
Robot công nghiệp
Ngôn ngữ lập trình robot công nghiệp- Chìa khóa Vận hành Trí tuệ Robot Công nghiệp

Trong kỷ nguyên Cách mạng Công nghiệp 4.0, robot công nghiệp đã trở thành một phần không thể thiếu trong các nhà máy hiện đại, đảm nhiệm vô số tác vụ từ hàn, lắp ráp đến kiểm tra chất lượng.
Tuy nhiên, khả năng thực hiện các công việc phức tạp của robot không đến từ bản thân phần cứng, mà nằm ở “bộ não” điều khiển chúng – đó chính là các ngôn ngữ lập trình robot.
Bài viết này sẽ đi sâu phân tích tầm quan trọng của các ngôn ngữ này, giới thiệu các ngôn ngữ lập trình robot cong nghiep, cùng với các ngôn ngữ khác, khám phá các tính năng và khái niệm lập trình cốt lõi, phác thảo quy trình lập trình cơ bản, và cuối cùng là nhìn nhận những ví dụ ứng dụng thực tế cùng xu hướng phát triển tương lai. Mục tiêu là cung cấp một cái nhìn toàn diện về cách thức các ngôn ngữ này mở khóa tiềm năng của robot, cho phép chúng hoạt động hiệu quả và linh hoạt trong môi trường sản xuất công nghiệp.
1. Tại sao cần ngôn ngữ lập trình cho robot công nghiệp?
Sự phát triển vượt bậc của robot công nghiệp trong sản xuất hiện đại đã tạo ra nhu cầu cấp thiết về các công cụ điều khiển mạnh mẽ, đó chính là các ngôn ngữ lập trình. Robot không thể tự mình thực hiện các tác vụ phức tạp mà không có một “ngôn ngữ” để nhận lệnh và hiểu được các bước cần làm.
Ngôn ngữ lập trình robot công nghiệp là tập hợp các câu lệnh, cú pháp và quy tắc cho phép con người chỉ dẫn robot cách di chuyển, tương tác với môi trường, và thực hiện các chức năng cụ thể. Các chương trình robot không chỉ bao gồm các lệnh chuyển động cơ bản mà còn tích hợp logic điều khiển, khả năng tương tác với cảm biến, và giao tiếp với các thiết bị ngoại vi khác trong hệ thống sản xuất.

Việc nắm vững các ngôn ngữ này là yếu tố then chốt để khai thác tối đa tiềm năng của robot, biến chúng thành những công cụ thông minh và linh hoạt trong mọi dây chuyền sản xuất, từ tự động hóa đến vận hành các quy trình tinh vi.
2. Các ngôn ngữ lập trình robot phổ biến (và so sánh)
Thị trường robot công nghiệp hiện do một số nhà sản xuất lớn thống trị, mỗi hãng thường phát triển ngôn ngữ lập trình riêng, tối ưu hóa cho phần cứng của mình.
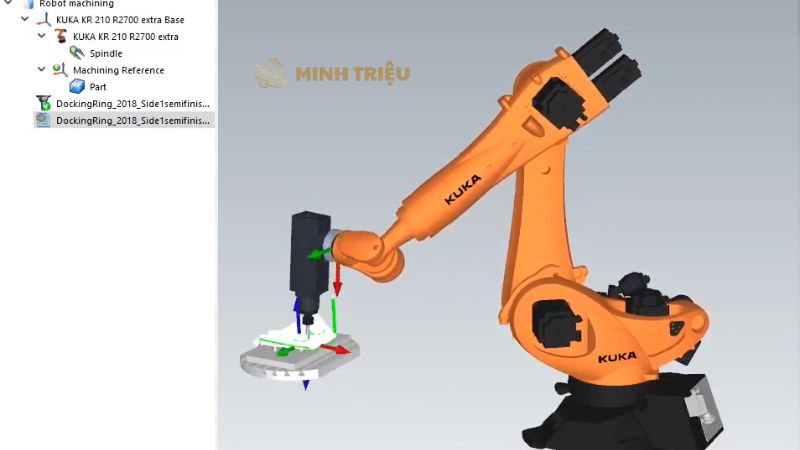
KUKA Robot Language (KRL) là ngôn ngữ lập trình độc quyền của các robot KUKA, nổi bật với cú pháp mạnh mẽ và tính linh hoạt cao, cho phép điều khiển quỹ đạo chuyển động robot một cách rất chính xác. KRL có khả năng xử lý các tác vụ phức tạp, đặc biệt trong các ứng dụng đòi hỏi độ tinh vi cao như hàn hồ quang, gia công cơ khí chính xác, và các hệ thống lắp ráp phức tạp. Tuy nhiên, KRL cũng được coi là có độ phức tạp cao hơn so với một số ngôn ngữ khác, đòi hỏi người lập trình phải có kiến thức chuyên sâu. Một ví dụ đoạn code KRL cơ bản có thể là:
; Di chuyển robot đến vị trí P1 với tốc độ 100%
PTP P1 #VEL_PTP 100
; Bật đầu kẹp (Gripper)
OUT[1]=TRUE
; Di chuyển tuyến tính đến vị trí P2
LIN P2
- ABB Rapid là ngôn ngữ lập trình hướng đối tượng của ABB, được đánh giá cao về tính dễ học, dễ sử dụng, và sở hữu thư viện hàm phong phú, hỗ trợ đa dạng ứng dụng. ABB RAPID đặc biệt phổ biến trong các ngành như ô tô, điện tử, và thực phẩm do sự hiệu quả trong các tác vụ bốc xếp, hàn điểm, và sơn. Mặc dù dễ tiếp cận, RAPID có thể ít linh hoạt hơn KRL trong việc điều khiển các quỹ đạo tùy chỉnh quá phức tạp. Ví dụ đoạn code RAPID cơ bản:
! Di chuyển robot đến vị trí Target_1 với tốc độ cao MoveJ Target_1, v1000, z100, Tool0 \WObj:=wobj0; ! Mở gripper SetDO do_Gripper_Open; ! Di chuyển tuyến tính đến Target_2 MoveL Target_2, v500, z50, Tool0 \WObj:=wobj0; - FANUC Karel là ngôn ngữ lập trình cao cấp cho robot FANUC, nổi bật với khả năng xử lý logic mạnh mẽ và thích hợp cho các ứng dụng tùy chỉnh phức tạp. Karel cho phép người dùng kiểm soát sâu hơn các chức năng của robot và tích hợp với các hệ thống điều khiển ngoại vi. Nhược điểm của Karel là cần kiến thức chuyên sâu về cả ngôn ngữ và phần cứng robot FANUC, và nó thường được sử dụng cho các chức năng tùy biến mà các công cụ lập trình chuẩn không hỗ trợ. Ví dụ đoạn code Karel cơ bản:
PROGRAM pick_place_example VAR pos1, pos2 : POSITION BEGIN ; Gán giá trị cho vị trí pos1 = JPOS(0,0,0,0,0,0) pos2 = JPOS(100,0,0,0,0,0) ; Di chuyển đến vị trí 1 MOVE_TO pos1 ; Bật tín hiệu đầu ra SET_DI_NUM(1, ON) ; Di chuyển đến vị trí 2 MOVE_TO pos2 END pick_place_example - Motoman Inform là ngôn ngữ lập trình được Yaskawa phát triển cho dòng robot Motoman của họ, với ưu điểm là tối ưu hóa chặt chẽ cho phần cứng Motoman và dễ dàng tích hợp với các hệ thống điều khiển PLC của Yaskawa. Inform được sử dụng rộng rãi trong các ứng dụng hàn, xử lý vật liệu và lắp ráp. Mặc dù hiệu quả cho các robot Motoman, Inform có thể ít phổ biến hơn và có cộng đồng hỗ trợ nhỏ hơn so với KRL hay RAPID. Ví dụ đoạn code Inform cơ bản:
' Điểm đích P00000 = (0, 0, 0, 0, 0, 0) ' Di chuyển đến điểm P00000 MOVJ P00000 V=100 ' Bật đầu ra số DOUT OT#(1) ON ' Điểm đích khác P00001 = (100, 0, 0, 0, 0, 0) ' Di chuyển tuyến tính đến P00001 MOVL P00001 V=50
Khi so sánh tổng quan các ngôn ngữ này, việc lựa chọn phụ thuộc nhiều vào ứng dụng cụ thể và loại robot đang sử dụng.
3. Các tính năng và khái niệm quan trọng trong lập trình robot
Để lập trình robot hiệu quả, người lập trình cần nắm vững các tính năng và khái niệm cốt lõi liên quan đến cách robot di chuyển và tương tác với thế giới thực.
- Hệ tọa độ robot là nền tảng cơ bản cho mọi chuyển động và định vị của robot.
- Tọa độ khớp (joint coordinates) mô tả vị trí của robot thông qua giá trị góc hoặc vị trí của từng khớp riêng lẻ.
