
Hệ thống DCS
Kỹ thuật điều khiển vòng lặp trong DCS: Khái niệm, nguyên lý và ứng dụng
Vòng lặp điều khiển là một cơ chế cốt lõi, đảm bảo sự ổn định và hiệu suất trong một hệ thống điều khiển phân tán (DCS). Nó đại diện cho trái tim của quá trình tự động hóa, biến các yêu cầu của người vận hành thành những hành động cụ thể và chính xác để duy trì các thông số của quy trình công nghiệp ở một giá trị mong muốn. Thiếu các vòng lặp điều khiển hiệu quả, hệ thống DCS chỉ là một tập hợp các thiết bị không có khả năng tự động, buộc người vận hành phải can thiệp thủ công liên tục, dẫn đến rủi ro và giảm năng suất. Bài viết này sẽ khám phá các kỹ thuật điều khiển vòng lặp trong DCS, từ những khái niệm cơ bản đến các ứng dụng phức tạp.
1. Khái niệm và Nguyên lý hoạt động của vòng lặp điều khiển
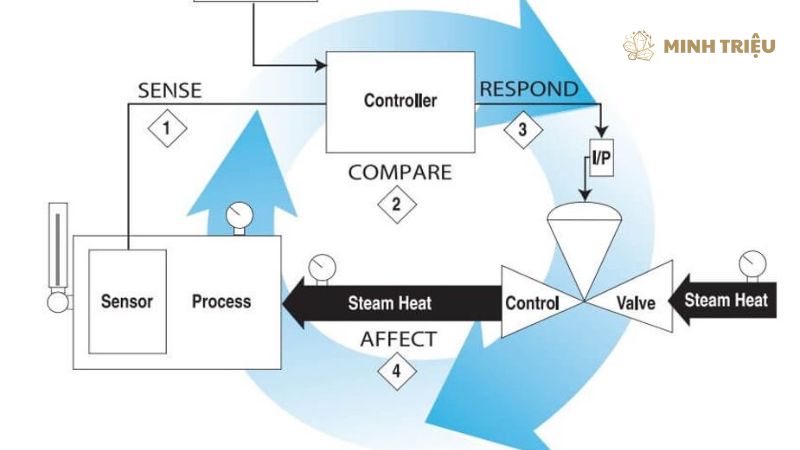
Nguyên lý hoạt động cơ bản của một vòng lặp điều khiển là gì và các thành phần chính của nó bao gồm những gì? Một vòng lặp điều khiển hoạt động dựa trên nguyên lý điều khiển phản hồi (feedback control). Nguyên lý này đề cập đến một cơ chế trong đó một biến đầu ra được đo lường, so sánh với một giá trị mong muốn (điểm đặt), và sự khác biệt này được sử dụng để điều chỉnh đầu vào của hệ thống.
Quy trình này được lặp lại liên tục để đảm bảo biến đầu ra luôn được duy trì ở giá trị mong muốn, bất chấp các yếu tố nhiễu loạn. Vòng lặp điều khiển tạo ra một chu trình tự điều chỉnh, tăng cường tính ổn định và chính xác của quy trình.
Các thành phần chính của một vòng lặp điều khiển kín bao gồm:
- Biến được điều khiển (Controlled Variable): Là biến vật lý mà chúng ta cần kiểm soát (ví dụ: nhiệt độ, áp suất, lưu lượng, mức chất lỏng).
- Điểm đặt (Setpoint): Là giá trị mong muốn của biến được điều khiển mà người vận hành cần duy trì.
- Bộ điều khiển (Controller): Là “bộ não” của vòng lặp. Nó nhận tín hiệu sai số giữa điểm đặt và biến được điều khiển, và tính toán tín hiệu điều chỉnh để gửi đi. Bộ điều khiển PID (Proportional-Integral-Derivative) là loại phổ biến nhất trong DCS.
- Bộ chấp hành (Final Control Element): Là thiết bị trực tiếp thực hiện lệnh điều chỉnh từ bộ điều khiển. Nó tác động trực tiếp vàoquy trình công nghiệpđể thay đổibiến được điều khiển. Ví dụ: van điều khiển, bơm, bộ gia nhiệt.
- Cảm biến (Sensor) và Bộ truyền động (Transmitter): Cảm biến đo lường biến được điều khiển trong quy trình và bộ truyền động chuyển đổi phép đo này thành một tín hiệu chuẩn (ví dụ: 4-20mA) để gửi đến bộ điều khiển.
