
Robot công nghiệp
Hệ Thống Thị Giác Máy 3D – Trong Robot Công Nghiệp của Minh Triệu
Trong bối cảnh cách mạng công nghiệp 4.0, nơi mà tự động hóa và độ chính xác là những yếu tố then chốt, hệ thống thị giác máy 3D đã nổi lên như một công nghệ đột phá, bổ sung và nâng tầm khả năng của robot công nghiệp trong các ứng dụng phức tạp.
Bài viết này sẽ cung cấp một cái nhìn toàn diện về cấu tạo, nguyên lý hoạt động, các công nghệ phổ biến, ứng dụng đa dạng, lợi ích vượt trội, cũng như những thách thức và xu hướng phát triển của hệ thống thị giác máy 3D trong lĩnh vực robot công nghiệp, nhằm giúp độc giả hiểu rõ hơn về vai trò chiến lược của nó trong việc thúc đẩy hiệu quả và linh hoạt trong sản xuất công nghiệp hiện đại.
1. Hệ Thống Thị Giác Máy 3D và Robot Công Nghiệp
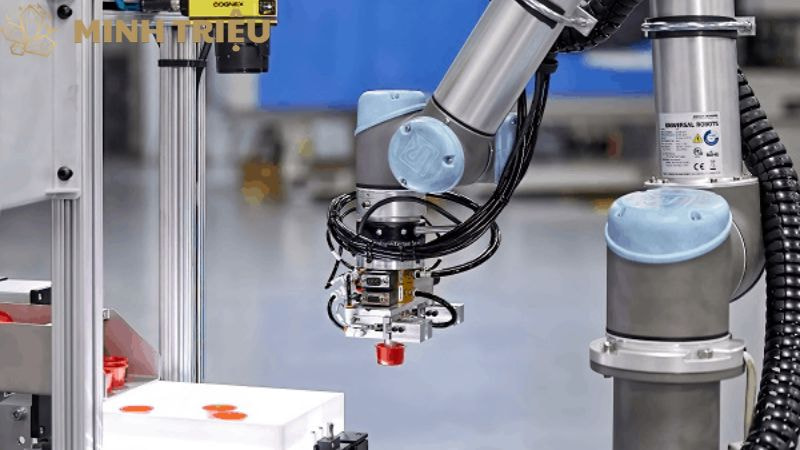
Hệ thống thị giác máy 3D (3D Machine Vision System) đóng vai trò then chốt trong việc thu nhận và xử lý thông tin ba chiều của vật thể, cho phép tạo ra một mô hình số hóa chính xác về hình dạng, kích thước và vị trí trong không gian thực. Công nghệ này vượt xa khả năng của thị giác máy 2D truyền thống, vốn chỉ cung cấp thông tin phẳng, bằng cách cung cấp dữ liệu về chiều sâu, giúp máy móc “nhìn” và “hiểu” thế giới vật lý một cách toàn diện hơn.
Trong khi đó, robot công nghiệp là những cánh tay máy tự động được lập trình để thực hiện các nhiệm vụ lặp đi lặp lại hoặc nguy hiểm trong môi trường sản xuất. Mặc dù robot truyền thống đã mang lại hiệu quả đáng kể, khả năng thích ứng của chúng với các tình huống không xác định, đặc biệt là khi xử lý các vật thể nằm lộn xộn hoặc có hình dạng phức tạp, vẫn còn hạn chế.

Do đó, việc tích hợp hệ thống thị giác máy 3D vào robot công nghiệp đã tạo ra một bước tiến cách mạng, trao cho robot khả năng định vị, nhận diện và tương tác với các vật thể trong không gian ba chiều một cách thông minh và linh hoạt hơn. Sự kết hợp này mang lại những lợi ích vượt trội như khả năng xử lý vật thể phức tạp, độ chính xác cao trong các tác vụ tinh vi, khả năng tự động hóa các quy trình đòi hỏi sự khéo léo của con người, từ đó nâng cao năng suất và giảm chi phí trong sản xuất công nghiệp.
