
Robot công nghiệp
Phân Loại Robot Công Nghiệp: Cẩm Nang Toàn Diện
Cập nhật lần cuối 22 Tháng 7, 2025 bởi nthung
Robot công nghiệp là một trụ cột không thể thay thế của nền sản xuất hiện đại, định hình lại cách thức các nhà máy vận hành thông qua tự động hóa chính xác và hiệu quả.
Việc nắm vững các phương pháp phân loại robot công nghiệp chính là chìa khóa để khai phá toàn bộ tiềm năng của công nghệ này, cho phép các kỹ sư, nhà quản lý và nhà sản xuất đưa ra quyết định sáng suốt nhất.
Sự phân loại không chỉ đơn thuần là việc dán nhãn; nó là một hệ thống logic giúp xác định cấu trúc, khả năng, không gian làm việc và ứng dụng lý tưởng của từng loại robot, từ đó tối ưu hóa năng suất, đảm bảo chất lượng sản phẩm đồng nhất và giải phóng con người khỏi những công việc nguy hiểm, lặp đi lặp lại.
Bài viết này sẽ cung cấp một cẩm nang toàn diện, đi sâu vào từng phương pháp phân loại robot công nghiệp, từ những tiêu chí cơ bản nhất như cấu trúc hình học đến các khía cạnh thực tiễn như ứng dụng chuyên biệt và nhà sản xuất.
Việc tìm hiểu chi tiết các chủ đề này là cực kỳ quan trọng, bởi nó xây dựng một nền tảng kiến thức vững chắc, giúp người đọc không chỉ nhận biết được các loại robot khác nhau mà còn hiểu được tại sao một loại robot cụ thể lại là lựa chọn tối ưu cho một nhiệm vụ nhất định.
Từ đó, chúng ta có thể điều hướng thế giới phức tạp của tự động hóa một cách tự tin, lựa chọn đúng công cụ cho đúng công việc và thúc đẩy sự đổi mới trong mọi lĩnh vực công nghiệp.
Phân Loại Theo Cấu Trúc & Dạng Hình Học (Form Factor)
Phân loại theo cấu trúc cơ khí và dạng hình học là phương pháp nền tảng nhất để xác định một robot công nghiệp, bởi lẽ cấu trúc động học của robot quyết định trực tiếp đến các đặc tính vận hành cốt lõi của nó.
Các đặc tính này bao gồm phạm vi không gian mà robot có thể tiếp cận (không gian làm việc), mức độ linh hoạt trong chuyển động, khả năng chịu tải, độ cứng vững và độ chính xác lặp lại.
Mỗi cấu trúc được thiết kế để tối ưu hóa cho một tập hợp các nhiệm vụ cụ thể, do đó việc hiểu rõ chúng là bước đầu tiên trong việc lựa chọn giải pháp tự động hóa phù hợp.
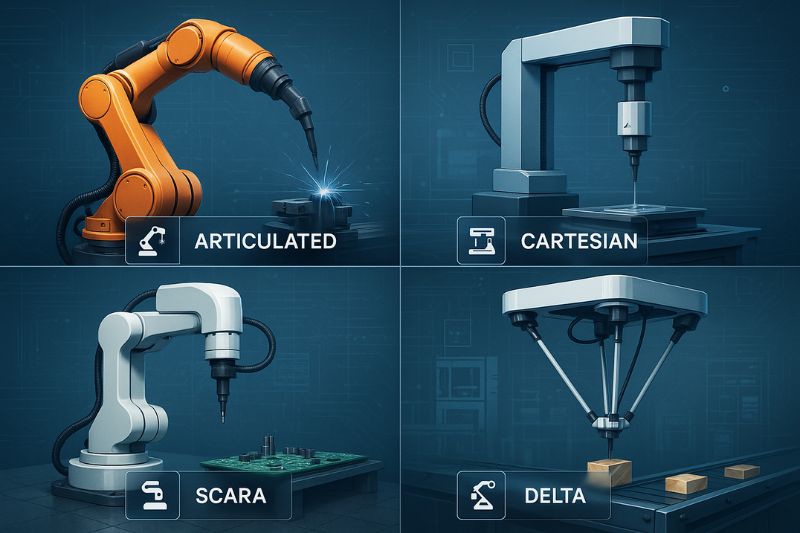
Cánh tay Robot có Khớp nối (Articulated Robot)
Cánh tay robot có khớp nối sở hữu một cấu trúc cơ khí bao gồm các khớp xoay (revolute joints) nối tiếp nhau, mô phỏng theo hoạt động của cánh tay con người.