- Tọa độ Descartes (Cartesian coordinates) mô tả vị trí của điểm cuối (Tool Center Point – TCP) của robot trong không gian 3D (X, Y, Z) cùng với hướng của nó (Rotation X, Y, Z hoặc Euler angles). Người lập trình thường xuyên phải thực hiện chuyển đổi giữa các hệ tọa độ này để điều khiển robot chính xác.
- Các loại chuyển động robot định hình cách robot di chuyển trong không gian làm việc.
- Chuyển động điểm-điểm (point-to-point – PTP) là kiểu di chuyển nhanh nhất, trong đó robot di chuyển từ điểm hiện tại đến điểm đích mà không quan tâm đến quỹ đạo giữa hai điểm.
- Chuyển động đường thẳng (linear) đảm bảo TCP của robot di chuyển theo một đường thẳng tuyệt đối từ điểm xuất phát đến điểm đích, thường được sử dụng trong các ứng dụng hàn, cắt hoặc dán.
- Chuyển động tròn (circular) cho phép TCP di chuyển theo một cung tròn được xác định bởi ba điểm (điểm bắt đầu, điểm trung gian, điểm kết thúc) hoặc hai điểm và một tâm. Việc điều khiển tốc độ và gia tốc là cực kỳ quan trọng để đảm bảo chuyển động mượt mà và chính xác, tránh rung lắc hoặc va chạm.
- Cảm biến và tích hợp là yếu tố then chốt giúp robot phản ứng với môi trường và thực hiện các tác vụ phức tạp. Robot có thể sử dụng các loại cảm biến như cảm biến lực để phát hiện va chạm hoặc thực hiện các tác vụ lắp ráp tinh vi, cảm biến thị giác (camera) để nhận diện vật thể và định vị chính xác, hoặc cảm biến khoảng cách để tránh vật cản. Lập trình robot phản ứng với dữ liệu cảm biến cho phép robot thích nghi với những thay đổi trong môi trường làm việc.
- Giao tiếp với thiết bị ngoại vi là khả năng robot tương tác với các máy móc khác trong dây chuyền sản xuất. Robot thường giao tiếp với PLC (Programmable Logic Controller) để đồng bộ hóa hoạt động với các máy khác, với hệ thống thị giác máy tính để nhận diện và định vị đối tượng, hoặc với các thiết bị như băng tải, máy CNC để phối hợp quy trình làm việc.
- Lập trình an toàn là một khía cạnh tối quan trọng trong môi trường làm việc có robot. Các ngôn ngữ lập trình robot thường có các tính năng an toàn tích hợp như giới hạn vùng làm việc, tốc độ an toàn, và các lệnh dừng khẩn cấp. Việc tuân thủ các tiêu chuẩn an toàn quốc tế như ISO 10218 là bắt buộc để đảm bảo an toàn cho con người làm việc gần robot.
4. Quy trình lập trình robot cơ bản
Việc lập trình robot đòi hỏi một quy trình có hệ thống để đảm bảo robot hoạt động đúng và hiệu quả theo yêu cầu của tác vụ.
- Xác định yêu cầu: Bước đầu tiên là phân tích kỹ lưỡng tác vụ mà robot cần thực hiện, bao gồm các bước di chuyển, tương tác với vật liệu hoặc thiết bị, yêu cầu về thời gian chu kỳ, độ chính xác, và các điều kiện môi trường. Việc này thường liên quan đến làm việc với các kỹ sư quy trình và chuyên gia vận hành.
- Thiết kế chương trình: Dựa trên yêu cầu, người lập trình sẽ lập kế hoạch chi tiết các bước di chuyển của robot, thiết lập logic điều khiển (ví dụ: điều kiện if/else, vòng lặp), và xác định cách robot tương tác với các cảm biến hoặc thiết bị ngoại vi khác. Sơ đồ luồng (flowchart) hoặc pseudo-code thường được sử dụng trong giai đoạn này.
- Viết code: Sử dụng ngôn ngữ lập trình phù hợp với loại robot và ứng dụng, người lập trình sẽ viết các dòng lệnh cụ thể để robot thực hiện các chức năng đã thiết kế. Việc này đòi hỏi kiến thức vững chắc về cú pháp và các hàm của ngôn ngữ.