2. Các Công Nghệ Thị Giác Máy 3D Phổ Biến
Để thu thập thông tin về chiều sâu và hình dạng không gian của vật thể, hệ thống thị giác máy 3D sử dụng nhiều công nghệ tiên tiến khác nhau, mỗi loại có những nguyên lý, ưu và nhược điểm riêng phù hợp với các ứng dụng cụ thể.
Stereo Vision (Thị giác lập thể):
- Nguyên lý: Công nghệ này mô phỏng cách mắt người hoạt động, sử dụng hai hoặc nhiều camera được đặt ở các vị trí khác nhau để cùng chụp một cảnh vật. Bằng cách phân tích sự khác biệt về vị trí (sự dịch chuyển thị sai – disparity) của cùng một điểm trên vật thể trong các hình ảnh 2D thu được từ các camera, hệ thống có thể tính toán được tọa độ 3D của điểm đó.
- Ưu điểm: Khả năng hoạt động tốt trong nhiều điều kiện ánh sáng, chi phí tương đối thấp so với một số công nghệ khác, phù hợp cho các vật thể có kết cấu bề mặt phong phú.
- Nhược điểm: Hiệu suất có thể bị ảnh hưởng bởi bề mặt vật thể đồng nhất (ít kết cấu), yêu cầu hiệu chuẩn chính xác và phức tạp, dễ bị nhiễu bởi ánh sáng môi trường.
Structured Light (Ánh sáng cấu trúc):
- Nguyên lý: Hệ thống chiếu một mẫu ánh sáng đã biết (ví dụ: các đường thẳng, lưới, hoặc các điểm ngẫu nhiên) lên bề mặt vật thể. Camera sau đó chụp lại hình ảnh của mẫu ánh sáng bị biến dạng do hình dạng 3D của vật thể. Bằng cách phân tích sự biến dạng này và sử dụng các thuật toán hình học, hệ thống có thể tái tạo lại hình dạng 3D của vật thể.
- Ưu điểm: Độ chính xác cao, đặc biệt phù hợp cho các vật thể có bề mặt đồng nhất hoặc ít kết cấu, tốc độ thu thập dữ liệu nhanh.
- Nhược điểm: Nhạy cảm với ánh sáng môi trường (yêu cầu môi trường kiểm soát ánh sáng tốt), không phù hợp với các vật thể di chuyển nhanh, và có thể gặp khó khăn với bề mặt phản chiếu hoặc trong suốt.
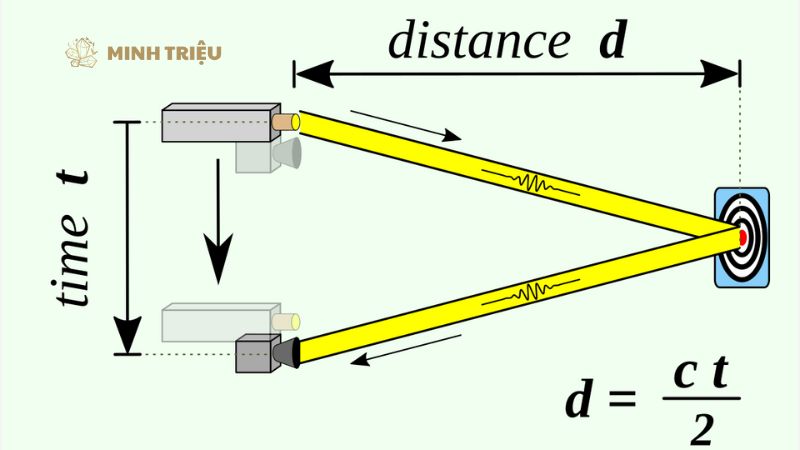
Time-of-Flight (TOF):
- Nguyên lý: Cảm biến TOF phát ra một xung ánh sáng (thường là hồng ngoại) và đo thời gian mà xung ánh sáng đó di chuyển từ cảm biến đến vật thể rồi quay trở lại. Dựa vào vận tốc ánh sáng, hệ thống tính toán được khoảng cách đến từng điểm trên bề mặt vật thể, từ đó tạo ra bản đồ độ sâu (depth map) của toàn bộ cảnh.