Đây là loại robot công nghiệp phổ biến và linh hoạt nhất hiện nay, với cấu trúc thường bao gồm một đế xoay, khớp vai, khớp khuỷu và một tổ hợp cổ tay phức tạp có thể chứa thêm ba khớp xoay nữa.
Sự kết hợp của các khớp này cho phép robot đạt tới bất kỳ điểm nào trong không gian làm việc hình cầu của nó với bất kỳ hướng nào, mang lại sự khéo léo vượt trội.
Do tính linh hoạt cao, robot khớp nối là lựa chọn hàng đầu cho vô số ứng dụng phức tạp như hàn hồ quang theo đường cong, sơn các bề mặt 3D, lắp ráp tinh vi, và cấp phôi cho máy móc (machine tending).
Tuy nhiên, động học của chúng phức tạp hơn, đòi hỏi các bộ điều khiển và thuật toán lập trình tinh vi để quản lý chuyển động.
Robot Descartes/Gantry (Cartesian Robot)
Robot Descartes, hay còn gọi là robot giàn (Gantry), hoạt động dựa trên một hệ tọa độ Descartes ba chiều, với các chuyển động được thực hiện dọc theo ba trục tuyến tính vuông góc với nhau (X, Y, Z).
Cấu trúc này mang lại nhiều lợi thế đáng kể: chúng cực kỳ cứng vững, có khả năng đạt độ chính xác và độ lặp lại rất cao, và việc lập trình chuyển động điểm-tới-điểm rất đơn giản và trực quan.
Không gian làm việc của chúng là một hình hộp chữ nhật, dễ dàng xác định và tối ưu hóa.
Robot Descartes thường được sử dụng trong các ứng dụng đòi hỏi độ chính xác cao trên một khu vực rộng lớn, chẳng hạn như gắp và đặt sản phẩm trên băng chuyền, cấp phôi cho máy CNC, phân phối keo, hoặc in 3D khổ lớn.
Nhược điểm chính của chúng là cấu trúc cồng kềnh, chiếm nhiều diện tích và thường kém linh hoạt hơn so với robot khớp nối.
Robot SCARA (Selective Compliance Assembly Robot Arm)
Robot SCARA được thiết kế đặc biệt cho các nhiệm vụ lắp ráp tốc độ cao, với cấu trúc bao gồm hai khớp xoay song song với mặt phẳng làm việc và một trục tịnh tiến (trục Z) để di chuyển lên xuống.
Thiết kế độc đáo này giúp robot có độ cứng vững cao theo phương thẳng đứng nhưng lại linh hoạt theo phương ngang, một đặc tính lý tưởng cho việc lắp các linh kiện vào lỗ hoặc các vị trí xác định trước.
Robot SCARA nổi tiếng với tốc độ và độ chính xác vượt trội trong một mặt phẳng, khiến chúng trở thành lựa chọn không thể thiếu trong ngành công nghiệp điện tử để lắp ráp bảng mạch in (PCB), gắp và đặt các linh kiện nhỏ, và đóng gói sản phẩm.
Không gian làm việc của chúng có hình dạng giống như một quả thận, và chúng bị giới hạn trong các hoạt động trên mặt phẳng.
