
Robot công nghiệp
Lập trình Cobot: Lập trình Bằng tay (Hand Guiding) trong sản xuất Công nghiệp

Robot cộng tác (cobot) đã trở thành trụ cột của ngành sản xuất hiện đại, mang đến sự linh hoạt và hiệu quả chưa từng có. Trong bối cảnh đó, lập trình bằng tay (hand guiding) nổi lên như một phương pháp đột phá, cho phép người vận hành hướng dẫn robot trực tiếp bằng cách di chuyển cánh tay của chúng, loại bỏ nhu cầu về kiến thức lập trình phức tạp.
Phương pháp này đơn giản hóa đáng kể quá trình thiết lập và triển khai cobot, đẩy nhanh tốc độ tự động hóa và tối ưu hóa quy trình sản xuất. Bài viết này sẽ đi sâu vào nguyên lý hoạt động, lợi ích vượt trội, các ứng dụng thực tế, cũng như những thách thức và triển vọng tương lai của lập trình bằng tay, giúp bạn nắm bắt toàn diện về công nghệ tiên tiến này.
1. Giới thiệu tổng quan về lập trình Cobot và khái niệm Hand Guiding
1.1 Cobot là gì và vì sao chúng cần thiết trong sản xuất?
Cobot là loại robot được thiết kế để làm việc an toàn và hiệu quả cùng con người trong môi trường sản xuất, khác biệt hoàn toàn với robot công nghiệp truyền thống vốn yêu cầu khu vực hoạt động riêng biệt. Chúng ta cần cobot trong sản xuất công nghiệp vì chúng tăng năng suất, giảm thiểu lỗi và mang lại sự linh hoạt cao cho các dây chuyền lắp ráp.
1.2 Lập trình Cobot: Bức tranh toàn cảnh
Các phương pháp lập trình cobot phổ biến bao gồm lập trình truyền thống (code-based), vốn yêu cầu kiến thức chuyên sâu về ngôn ngữ lập trình, và lập trình trực tiếp (direct programming), thiên về tính trực quan. Trong khi lập trình truyền thống (code-based) mang lại khả năng điều khiển chi tiết và phức tạp, nó lại đòi hỏi kỹ năng chuyên môn và tốn nhiều thời gian. Ngược lại, lập trình trực tiếp, bao gồm cả lập trình bằng tay (hand guiding), hướng tới sự đơn giản và dễ tiếp cận.
1.3 Hand Guiding là gì? Khái niệm cốt lõi
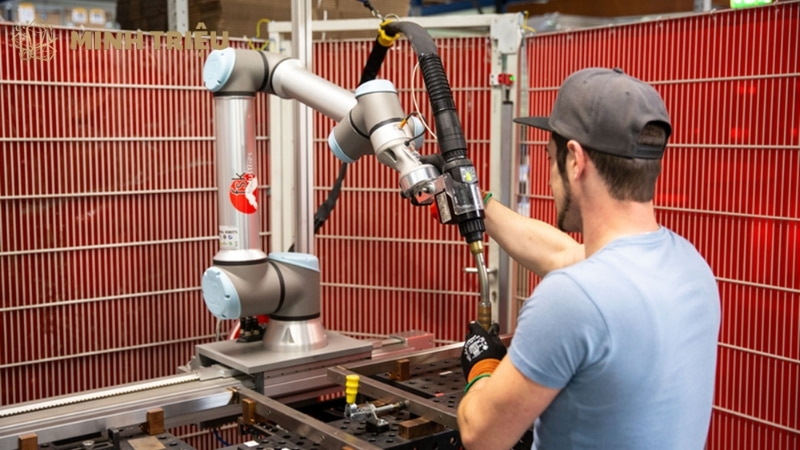
Hand Guiding là một phương pháp lập trình trực quan, trong đó người vận hành nắm trực tiếp cánh tay của cobot và di chuyển nó qua các điểm hoặc quỹ đạo mong muốn, đồng thời ghi lại các vị trí đó để tạo thành chương trình. Phương pháp này loại bỏ nhu cầu viết mã, giúp bất kỳ ai cũng có thể lập trình robot một cách nhanh chóng và chính xác.