- Ưu điểm: Tốc độ thu thập dữ liệu nhanh, phù hợp cho việc quan sát các vật thể lớn hoặc cảnh rộng, ít bị ảnh hưởng bởi kết cấu bề mặt, chi phí ngày càng giảm.
- Nhược điểm: Độ chính xác thường thấp hơn Structured Light ở khoảng cách gần, có thể bị ảnh hưởng bởi ánh sáng mặt trời mạnh và hiện tượng tán xạ ánh sáng.
Laser Triangulation (Tam giác hóa laser):
- Nguyên lý: Một tia laser (thường là laser đường thẳng hoặc điểm) được chiếu lên bề mặt vật thể. Một camera được đặt ở một góc cố định so với tia laser sẽ chụp lại hình ảnh của đường laser bị biến dạng khi nó quét qua bề mặt 3D của vật thể. Dựa trên nguyên tắc tam giác học, vị trí của đường laser trong ảnh được sử dụng để tính toán tọa độ 3D của điểm đó trên vật thể. Để có được mô hình 3D hoàn chỉnh, vật thể hoặc cảm biến cần di chuyển tương đối.
- Ưu điểm: Độ chính xác rất cao, phù hợp cho việc đo lường và kiểm tra chi tiết nhỏ, khả năng hoạt động tốt với nhiều loại bề mặt.
- Nhược điểm: Tốc độ thu thập dữ liệu chậm hơn so với TOF hoặc Structured Light khi quét toàn bộ vật thể, yêu cầu vật thể hoặc cảm biến phải di chuyển, có thể bị ảnh hưởng bởi ánh sáng môi trường và màu sắc vật thể.
3. Ứng Dụng Của Hệ Thống Thị Giác Máy 3D Trong Robot Công Nghiệp
Hệ thống thị giác máy 3D mở rộng đáng kể khả năng của robot công nghiệp, cho phép chúng thực hiện các tác vụ phức tạp và tinh vi mà thị giác 2D không thể đáp ứng.
Phân loại và Định vị Vật Thể Phức Tạp (Pick & Place):
- Robot gắp đặt vật thể ngẫu nhiên (Random Bin Picking) là một trong những ứng dụng đột phá nhất của thị giác 3D. Robot có khả năng xác định chính xác vị trí và hướng của các vật thể có hình dạng phức tạp, nằm lộn xộn, chồng chéo lên nhau trong thùng chứa mà không cần sắp xếp trước. Điều này loại bỏ nhu cầu về các cơ cấu cấp phôi tốn kém và cứng nhắc, tăng tính linh hoạt đáng kể cho dây chuyền sản xuất.
- Trong các quy trình lắp ráp chi tiết có hình dạng phức tạp, thị giác 3D hướng dẫn robot định vị và lắp ghép các bộ phận một cách chính xác tuyệt đối trong không gian 3 chiều, ngay cả khi chúng có các bề mặt cong hoặc khớp nối phức tạp, giảm thiểu sai sót và tăng tốc độ lắp ráp.
Kiểm Tra Chất Lượng và Đo Lường 3D:
- Kiểm tra bề mặt 3D là một ứng dụng quan trọng, nơi hệ thống thị giác 3D có thể phát hiện các khuyết tật nhỏ nhất như vết lõm, vết phồng, cong vênh, biến dạng, hoặc các lỗi bề mặt khác trên các chi tiết có hình dạng phức tạp, bề mặt cong hoặc tự do. Điều này đảm bảo chất lượng sản phẩm đồng đều và cao cấp, đặc biệt trong các ngành như ô tô, hàng không vũ trụ.