Robot Delta (Parallel Robot)
Robot Delta, hay robot song song, có một thiết kế đặc trưng với ba hoặc bốn cánh tay song song nối từ một đế trên cao xuống một bệ di động duy nhất.
Cấu trúc này cho phép các động cơ được đặt cố định trên đế, làm giảm đáng kể khối lượng và quán tính của các bộ phận chuyển động.
Kết quả là robot Delta có thể đạt được tốc độ và gia tốc cực kỳ cao, vượt xa các loại robot khác.
Chúng là “ông hoàng tốc độ” trong các ứng dụng gắp và đặt (pick-and-place) khối lượng lớn, đặc biệt trong ngành công nghiệp thực phẩm, dược phẩm và điện tử, nơi chúng có thể gắp hàng trăm sản phẩm mỗi phút từ băng chuyền đang chạy.
Tuy nhiên, chúng thường có tải trọng thấp hơn và không gian làm việc hạn chế hơn so với các loại robot khác.
Xem thêm: Robot Delta
Các loại cấu trúc khác
Ngoài các loại phổ biến trên, còn có các cấu trúc robot khác ít gặp hơn nhưng vẫn có vai trò trong các ứng dụng đặc thù:
- Robot Trụ (Cylindrical Robot):
- Có một khớp xoay ở đế và hai khớp tịnh tiến, tạo ra một không gian làm việc hình trụ.
- Chúng từng phổ biến trong các nhiệm vụ xử lý máy và lắp ráp đơn giản.
- Robot Cầu (Spherical/Polar Robot):
- Sử dụng hai khớp xoay và một khớp tịnh tiến để tạo ra một không gian làm việc hình cầu.
- Đây là một trong những thiết kế robot công nghiệp đầu tiên, điển hình là robot Unimate, nhưng ngày nay đã phần lớn được thay thế bởi robot khớp nối linh hoạt hơn.
Bảng 1: So sánh các loại cấu trúc Robot công nghiệp phổ biến
| Loại Robot | Cấu trúc chính | Hình dạng không gian làm việc | Ưu điểm | Nhược điểm | Ứng dụng tiêu biểu |
|---|---|---|---|---|---|
| Articulated | Các khớp xoay nối tiếp | Hình cầu phức tạp | Rất linh hoạt, tầm với lớn, khéo léo | Động học phức tạp, giá thành cao hơn | Hàn, sơn, lắp ráp phức tạp, machine tending |
| Cartesian | Ba trục tịnh tiến (X-Y-Z) | Hình hộp chữ nhật | Độ chính xác cao, cứng vững, dễ lập trình, tải trọng lớn | Cồng kềnh, chiếm diện tích, tốc độ thấp hơn | Gắp và đặt, cấp phôi CNC, phân phối keo, in 3D |
| SCARA | Hai khớp xoay song song, một trục tịnh tiến | Hình quả thận | Tốc độ rất cao, độ chính xác xuất sắc trong mặt phẳng | Hạn chế trong các tác vụ 3D phức tạp | Lắp ráp điện tử, gắp và đặt linh kiện nhỏ |
| Delta | Các tay đòn song song | Vòm bán cầu | Tốc độ và gia tốc cực cao | Tải trọng thấp, không gian làm việc hạn chế | Gắp và đặt tốc độ cao (thực phẩm, dược phẩm) |
Phân Loại Theo Số Bậc Tự Do (Degrees of Freedom – DoF)
Số bậc tự do của một robot công nghiệp định nghĩa số lượng các trục chuyển động độc lập mà robot đó có thể thực hiện, và đây là một thông số kỹ thuật cốt lõi quyết định trực tiếp đến sự linh hoạt và khả năng thao tác của nó.
Mỗi bậc tự do tương ứng với một khớp (xoay hoặc tịnh tiến), cho phép robot di chuyển theo một cách cụ thể.