2. Các loại Kỹ thuật điều khiển vòng lặp phổ biến trong DCS
Hệ thống DCS áp dụng nhiều loại vòng lặp điều khiển khác nhau, tùy thuộc vào độ phức tạp của quy trình công nghiệp.
Điều khiển vòng lặp đơn (Single Loop Control) là loại cơ bản nhất. Nó giám sát và điều khiển một biến duy nhất bằng một bộ điều khiển. Ví dụ, trong một bồn chứa, bộ điều khiển nhận tín hiệu từ một cảm biến mức chất lỏng, so sánh nó với điểm đặt, và điều chỉnh độ mở của một van để duy trì mức nước mong muốn.
Điều khiển tầng (Cascade Control) là một kỹ thuật điều khiển nâng cao hơn, sử dụng hai vòng lặp lồng vào nhau. Nó bao gồm một vòng lặp chính (primary loop) và một vòng lặp phụ (secondary loop). Vòng lặp chính điều khiển biến quan trọng nhất (ví dụ: nhiệt độ), và đầu ra của nó là điểm đặt cho vòng lặp phụ.

Vòng lặp phụ điều khiển một biến trung gian (ví dụ: lưu lượng) để đáp ứng điểm đặt của vòng lặp chính. Điều khiển tầng giúp hệ thống phản ứng nhanh hơn với các nhiễu loạn cục bộ, cải thiện đáng kể độ ổn định của quy trình. Điều khiển tỷ lệ (Ratio Control) duy trì một tỷ lệ cố định giữa hai biến. Ví dụ, trong một hệ thống pha trộn, bộ điều khiển đảm bảo tỷ lệ giữa hai dòng chất lỏng luôn ổn định, bất kể sự thay đổi về lưu lượng của dòng chính. Nó được ứng dụng rộng rãi trong các ngành công nghiệp như hóa dầu và thực phẩm.
Các loại vòng lặp điều khiển phức tạp khác bao gồm:
- Điều khiển vượt trước (Feed-forward Control): Nó dự đoán sự thay đổi của biến được điều khiển do các nhiễu loạn đầu vào và thực hiện điều chỉnh trước khi sai số xảy ra.
- Điều khiển lựa chọn (Selective Control): Nó lựa chọn tín hiệu đầu vào từ nhiều cảm biến và thực hiện điều khiển để duy trì giá trị tốt nhất cho quy trình.
- Điều khiển dựa trên mô hình (Model-based Control): Nó sử dụng một mô hình toán học của quy trình để tính toán tín hiệu điều khiển.
3. Tối ưu hóa hiệu suất vòng lặp điều khiển
Việc tối ưu hóa hiệu suất vòng lặp điều khiển là một bước thiết yếu để đảm bảo sự ổn định, an toàn và hiệu quả của quy trình sản xuất. Tối ưu hóa thực hiện thông qua hai hoạt động chính: hiệu chỉnh (tuning) bộ điều khiển và phân tích hiệu suất. Hiệu chỉnh bộ điều khiển đề cập đến việc điều chỉnh các tham số của bộ điều khiển PID (Proportional, Integral, Derivative) để đạt được đáp ứng mong muốn.

Một bộ điều khiển được hiệu chỉnh kém có thể gây ra sự dao động quá mức, thời gian đáp ứng chậm, hoặc thậm chí là mất ổn định hệ thống. Một số phương pháp hiệu chỉnh phổ biến bao gồm phương pháp Ziegler-Nichols, phương pháp hiệu chỉnh tự động và hiệu chỉnh thủ công.
Mục tiêu của hiệu chỉnh là đạt được một phản ứng nhanh, ít bị quá độ và ít dao động nhất. Phân tích và giám sát hiệu suất đánh giá mức độ hiệu quả của vòng lặp. Nó sử dụng các chỉ số hiệu suất như:
- Độ sai lệch (Error): Mức độ biến được điều khiển sai lệch so với điểm đặt.
- Thời gian đáp ứng (Response Time): Thời gian cần thiết để vòng lặp đạt được điểm đặt.
- Độ ổn định (Stability): Khả năng của vòng lặp để duy trì trạng thái ổn định sau một thay đổi. Các công cụ phân tích hiệu suất trong DCS giúp các kỹ sư xác định các vòng lặp đang hoạt động kém hiệu quả và đưa ra các hành động cải thiện kịp thời.
4. Ứng dụng thực tiễn của Kỹ thuật điều khiển vòng lặp trong sản xuất công nghiệp
Các vòng lặp điều khiển là nền tảng của nhiều quy trình công nghiệp và được ứng dụng rộng rãi trong các ngành nghề đa dạng.