- Hệ thống còn thực hiện đo lường 3D chính xác các thông số như kích thước, hình dạng, độ cong, độ phẳng, hoặc độ song song của các chi tiết 3D. Dữ liệu này được sử dụng để kiểm soát chất lượng, xác minh dung sai sản xuất và đảm bảo sản phẩm đạt tiêu chuẩn thiết kế.
Hướng Dẫn Robot Thực Hiện Các Tác Vụ Đòi Hỏi Sự Khéo Léo:
- Trong ngành công nghiệp ô tô và các ngành sản xuất lớn, hàn 3D là một ứng dụng quan trọng. Thị giác 3D cung cấp thông tin liên tục về vị trí và hướng của mối hàn trong không gian 3 chiều, cho phép robot điều chỉnh đường hàn một cách linh hoạt, đảm bảo chất lượng mối hàn tối ưu ngay cả trên các bề mặt phức tạp hoặc có sự biến dạng nhiệt.
- Đối với việc sơn phủ bề mặt phức tạp, thị giác 3D giúp robot lập trình đường đi của vòi phun sơn, đảm bảo lớp sơn phủ đều, không bị thừa hoặc thiếu trên các bề mặt có hình dạng 3D phức tạp, giảm lượng sơn tiêu thụ và tăng chất lượng hoàn thiện.
- Trong gia công và cắt gọt 3D, thị giác 3D hướng dẫn robot thực hiện các thao tác cắt, mài, hoặc khoan trên các chi tiết có hình dạng 3D, đảm bảo độ chính xác của đường cắt và hình dạng cuối cùng của sản phẩm, giảm thiểu lỗi và tối ưu hóa quy trình gia công.
4. Lợi Ích Khi Tích Hợp Hệ Thống Thị Giác Máy 3D Với Robot Công Nghiệp
Sự tích hợp giữa hệ thống thị giác máy 3D và robot công nghiệp mang lại những lợi ích chiến lược và đột phá, định hình lại cách thức sản xuất trong nhiều ngành công nghiệp.

- Khả năng xử lý vật thể phức tạp: Robot giờ đây có thể làm việc hiệu quả với các vật thể có hình dạng 3D phức tạp, bề mặt cong, hoặc nằm lộn xộn trong không gian. Điều này mở rộng đáng kể phạm vi ứng dụng của robot, cho phép tự động hóa các tác vụ mà trước đây chỉ có thể thực hiện bằng sức người hoặc với chi phí rất cao.
- Độ chính xác và độ tin cậy cao: Thị giác 3D cung cấp thông tin tọa độ X, Y, Z và hướng của vật thể một cách chính xác tuyệt đối trong không gian 3 chiều. Dữ liệu này giúp robot thực hiện các tác vụ tinh vi như lắp ráp vi mô, hàn chính xác, hoặc gia công đòi hỏi dung sai chặt chẽ với độ tin cậy vượt trội, giảm thiểu sai sót và đảm bảo chất lượng sản phẩm đồng đều.
- Tự động hóa các tác vụ đòi hỏi sự khéo léo: Các quy trình từng được coi là “không thể tự động hóa” do yêu cầu sự khéo léo và khả năng thích ứng của con người, như gắp đặt các chi tiết hỗn loạn từ thùng chứa (bin picking) hoặc lắp ráp các bộ phận phức tạp, giờ đây có thể được thực hiện tự động bởi robot trang bị thị giác 3D. Điều này giải phóng con người khỏi các công việc lặp đi lặp lại, nhàm chán hoặc nguy hiểm.
- Tăng năng suất và giảm chi phí: Việc tự động hóa các tác vụ phức tạp bằng robot có thị giác 3D giúp tăng tốc độ sản xuất, giảm thời gian chu kỳ và tối ưu hóa việc sử dụng nguyên vật liệu. Đồng thời, giảm thiểu lỗi và phế phẩm cũng trực tiếp dẫn đến việc tiết kiệm chi phí vận hành, cải thiện hiệu quả kinh tế tổng thể của dây chuyền sản xuất.