Một robot cần tối thiểu ba bậc tự do để có thể định vị dụng cụ cuối (end-effector) tại bất kỳ điểm nào trong không gian ba chiều, và cần thêm các bậc tự do nữa để có thể định hướng dụng cụ đó theo các góc khác nhau.
Việc lựa chọn đúng số bậc tự do là rất quan trọng để cân bằng giữa khả năng của robot và chi phí đầu tư, tránh việc mua một robot quá phức tạp cho một nhiệm vụ đơn giản.
- Robot 2-3 Bậc Tự Do:
- Các robot có số bậc tự do thấp thường được dành cho các nhiệm vụ đơn giản, có tính lặp lại cao trong một không gian hạn chế.
- Một cánh tay robot công nghiệp 3 bậc tự do, chẳng hạn như robot Descartes (X, Y, Z) hoặc robot SCARA (hai khớp xoay, một tịnh tiến), rất hiệu quả cho các công việc gắp và đặt trên một mặt phẳng hoặc giữa các mặt phẳng song song, nơi không yêu cầu sự thay đổi về góc tiếp cận của dụng cụ.
- Robot 4-5 Bậc Tự Do:
- Khi một nhiệm vụ đòi hỏi thêm một chút linh hoạt về định hướng, robot 4 hoặc 5 bậc tự do sẽ được sử dụng.
- Robot 4 bậc tự do thường có thêm một trục xoay ở cổ tay, cho phép nó xoay vật thể.
- Chúng rất phổ biến trong các ứng dụng xếp hàng lên pallet (palletizing), nơi robot cần gắp các thùng hàng và xoay chúng để xếp vào đúng vị trí.
- Một đồ án robot công nghiệp 5 bậc tự do có thể thực hiện các công việc phức tạp hơn như hàn hồ quang đơn giản hoặc phun keo theo các đường không quá phức tạp, nơi chỉ cần kiểm soát một phần góc nghiêng của dụng cụ.
- Robot 6 Bậc Tự Do:
- Đây được coi là “tiêu chuẩn vàng” trong ngành công nghiệp robot.
- Một cánh tay robot công nghiệp có 6 bậc tự do sở hữu sự linh hoạt tối đa, với ba trục đầu tiên dùng để định vị cổ tay trong không gian (giống như vai và khuỷu tay người) và ba trục cuối dùng để định hướng dụng cụ (giống như cổ tay người).
- Sự kết hợp này cho phép robot tiếp cận một điểm từ vô số góc độ khác nhau, khiến nó trở nên cực kỳ linh hoạt cho các ứng dụng phức tạp nhất như hàn các đường nối 3D, sơn các bộ phận có hình dạng phức tạp, gia công cơ khí, và lắp ráp các chi tiết đòi hỏi sự khéo léo.
- Robot 7+ Bậc Tự Do:
- Các robot có nhiều hơn 6 bậc tự do được gọi là robot dư thừa (redundant robots).
- Bậc tự do thừa này mang lại khả năng tránh chướng ngại vật một cách linh hoạt mà không cần phải di chuyển dụng cụ cuối ra khỏi đường đi đã định.
- Chúng rất hữu ích trong các không gian làm việc chật hẹp hoặc khi cần tương tác gần với con người, điển hình là trong lĩnh vực robot cộng tác (cobots) và y tế.
Danh sách: Mối quan hệ giữa Số Bậc Tự Do và Ứng dụng
- 2-3 DoF:
- Gắp và đặt sản phẩm trên băng chuyền.
- Sắp xếp sản phẩm vào khay.
- Các nhiệm vụ phân phối đơn giản.
- 4 DoF:
- Xếp và dỡ hàng hóa từ pallet.
- Cấp phôi cho máy ép, máy dập.
- Xử lý máy móc (Machine Tending).
- 5 DoF:
- Hàn hồ quang các đường thẳng hoặc cong đơn giản.
- Phun keo, sơn các bề mặt không quá phức tạp.