2. Nguyên lý hoạt động và các công nghệ đằng sau Hand Guiding
2.1 Cơ chế hoạt động
Nguyên lý hoạt động của Hand Guiding dựa trên sự kết hợp của cảm biến lực/mô-men xoắn và thuật toán điều khiển tinh vi. Cảm biến lực/mô-men xoắn tích hợp ở các khớp hoặc đế của cobot sẽ ghi nhận lực tác động từ người dùng, sau đó, thuật toán điều khiển sẽ diễn giải các chuyển động này thành lệnh lập trình để cobot có thể tái tạo.
2.2 Các loại Hand Guiding phổ biến
Các loại hình lập trình bằng tay phổ biến bao gồm lập trình điểm (Point-to-Point), lập trình đường (Path Programming), và lập trình lực (Force Programming). Lập trình điểm (Point-to-Point) cho phép người dùng dẫn robot đến từng vị trí cụ thể và lưu lại điểm đó. Lập trình đường (Path Programming) cho phép dẫn robot theo một quỹ đạo liên tục cho các tác vụ như hàn hoặc sơn.
Cuối cùng, lập trình lực (Force Programming) cho phép cobot thực hiện tác vụ dựa trên phản hồi lực, lý tưởng cho việc lắp ráp chi tiết cần độ chính xác cao.
2.3 Thiết bị hỗ trợ
Một số cobot tích hợp nút bấm kích hoạt hoặc giao diện cảm ứng trực tiếp trên tay robot để hỗ trợ quá trình lập trình. Ngoài ra, giao diện người-máy (HMI) đi kèm đóng vai trò quan trọng trong việc hiển thị thông tin và cho phép người dùng tinh chỉnh các điểm và quỹ đạo đã ghi.

3. Lợi ích vượt trội của Hand Guiding trong sản xuất
3.1 Tối ưu hóa thời gian triển khai
Hand Guiding giảm đáng kể thời gian cài đặt và lập trình cobot so với các phương pháp truyền thống, cho phép cobot nhanh chóng được đưa vào sản xuất và tăng lợi tức đầu tư (ROI). Việc này thúc đẩy quá trình tự động hóa trong doanh nghiệp một cách nhanh chóng.
3.2 Giảm thiểu yêu cầu kỹ năng lập trình
Người vận hành không cần là chuyên gia lập trình hoặc có kiến thức chuyên sâu về code, nhờ đó khả năng phổ cập công nghệ cobot được mở rộng đến nhiều đối tượng lao động hơn. Điều này giúp các doanh nghiệp dễ dàng hơn trong việc tìm kiếm và đào tạo nhân lực.
3.3 Tăng tính linh hoạt và khả năng thích ứng
Với Hand Guiding, doanh nghiệp có thể dễ dàng điều chỉnh chương trình khi quy trình sản xuất thay đổi, làm cho phương pháp này thích hợp cho các lô sản xuất nhỏ và sản phẩm đa dạng.

3.4 Cải thiện năng suất và chất lượng
Lập trình bằng tay giúp tối ưu hóa quỹ đạo chuyển động, giảm thiểu lãng phí và đạt được độ chính xác cao khi được lập trình đúng cách. Điều này đóng góp trực tiếp vào việc nâng cao chất lượng sản phẩm.
3.5 An toàn và thân thiện với người dùng
Thiết kế của cobot đảm bảo an toàn tối đa, giảm rủi ro va chạm và tạo ra một môi trường làm việc cộng tác hiệu quả giữa người và máy. Đây là một trong những lợi thế lớn nhất của cobot so với robot công nghiệp truyền thống.