- Mở rộng phạm vi ứng dụng của robot: Khả năng “nhìn” và “hiểu” không gian 3D mở ra cánh cửa cho robot tham gia vào nhiều lĩnh vực và ứng dụng mới, từ sản xuất ô tô, điện tử, hàng không vũ trụ đến y tế và logistics, nơi mà trước đây robot 2D còn hạn chế.
- Tối ưu hóa quy trình sản xuất: Với dữ liệu 3D chính xác, các hệ thống có thể tối ưu hóa đường đi của robot, giảm va chạm, và nâng cao hiệu suất làm việc. Điều này giúp tận dụng tối đa năng lực của robot và tối thiểu hóa thời gian ngừng hoạt động.
5. Thách Thức và Xu Hướng Phát Triển
Mặc dù mang lại nhiều lợi ích, việc triển khai hệ thống thị giác máy 3D trong sản xuất công nghiệp vẫn phải đối mặt với một số thách thức đáng kể. Tuy nhiên, công nghệ này đang không ngừng phát triển, hứa hẹn những đột phá trong tương lai.
Thách thức:
- Chi phí đầu tư ban đầu: So với các hệ thống thị giác máy 2D, các giải pháp thị giác máy 3D thường có chi phí đầu tư ban đầu cao hơn đáng kể. Điều này bao gồm chi phí cho các cảm biến 3D chuyên dụng (camera lập thể, cảm biến TOF, máy quét laser), bộ xử lý mạnh mẽ hơn để xử lý lượng dữ liệu lớn, và phần mềm phức tạp. Mặc dù lợi ích về lâu dài là rõ ràng, rào cản về chi phí có thể khiến các doanh nghiệp nhỏ và vừa ngần ngại đầu tư.
- Độ phức tạp trong xử lý dữ liệu: Dữ liệu 3D, thường dưới dạng đám mây điểm (point cloud) hoặc lưới đa giác, có dung lượng lớn hơn nhiều so với hình ảnh 2D và đòi hỏi các thuật toán phức tạp hơn để xử lý, phân tích và trích xuất thông tin có ý nghĩa. Điều này yêu cầu đội ngũ kỹ sư có chuyên môn sâu về xử lý dữ liệu 3D và lập trình robot.
- Tốc độ xử lý: Đối với một số ứng dụng yêu cầu tốc độ cao trong dây chuyền sản xuất hàng loạt, tốc độ thu thập và xử lý dữ liệu 3D vẫn còn là một thách thức. Việc chuyển đổi từ dữ liệu thô sang thông tin hữu ích cho robot cần thời gian, có thể tạo ra nút thắt cổ chai trong quy trình sản xuất tốc độ cao.
- Điều kiện môi trường: Một số công nghệ thị giác 3D, đặc biệt là ánh sáng cấu trúc, rất nhạy cảm với ánh sáng môi trường. Ánh sáng mạnh từ bên ngoài hoặc sự thay đổi đột ngột về chiếu sáng có thể ảnh hưởng đến độ chính xác và độ tin cậy của hệ thống. Bề mặt vật liệu (phản chiếu, trong suốt, hấp thụ ánh sáng) cũng có thể gây khó khăn cho việc thu thập dữ liệu 3D chính xác.
Xu hướng phát triển:
- Giảm chi phí và tăng tính khả dụng: Các nhà sản xuất đang tập trung vào việc giảm chi phí sản xuất cảm biến 3D và phát triển các giải pháp phần mềm mã nguồn mở hoặc có chi phí thấp hơn, nhằm làm cho công nghệ thị giác máy 3D dễ tiếp cận hơn với đa dạng các doanh nghiệp. Sự cạnh tranh và đổi mới công nghệ cũng góp phần giảm giá thành tổng thể.