- Cắt bằng tia nước (Waterjet cutting).
- 6 DoF:
- Hàn điểm và hàn hồ quang phức tạp trong ngành ô tô.
- Sơn toàn bộ thân xe.
- Lắp ráp tinh vi các bộ phận cơ khí và điện tử.
- Mài, đánh bóng và loại bỏ bavia.
- 7+ DoF:
- Lắp ráp trong không gian hẹp.
- Ứng dụng y tế (phẫu thuật).
- Tương tác an toàn với con người trong môi trường làm việc chung.
Phân Loại Theo Ứng Dụng & Chức Năng (Application/Function)
Phân loại theo ứng dụng là phương pháp nhóm các robot công nghiệp dựa trên chức năng chuyên biệt mà chúng được tối ưu hóa để thực hiện, phản ánh trực tiếp nhu cầu thực tế của thị trường sản xuất.
Thay vì chỉ tập trung vào cấu trúc, cách tiếp cận này xem xét toàn bộ giải pháp robot, bao gồm cả dụng cụ đầu cuối (end-effector), phần mềm chuyên dụng và các cảm biến đi kèm để hoàn thành một nhiệm vụ cụ thể.
Đây là cách phân loại rất hữu ích cho các doanh nghiệp khi tìm kiếm một giải pháp “chìa khóa trao tay” cho một vấn đề sản xuất cụ thể, giúp họ dễ dàng hình dung ứng dụng robot trong công nghiệp và lợi tức đầu tư (ROI).
Các Ứng Dụng Phổ Biến
- Robot Hàn (Welding Robot):
- Đây là một trong những ứng dụng lớn và lâu đời nhất của robot công nghiệp.
- Robot hàn công nghiệp được trang bị mỏ hàn hồ quang (arc welding) hoặc kìm hàn điểm (spot welding) và được lập trình để di chuyển dọc theo các đường nối với tốc độ và khoảng cách không đổi, tạo ra các mối hàn chất lượng cao và đồng nhất.
- Chúng là xương sống của ngành công nghiệp ô tô và sản xuất kim loại.
Xem thêm: Robot Hàn Công nghiệp
- Robot Sơn (Painting Robot):
- Các robot này được thiết kế đặc biệt để hoạt động an toàn trong môi trường dễ cháy nổ.
- Chúng có các cánh tay thon dài, linh hoạt để tiếp cận các bề mặt phức tạp và được trang bị các đầu phun sơn chuyên dụng.
- Phần mềm của chúng cho phép tạo ra các đường đi mượt mà, đảm bảo lớp sơn được phủ đều, giảm thiểu lãng phí sơn và bảo vệ công nhân khỏi việc hít phải hơi sơn độc hại.
- Robot Xử lý Vật liệu (Material Handling Robot):
- Đây là một danh mục rộng lớn bao gồm nhiều nhiệm vụ di chuyển vật thể.
- Robot Gắp và Đặt (Pick and Place):
- Thường là các robot Delta hoặc SCARA tốc độ cao, chuyên dùng để di chuyển nhanh các sản phẩm nhẹ từ vị trí này sang vị trí khác, ví dụ như cánh tay robot gắp sản phẩm trong công nghiệp thực phẩm.
- Robot Xếp Dỡ Pallet (Palletizing):
- Là các robot lớn, có tải trọng cao và tầm với xa, được lập trình để tự động xếp các hộp hoặc bao sản phẩm lên pallet theo một mẫu định sẵn.
- Cấp phôi và Xử lý máy (Machine Tending):
- Robot thực hiện công việc đơn điệu là nạp phôi vào và lấy sản phẩm ra khỏi các máy móc như máy CNC, máy ép nhựa.
- Các loại cơ cấu robot gắp phôi trong công nghiệp được thiết kế để xử lý an toàn các bộ phận kim loại, nhựa.
