thực Tiễn Sản Xuất Công Nghiệp
Động lực học robot có rất nhiều ứng dụng quan trọng trong thực tiễn sản xuất công nghiệp, từ giai đoạn thiết kế đến vận hành và bảo trì robot. Việc áp dụng các nguyên lý này giúp cải thiện đáng kể hiệu suất, độ chính xác và tuổi thọ của các hệ thống robot.
4.1. Thiết kế và tối ưu hóa robot
Động lực học là yếu tố then chốt trong việc thiết kế và tối ưu hóa robot, đảm bảo robot có thể hoạt động hiệu quả và bền bỉ trong môi trường sản xuất. Các nhà thiết kế sử dụng mô hình động lực học để đưa ra quyết định về cấu trúc, vật liệu và động cơ của robot.
- Lựa chọn vật liệu, cấu trúc để đạt hiệu suất mong muốn: Phân tích động lực giúp xác định các điểm yếu trong thiết kế, từ đó lựa chọn vật liệu có độ bền và độ cứng phù hợp, hoặc thay đổi cấu trúc để giảm thiểu rung động và tăng khả năng chịu tải.
- Giảm thiểu rung động, tăng độ chính xác: Bằng cách hiểu các tần số cộng hưởng và các chế độ rung động của robot thông qua phân tích động lực học, các kỹ sư có thể thiết kế các cơ cấu giảm chấn hoặc điều chỉnh các tham số điều khiển để loại bỏ hoặc giảm thiểu rung động không mong muốn, từ đó nâng cao độ chính xác của thao tác.
- Xác định khả năng mang tải và tốc độ tối đa: Mô hình động lực học cho phép tính toán lực và mô-men cần thiết để di chuyển một tải trọng nhất định với một gia tốc cụ thể, giúp xác định giới hạn hoạt động an toàn của robot.
4.2. Điều khiển robot
Điều khiển robot là một trong những ứng dụng quan trọng nhất của động lực học robot, cho phép robot thực hiện các nhiệm vụ phức tạp với độ chính xác và hiệu quả cao. Các bộ điều khiển hiện đại thường sử dụng mô hình động lực học để bù trừ các yếu tố không mong muốn.
Điều khiển theo mô hình (Model-based control): Sử dụng các phương trình động lực học của robot để tính toán chính xác mô-men điều khiển cần thiết cho mỗi khớp nhằm đạt được quỹ đạo mong muốn. Phương pháp này bù trừ được ảnh hưởng của trọng lực, lực Coriolis và ly tâm, giúp cải thiện đáng kể hiệu suất theo dõi quỹ đạo.
- Điều khiển lực/mô-men: Cho phép robot tương tác an toàn với môi trường hoặc các đối tượng với một lực nhất định. Ví dụ: trong các ứng dụng lắp ráp, robot cần tác dụng một lực chính xác để lắp ráp các chi tiết mà không làm hỏng chúng.
- Điều khiển quỹ đạo động: Thiết lập và thực hiện các quỹ đạo chuyển động mượt mà, chính xác cho robot, đặc biệt quan trọng trong các tác vụ yêu cầu tốc độ và độ chính xác cao như hàn, cắt laser.
Ví dụ về các thuật toán điều khiển ứng dụng động lực học:
- Điều khiển bù trọng trường (Gravity compensation): Tính toán và bù trừ lực trọng trường tác dụng lên robot để giảm tải cho động cơ và tăng độ chính xác vị trí.
- Điều khiển thích nghi: Bộ điều khiển điều chỉnh các tham số của nó dựa trên các thay đổi về tải trọng hoặc đặc tính động lực học của robot.

4.3. Giảm thiểu năng lượng tiêu thụ
Động lực học giúp giảm thiểu năng lượng tiêu thụ của robot bằng cách tối ưu hóa các chuyển động và quỹ đạo. Khi robot di chuyển một cách hiệu quả hơn, nó sẽ sử dụng ít năng lượng hơn để hoàn thành cùng một nhiệm vụ.
- Tối ưu hóa quỹ đạo chuyển động: Bằng cách sử dụng mô hình động lực học, các kỹ sư có thể tìm ra quỹ đạo di chuyển tối ưu mà tại đó robot tiêu thụ ít năng lượng nhất để hoàn thành một tác vụ. Điều này thường liên quan đến việc tránh các chuyển động đột ngột hoặc các chuyển động có gia tốc lớn.
- Thiết kế hệ thống thu hồi năng lượng: Hiểu biết về động lực học cũng hỗ trợ thiết kế các hệ thống thu hồi năng lượng từ các chuyển động hãm của robot, tái sử dụng năng lượng đó để cung cấp cho hệ thống.
4.4. Phân tích sự cố và bảo trì dự đoán
Động lực học hỗ trợ phân tích sự cố và bảo trì dự đoán bằng cách cung cấp thông tin chi tiết về các lực và mô-men tác dụng lên các bộ phận của robot. Việc giám sát các thông số động lực học có thể giúp phát hiện sớm các dấu hiệu hao mòn hoặc hỏng hóc.
- Giám sát và chẩn đoán: Các cảm biến lực và mô-men có thể được sử dụng để đo lường các giá trị động lực học thực tế, so sánh chúng với các giá trị dự đoán từ mô hình để phát hiện sự sai lệch.
- Phát hiện bất thường: Sự thay đổi trong các thông số động lực học như tăng ma sát khớp hoặc giảm hiệu suất của động cơ có thể chỉ ra các vấn đề tiềm ẩn, cho phép thực hiện bảo trì dự đoán trước khi xảy ra hỏng hóc nghiêm trọng.
5. Kết Luận
Nguyên lý động lực học robot là yếu tố then chốt và không thể thiếu trong lĩnh vực robot công nghiệp, đóng vai trò định hình khả năng vận hành của các hệ thống tự động hóa tiên tiến. Từ việc thiết kế robot tối ưu, điều khiển chính xác quỹ đạo, đến việc giảm thiểu năng lượng tiêu thụ và phân tích sự cố, động lực học cung cấp những công cụ và hiểu biết sâu sắc để các robot công nghiệp hoạt động hiệu quả, chính xác và an toàn trong mọi môi trường sản xuất.
Tầm nhìn tương lai cho thấy động lực học robot sẽ tiếp tục là lĩnh vực nghiên cứu quan trọng, đặc biệt với sự hội tụ của trí tuệ nhân tạo, học máy và sự phát triển của các thế hệ robot mới như robot cộng tác và robot mềm. Những tiến bộ trong mô hình hóa động lực học và thuật toán điều khiển sẽ không ngừng nâng cao năng lực của robot, mở ra những ứng dụng chưa từng có trong kỷ nguyên công nghiệp 4.0, biến các dây chuyền sản xuất thành những hệ thống thông minh và linh hoạt hơn.