4. Các ứng dụng thực tế của lập trình Hand Guiding
Lập trình bằng tay được ứng dụng rộng rãi trong nhiều lĩnh vực sản xuất, bao gồm các tác vụ đòi hỏi sự khéo léo và linh hoạt cao. Dưới đây là bảng tổng hợp một số ứng dụng tiêu biểu:
| Ứng dụng | Mô tả | Lợi ích |
| Sơn và đánh bóng | Hướng dẫn cobot di chuyển theo bề mặt phức tạp của sản phẩm để sơn hoặc đánh bóng đều. | Đảm bảo lớp sơn/đánh bóng đồng đều, giảm tiếp xúc hóa chất cho người lao động. |
| Hàn (MIG/TIG) | Lập trình đường hàn chính xác bằng cách dẫn tay cobot theo quỹ đạo đường hàn mong muốn. | Tăng độ chính xác mối hàn, giảm sai sót, cải thiện chất lượng sản phẩm. |
| Lắp ráp sản phẩm | Hướng dẫn cobot nhặt và đặt linh kiện vào đúng vị trí, đặc biệt cho các chi tiết nhỏ. | Tăng tốc độ lắp ráp, giảm lỗi do con người, đặc biệt trong các tác vụ lặp lại. |
| Gia công và mài | Dẫn cobot theo đường viền sản phẩm để thực hiện các thao tác gia công, mài. | Đảm bảo độ đồng nhất sản phẩm, giảm sức lao động, tăng an toàn. |
| Kiểm tra chất lượng | Di chuyển camera hoặc cảm biến để quét sản phẩm, kiểm tra các khuyết tật. | Đảm bảo chất lượng đầu ra, phát hiện lỗi sớm, tiết kiệm thời gian. |
| Vận chuyển và đóng gói | Lập trình các điểm pick-and-place cho các vật phẩm, giúp đóng gói nhanh chóng. | Tối ưu hóa quy trình đóng gói, giảm sức người, tăng năng suất. |
5. Thách thức và cân nhắc khi triển khai Hand Guiding
5.1 Giới hạn về độ phức tạp của tác vụ
Lập trình bằng tay có giới hạn đối với các tác vụ quá phức tạp, đôi khi không thể hoàn toàn thay thế lập trình truyền thống cho các logic điều khiển phức tạp hoặc khi cần tích hợp sâu với hệ thống sản xuất lớn. Việc kết hợp giữa hai phương pháp lập trình sẽ mang lại hiệu quả tối ưu.

5.2 Yêu cầu về độ chính xác lặp lại
Độ chính xác của quá trình Hand Guiding phụ thuộc vào kỹ năng của người vận hành và công nghệ cảm biến của cobot. Do đó, cần kiểm tra kỹ lưỡng các điểm và quỹ đạo đã lập trình để đảm bảo độ chính xác lặp lại trong sản xuất hàng loạt.
5.3 Chi phí ban đầu
Mặc dù giảm chi phí vận hành về lâu dài, chi phí đầu tư ban đầu cho một cobot có tích hợp tính năng Hand Guiding vẫn có thể là một khoản đáng kể, đòi hỏi doanh nghiệp phải cân nhắc kỹ lưỡng về lợi tức đầu tư (ROI).
5.4 Đào tạo người vận hành
Dù dễ hơn, người dùng vẫn cần được đào tạo cơ bản về an toàn và thao tác đúng cách với cobot để đảm bảo hiệu suất và tránh rủi ro.
5.5 Tích hợp với hệ thống khác
Việc kết nối cobot với các máy móc, hệ thống ERP hay MES khác trong nhà máy đôi khi đặt ra thách thức về mặt kỹ thuật, yêu cầu sự tương thích và khả năng giao tiếp dữ liệu.
6. Kết luận
Lập trình bằng tay (Hand Guiding) đã định hình lại cách chúng ta tương tác với robot cộng tác, biến việc lập trình trở nên trực quan, nhanh chóng và hiệu quả. Phương pháp này không chỉ giảm thiểu rào cản kỹ thuật mà còn thúc đẩy sự linh hoạt và năng suất trong các môi trường sản xuất hiện đại. Bằng cách tận dụng triệt để những ưu điểm của Hand Guiding và kết hợp với các công nghệ tiên tiến khác, doanh nghiệp có thể nâng cao đáng kể năng lực cạnh tranh, mở ra kỷ nguyên mới cho sự hợp tác hài hòa giữa con người và máy móc.