- Robot Gắp và Đặt (Pick and Place):
- Đây là một danh mục rộng lớn bao gồm nhiều nhiệm vụ di chuyển vật thể.
- Robot Lắp Ráp (Assembly Robot):
- Các robot này đòi hỏi độ chính xác và độ lặp lại cực cao để lắp ghép các bộ phận lại với nhau.
- Chúng thường được trang bị các cảm biến lực và hệ thống thị giác máy (machine vision) để đảm bảo các bộ phận được lắp đúng vị trí và với lực phù hợp.
- Các ứng dụng từ lắp ráp điện thoại thông minh đến động cơ ô tô.
Ứng Dụng trong các Ngành Đặc Thù
Ngoài các chức năng chung, robot còn được phát triển cho các ngành công nghiệp rất cụ thể, cho thấy mức độ thâm nhập sâu rộng của tự động hóa:
- Robot trong công nghiệp dệt may: Thực hiện các công việc như cắt vải tự động, vận chuyển cuộn vải, hoặc thậm chí là may các đường may đơn giản.
- Robot trong công nghiệp đúc: Chịu trách nhiệm rót kim loại nóng chảy, lấy các vật đúc nóng ra khỏi khuôn, và phun các chất chống dính.
- Robot công nghiệp dùng cho máy ép phun nhựa: Nhanh chóng lấy các sản phẩm nhựa ra khỏi máy ép ngay sau khi chu trình kết thúc, và thường thực hiện luôn các công việc phụ như cắt cuống phun (gate).
- Robot trong ngành thực phẩm và nông nghiệp: Từ việc gắp và đóng gói sôcôla, trang trí bánh kem, đến các hệ thống phức tạp như nuôi gà công nghiệp lấy trứng bằng robot hay vắt sữa bò tự động.
- Robot hút bụi công nghiệp: Các robot di động tự hành (AMR) được trang bị hệ thống làm sạch để vệ sinh các khu vực rộng lớn như nhà kho, sân bay, bệnh viện.
Bảng 2: Chi tiết các ứng dụng chuyên biệt của Robot Công nghiệp
| Lĩnh vực Ứng dụng | Nhiệm vụ Cụ thể | Loại Robot Thường Dùng | Yêu cầu Kỹ thuật Chính |
|---|---|---|---|
| Hàn Kim Loại | Hàn điểm thân xe ô tô, hàn hồ quang khung xe máy. | Articulated 6 trục | Độ lặp lại cao, đường đi chính xác, chịu được môi trường công nghiệp nặng. |
| Sơn & Phun Phủ | Sơn vỏ ô tô, phun keo lên kính chắn gió. | Articulated 6 trục (chống cháy nổ) | Chuyển động mượt mà, không gian làm việc lớn, an toàn trong môi trường nguy hiểm. |
| Lắp Ráp Điện Tử | Gắn chip lên bảng mạch, lắp ráp điện thoại. | SCARA, Articulated 6 trục nhỏ | Tốc độ cực cao, độ chính xác ở mức micromet, có thể tích hợp vision. |
| Đóng Gói Thực Phẩm | Gắp bánh kẹo, xúc xích vào khay. | Delta, SCARA | Tốc độ rất cao, vật liệu chuẩn an toàn thực phẩm, dễ vệ sinh. |
| Xếp Dỡ Hàng Hóa | Xếp các thùng bia, bao xi măng lên pallet. | Articulated 4-5 trục | Tải trọng lớn, tầm với xa, phần mềm tạo mẫu pallet chuyên dụng. |
Phân Loại Theo Nhà Sản Xuất (Manufacturer)
Phân loại theo nhà sản xuất là một cách tiếp cận thực tế trên thị trường, nơi các robot thường được nhận diện thông qua thương hiệu, hệ sinh thái phần mềm, và dịch vụ hỗ trợ đi kèm.