- Mô phỏng (tùy chọn nhưng khuyến khích): Trước khi chạy chương trình trên robot thật, việc sử dụng phần mềm mô phỏng là rất quan trọng. Mô phỏng giúp kiểm tra lỗi logic, va chạm tiềm ẩn, tối ưu hóa quỹ đạo và thời gian chu kỳ trong môi trường ảo, tiết kiệm thời gian và giảm rủi ro hư hỏng thiết bị.
- Chạy thử và hiệu chỉnh: Sau khi mô phỏng thành công, chương trình được tải lên robot thật. Người lập trình sẽ chạy thử chương trình ở tốc độ chậm, từng bước một (step-by-step), để kiểm tra hoạt động, điều chỉnh các điểm tọa độ, tốc độ, gia tốc và các thông số khác để đạt được kết quả mong muốn và đảm bảo an toàn.
- Tối ưu hóa: Khi chương trình đã hoạt động ổn định, bước tiếp theo là tối ưu hóa. Điều này bao gồm việc tinh chỉnh quỹ đạo để robot di chuyển mượt mà hơn, giảm thời gian chu kỳ mà vẫn duy trì độ chính xác, tối ưu hóa việc sử dụng năng lượng, và cải thiện hiệu suất tổng thể của hệ thống.
5. Xu hướng phát triển của ngôn ngữ lập trình robot
Lĩnh vực lập trình robot không ngừng phát triển, với những xu hướng mới nhằm đơn giản hóa việc lập trình, tăng cường trí tuệ và khả năng thích nghi của robot.
- Ngôn ngữ lập trình trực quan (Graphical Programming) đang trở nên phổ biến, thay thế việc viết code bằng cách cho phép người dùng kéo thả các khối lệnh hoặc biểu tượng để xây dựng chương trình. Điều này giúp giảm đáng kể thời gian học và sử dụng, cho phép cả những người không có nền tảng lập trình chuyên sâu cũng có thể lập trình robot. Các phần mềm như RobotStudio của ABB hay Teach Pendant của Universal Robots là những ví dụ điển hình.
- Tích hợp AI và học máy vào ngôn ngữ lập trình đang mở ra kỷ nguyên robot tự động học hỏi và cải thiện hiệu suất. Robot có thể được lập trình để thu thập dữ liệu từ môi trường, phân tích thông tin bằng AI và điều chỉnh các tham số hoạt động hoặc quỹ đạo di chuyển của mình để tối ưu hóa tác vụ mà không cần lập trình lại thủ công.
- Đối với robot cộng tác (Cobots), ngôn ngữ lập trình được thiết kế đơn giản hơn, dễ sử dụng, thường thông qua việc “dạy” robot bằng cách trực tiếp di chuyển tay robot (lead-through programming) hoặc giao diện kéo thả trực quan. Điều này giúp người không chuyên dễ dàng triển khai cobot vào các ứng dụng nhỏ trong môi trường sản xuất.
- ROS (Robot Operating System) không phải là một ngôn ngữ lập trình riêng lẻ mà là một framework mã nguồn mở phổ biến, cung cấp các công cụ, thư viện và quy ước để phát triển các ứng dụng robot phức tạp. ROS hỗ trợ nhiều ngôn ngữ lập trình (Python, C++), cho phép các nhà phát triển xây dựng các hệ thống robot phức tạp với khả năng giao tiếp giữa các module khác nhau, và đặc biệt hữu ích trong nghiên cứu và phát triển robot tiên tiến.
6. Kết luận
Tóm lại, các ngôn ngữ lập trình robot công nghiệp, từ những ngôn ngữ chuyên dụng như KUKA KRL và ABB RAPID đến các framework linh hoạt như ROS, đóng vai trò then chốt trong việc khai thác tối đa tiềm năng của robot công nghiệp trong mọi khía cạnh của sản xuất công nghiệp.
Chúng không chỉ là công cụ để điều khiển chuyển động của robot mà còn là nền tảng cho phép robot tương tác với cảm biến, giao tiếp với các hệ thống khác, và thực hiện các tác vụ phức tạp một cách chính xác và hiệu quả.
Việc làm chủ các ngôn ngữ này là một kỹ năng vô cùng giá trị, giúp các cá nhân và doanh nghiệp không chỉ duy trì lợi thế cạnh tranh mà còn tiên phong trong lĩnh vực tự động hóa đầy tiềm năng.
Tương lai của ngành sản xuất chắc chắn sẽ chứng kiến sự phát triển không ngừng của các công nghệ lập trình, biến robot ngày càng thông minh, linh hoạt và dễ sử dụng hơn nữa, mở ra những khả năng không giới hạn cho nhà máy thông minh của tương lai.