Ngành công nghiệp hóa dầu sử dụng vòng lặp điều khiển để kiểm soát áp suất, nhiệt độ, và lưu lượng trong các tháp chưng cất và lò phản ứng. Nó đảm bảo độ tinh khiết của sản phẩm và tối ưu hóa hiệu suất của nhà máy. Một ví dụ cụ thể là vòng lặp điều khiển nhiệt độ của một lò nung, sử dụng điều khiển tầng để duy trì nhiệt độ ổn định bằng cách điều chỉnh lưu lượng nhiên liệu.
Trong ngành sản xuất điện, vòng lặp điều khiển được sử dụng để điều khiển áp suất hơi, mức nước lò hơi, và nhiệt độ khí thải. Các vòng lặp này cần có độ chính xác cao để đảm bảo hiệu suất và an toàn của nhà máy điện. Một lỗi trong vòng lặp điều khiển có thể gây ra sự cố nghiêm trọng, ảnh hưởng đến toàn bộ mạng lưới điện.
Ngành thực phẩm và đồ uống áp dụng vòng lặp điều khiển để kiểm soát các thông số như nhiệt độ, độ pH, và tốc độ pha trộn. Nó đảm bảo chất lượng sản phẩm luôn ổn định và đáp ứng các tiêu chuẩn an toàn vệ sinh thực phẩm.
Cuối cùng, trong ngành dược phẩm, vòng lặp điều khiển đảm bảo các thông số môi trường sản xuất như nhiệt độ, độ ẩm, và áp suất được duy trì chính xác, đáp ứng các tiêu chuẩn GMP (Good Manufacturing Practices) nghiêm ngặt.
5. Các câu hỏi thường gặp (FAQs)
5.1. Phân biệt vòng lặp điều khiển hở và vòng lặp điều khiển kín?
Vòng lặp điều khiển hở không sử dụng phản hồi từ đầu ra để điều chỉnh đầu vào. Đầu ra của nó phụ thuộc hoàn toàn vào đầu vào. Ngược lại, vòng lặp điều khiển kín sử dụng một cơ chế phản hồi để đo lường đầu ra, so sánh nó với điểm đặt, và điều chỉnh đầu vào để duy trì trạng thái mong muốn. Vòng lặp kín có khả năng tự điều chỉnh và chống chịu tốt hơn với các nhiễu loạn.

5.2. Vai trò của bộ điều khiển PID trong DCS là gì?
Bộ điều khiển PID là loại bộ điều khiển phổ biến nhất trong DCS. Nó tính toán tín hiệu điều chỉnh dựa trên ba tham số:
- Tỷ lệ (Proportional): Phản ứng tỷ lệ thuận với sai số hiện tại.
- Tích phân (Integral): Loại bỏ sai số trong trạng thái ổn định bằng cách tích lũy sai số lịch sử.
- Vi phân (Derivative): Dự đoán sai số tương lai dựa trên tốc độ thay đổi của sai số, giúp tăng tốc độ phản ứng.
5.3. Làm thế nào để chọn loại vòng lặp điều khiển phù hợp?
Việc lựa chọn loại vòng lặp điều khiển phù hợp phụ thuộc vào đặc điểm của quy trình công nghiệp. Điều khiển vòng lặp đơn là đủ cho các quy trình đơn giản. Điều khiển tầng là lý tưởng cho các ứng dụng đòi hỏi sự ổn định cao và có nhiễu loạn cục bộ. Điều khiển vượt trước là tốt nhất cho các quy trình có nhiễu loạn đầu vào được xác định trước, giúp giảm thời gian đáp ứng của hệ thống.
6. Kết luận
Kỹ thuật điều khiển vòng lặp trong DCS đóng vai trò là “trái tim” của hệ thống. Nó thực thi nguyên lý điều khiển phản hồi để duy trì sự ổn định của quy trình sản xuất. Chúng ta đã khám phá các thành phần cốt lõi như bộ điều khiển PID, cảm biến, và bộ chấp hành. Bài viết cũng đã phân tích các kỹ thuật điều khiển nâng cao như điều khiển tầng và điều khiển tỷ lệ, khẳng định tính linh hoạt của DCS trong các ứng dụng đa dạng. Việc hiệu chỉnh và phân tích hiệu suất là những bước thiết yếu để đảm bảo vòng lặp hoạt động hiệu quả và đạt được các mục tiêu sản xuất.