Mỗi nhà sản xuất lớn đều có những thế mạnh riêng, tập trung vào các phân khúc thị trường hoặc loại robot nhất định, và xây dựng một cộng đồng người dùng trung thành xung quanh các nền tảng công nghệ của họ.
Đối với các nhà tích hợp hệ thống và người dùng cuối, việc lựa chọn một thương hiệu không chỉ là mua một cỗ máy, mà còn là đầu tư vào một hệ sinh thái bao gồm phần mềm lập trình, các tùy chọn phần cứng, tài liệu đào tạo và mạng lưới hỗ trợ kỹ thuật toàn cầu.
Các “Ông Lớn” trong Ngành
- FANUC (Nhật Bản):
- Là một trong những nhà sản xuất robot công nghiệp và hệ thống CNC lớn nhất thế giới, FANUC nổi bật với màu vàng đặc trưng.
- Robot công nghiệp FANUC nổi tiếng về độ tin cậy, hiệu suất cao và sự hiện diện mạnh mẽ trong ngành công nghiệp ô tô và gia công kim loại.
- Hệ điều hành và ngôn ngữ lập trình Karel của họ cực kỳ mạnh mẽ và ổn định.
- ABB (Thụy Sĩ – Thụy Điển):
- ABB là một gã khổng lồ toàn cầu trong lĩnh vực điện lực và tự động hóa.
- Robot công nghiệp ABB được biết đến với sự đổi mới, đặc biệt là phần mềm mô phỏng và lập trình ngoại tuyến RobotStudio, được coi là một trong những phần mềm tốt nhất trong ngành.
- Họ có danh mục sản phẩm rất rộng, từ các robot nhỏ đến các robot có tải trọng hàng tấn.
- KUKA (Đức):
- Với màu cam đặc trưng, robot công nghiệp KUKA là biểu tượng cho kỹ thuật cơ khí chính xác của Đức.
- Họ có một vị thế vững chắc trong ngành công nghiệp ô tô châu Âu và nổi tiếng với các robot tải trọng nặng và các giải pháp sáng tạo, bao gồm cả robot cộng tác LBR iiwa.
- Yaskawa Motoman (Nhật Bản):
- Yaskawa là một nhà tiên phong trong ngành, đã phát triển nhiều công nghệ robot quan trọng.
- Robot Motoman của họ (thường có màu xanh lam) được đánh giá cao về tốc độ, độ chính xác và được sử dụng rộng rãi trong các ứng dụng hàn hồ quang, xử lý vật liệu.
- Universal Robots (Đan Mạch):
- Mặc dù là một công ty tương đối trẻ, Universal Robots (UR) đã tạo ra một cuộc cách mạng bằng cách tiên phong trong lĩnh vực robot cộng tác (cobot).
- Robot công nghiệp Universal được thiết kế để dễ sử dụng, lập trình nhanh chóng và làm việc an toàn bên cạnh con người, mở ra cánh cửa tự động hóa cho các doanh nghiệp vừa và nhỏ.
- Omron (Nhật Bản):
- Robot công nghiệp Omron là một phần của một danh mục giải pháp tự động hóa toàn diện hơn.
- Họ mạnh về các robot di động tự hành (AMR) và gần đây đã mua lại Adept Technology, một công ty tiên phong về robot SCARA và Delta, để củng cố vị thế của mình trong lĩnh vực robot cố định.
Xem thêm: Các Hãng Robot Công Nghiệp
Các Cách Phân Loại Khác
Ngoài các tiêu chí kỹ thuật chính, robot công nghiệp còn được phân loại dựa trên các yếu tố thương mại và lịch sử, phản ánh vòng đời sản phẩm và sự tiến hóa của công nghệ.
Các cách phân loại này có ý nghĩa quan trọng đối với các quyết định mua sắm, bảo trì và hiểu biết về bối cảnh phát triển của ngành.