- Tăng tốc độ và hiệu quả xử lý: Các thuật toán xử lý dữ liệu 3D ngày càng được tối ưu hóa, kết hợp với sự phát triển của phần cứng mạnh mẽ hơn (GPU, FPGA), giúp tăng tốc độ thu thập và phân tích dữ liệu 3D lên đáng kể. Điều này cho phép thị giác 3D được ứng dụng trong các quy trình sản xuất tốc độ cao.
- Tích hợp AI và Học sâu (Deep Learning): Sự kết hợp giữa thị giác máy 3D với Trí tuệ nhân tạo (AI) và Học sâu (Deep Learning) là một xu hướng mạnh mẽ. Các mạng thần kinh tích chập (CNN) và các mô hình học sâu khác có thể xử lý trực tiếp dữ liệu đám mây điểm 3D hoặc bản đồ độ sâu, giúp hệ thống có khả năng nhận diện vật thể, phân loại lỗi và đưa ra quyết định thông minh hơn, ngay cả trong các tình huống phức tạp và không được lập trình trước. Điều này giúp robot trở nên “nhạy bén” và tự chủ hơn.
- Phát triển cảm biến lai (Hybrid Sensors): Xu hướng phát triển các cảm biến tích hợp nhiều công nghệ (ví dụ: kết hợp Stereo Vision và Structured Light) để khắc phục nhược điểm của từng loại và tối ưu hóa hiệu suất trong các điều kiện khác nhau.
- Ứng dụng trong các lĩnh vực mới: Ngoài sản xuất công nghiệp truyền thống, hệ thống thị giác máy 3D đang mở rộng mạnh mẽ sang các lĩnh vực như xe tự lái (phát hiện vật cản, lập bản đồ môi trường), y tế (chẩn đoán hình ảnh, hỗ trợ phẫu thuật), xây dựng (giám sát công trình, đo đạc), nông nghiệp thông minh (kiểm tra cây trồng, thu hoạch tự động), và logistics (phân loại, xếp dỡ hàng hóa trong kho).
6. Kết Luận
Tổng kết lại, hệ thống thị giác máy 3D đã khẳng định vai trò là một trong những công nghệ cốt lõi, nâng tầm năng lực của robot công nghiệp và định hình tương lai của ngành sản xuất công nghiệp hiện đại. Khả năng thu thập và xử lý thông tin ba chiều chính xác đã trang bị cho robot khả năng “nhìn” và “hiểu” thế giới vật lý một cách toàn diện, vượt qua những giới hạn của thị giác 2D. Từ việc tự động hóa quy trình gắp đặt vật thể ngẫu nhiên phức tạp, đến kiểm tra chất lượng bề mặt 3D tinh vi, hay hướng dẫn robot thực hiện các tác vụ đòi hỏi sự khéo léo cao, thị giác máy 3D không chỉ nâng cao độ chính xác, hiệu suất mà còn mở rộng đáng kể phạm vi ứng dụng của robot, thúc đẩy mạnh mẽ quá trình tự động hóa.
Mặc dù vẫn còn những thách thức về chi phí và độ phức tạp, sự phát triển nhanh chóng của các công nghệ cảm biến, cùng với sự tích hợp ngày càng sâu rộng của Trí tuệ nhân tạo (AI) và Học sâu (Deep Learning), đang dần khắc phục những rào cản này. Tương lai của hệ thống thị giác máy 3D hứa hẹn sẽ mang đến những giải pháp mạnh mẽ hơn, dễ triển khai hơn, và hiệu quả hơn nữa, tiếp tục là động lực chính cho sự phát triển của robot công nghiệp và toàn bộ ngành sản xuất trong bối cảnh cuộc cách mạng công nghiệp 4.0 đang diễn ra mạnh mẽ. Việc đầu tư và khai thác tiềm năng của hệ thống thị giác máy 3D không chỉ là một lựa chọn mà là một bước đi chiến lược, thiết yếu để các doanh nghiệp duy trì khả năng cạnh tranh và tối ưu hóa hiệu quả hoạt động trong kỷ nguyên số.