Theo Tình trạng (Condition)
- Robot mới:
- Là robot được mua trực tiếp từ nhà sản xuất hoặc nhà phân phối ủy quyền, đi kèm với bảo hành đầy đủ, hỗ trợ kỹ thuật và công nghệ mới nhất.
- Đây là lựa chọn an toàn nhất nhưng cũng tốn kém nhất.
- Robot cũ / Robot bãi:
- Robot công nghiệp cũ là các robot đã qua sử dụng, được tân trang và bán lại với giá thấp hơn đáng kể.
- Robot công nghiệp bãi thường chỉ các robot đã hết vòng đời sử dụng tại các nhà máy lớn và được bán thanh lý.
- Đây có thể là một lựa chọn kinh tế cho các công ty có ngân sách hạn hẹp hoặc cho các ứng dụng không đòi hỏi hiệu suất cao nhất.
- Tuy nhiên, việc mua robot cũ đi kèm với rủi ro về độ tin cậy, thiếu phụ tùng thay thế và công nghệ lỗi thời.
Theo Lịch sử phát triển (Historical Evolution)
Đôi khi, robot được phân loại hoặc nhắc đến dựa trên thế hệ hoặc giai đoạn phát triển công nghệ.
- Thế hệ đầu tiên:
- Bao gồm robot công nghiệp đầu tiên như Unimate, hoạt động bằng thủy lực, được điều khiển bởi các bộ điều khiển đơn giản và được sử dụng cho các nhiệm vụ nặng nhọc, nguy hiểm.
- Thế hệ robot chạy bằng điện:
- Sự ra đời của động cơ servo điện đã tạo ra một bước nhảy vọt, cho phép robot hoạt động nhanh hơn, chính xác hơn và sạch sẽ hơn.
- Giai đoạn từ những năm 1980, ví dụ như robot công nghiệp 1983, chứng kiến sự bùng nổ của loại robot này.
- Thế hệ thông minh:
- Bắt đầu từ khoảng robot công nghiệp từ năm 2010 trở đi, thế hệ này được đặc trưng bởi sự tích hợp của các cảm biến tiên tiến (thị giác, lực), khả năng kết nối mạng (Industry 4.0), và sự trỗi dậy của trí tuệ nhân tạo (AI) và robot cộng tác (cobots).
Kết Luận
Việc hiểu rõ các hệ thống phân loại robot công nghiệp khác nhau cung cấp một lăng kính toàn diện để đánh giá, lựa chọn và triển khai công nghệ tự động hóa một cách chiến lược và hiệu quả.
Các phương pháp phân loại này không hề loại trừ lẫn nhau mà bổ sung cho nhau, tạo nên một bức tranh mô tả hoàn chỉnh.
Một robot cụ thể có thể được định nghĩa là “một robot hàn hồ quang 6 bậc tự do của FANUC” – một mô tả kết hợp các tiêu chí về ứng dụng, số bậc tự do và nhà sản xuất.
Kiến thức này, được trình bày trong các giáo trình robot công nghiệp và bài giảng robot công nghiệp, là nền tảng cho bất kỳ ai muốn làm chủ lĩnh vực này.
Nhìn về tương lai, sự phát triển của trí tuệ nhân tạo, học máy và robot di động đang tiếp tục tạo ra các loại hình robot mới và các phương pháp phân loại mới.
Các robot di động có khả năng tự điều hướng, các cánh tay robot cộng tác có thể học hỏi từ con người, và các hệ thống robot được kết nối toàn cầu đang xóa mờ ranh giới giữa các danh mục truyền thống.
Tuy nhiên, những nguyên tắc phân loại cơ bản về cấu trúc, khả năng và ứng dụng sẽ luôn là điểm khởi đầu vững chắc.
Bằng cách nắm vững chúng, các doanh nghiệp có thể tự tin bước vào kỷ nguyên sản xuất thông minh, biến robot công nghiệp thành một lợi thế cạnh tranh thực sự và bền vững.