
Động cơ servo
Nguyên lý hoạt động của động cơ servo DC: Chìa khóa điều khiển chính xác bằng PWM và Vòng kín
Động cơ servo DC đóng vai trò là nền tảng cơ bản và thiết yếu trong lĩnh vực sản xuất công nghiệp, khác biệt so với các hệ thống AC phức tạp hơn nhờ vào cấu trúc đơn giản và hiệu suất đáng tin cậy. Công nghệ này áp dụng nguyên tắc điện từ học trực tiếp để chuyển đổi năng lượng điện một chiều thành chuyển động quay chính xác, đảm bảo khả năng kiểm soát tuyệt vời đối với tốc độ, vị trí và mô-men xoắn.
Servo DC bao gồm hai loại chính: Động cơ servo chổi than truyền thống và Động cơ servo không chổi than (BLDC Servo) hiện đại, phục vụ nhiều ứng dụng từ các thiết bị di động nhỏ đến các trục robot công nghiệp. Bài viết này hướng đến việc giải thích cặn kẽ nguyên lý hoạt động của động cơ servo DC, tập trung vào cơ chế sinh mô-men xoắn và phương pháp Điều khiển PWM (Pulse Width Modulation) ưu việt.
1. Cơ sở Điện từ và Cấu tạo Động cơ Servo DC
Cấu tạo và nguyên lý điện từ là yếu tố cốt lõi quyết định cách động cơ servo DC chuyển hóa năng lượng điện thành chuyển động quay có kiểm soát. Cấu trúc cơ bản của động cơ bao gồm hai phần chính, tạo nên sự tương tác từ trường cần thiết để sinh ra lực quay.
1.1. Cấu tạo cơ bản của Động cơ DC
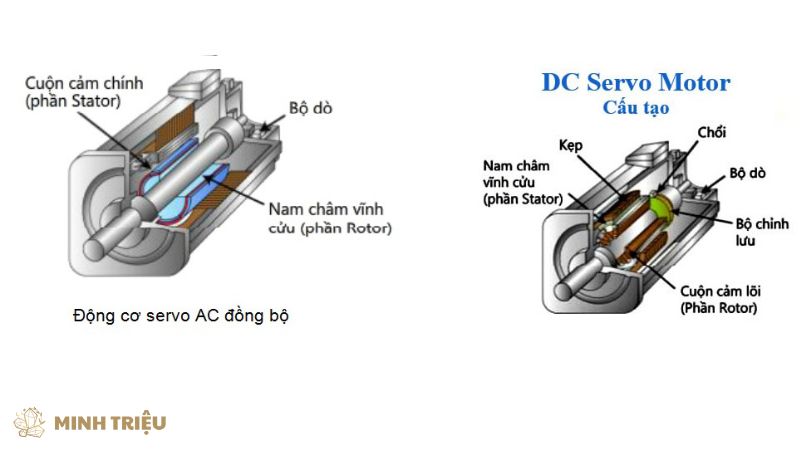
Cấu tạo cơ bản của Động cơ DC bao gồm Stator chứa nam châm vĩnh cửu và Rotor mang cuộn dây Phần ứng (Armature).
- Stator (Phần Tĩnh) chứa các nam châm vĩnh cửu mạnh mẽ, thực hiện chức năng tạo ra một từ trường tĩnh ổn định. Từ trường này đóng vai trò là nền tảng cơ sở để tương tác với từ trường sinh ra bởi dòng điện chạy trong Rotor.
- Rotor (Phần Quay) là nơi chứa các cuộn dây điện được gọi là Phần ứng (Armature), được quấn quanh một lõi sắt từ. Khi dòng điện DC được cấp vào Phần ứng, các cuộn dây này tạo ra một từ trường Rotor, dẫn đến sự tương tác đẩy và hút với từ trường Stator.
- Yếu tố phân biệt là cơ chế cấp dòng điện vào Rotor. Trong DC Servo, dòng điện DC phải được đảo chiều liên tục trong cuộn dây Phần ứng để duy trì mô-men xoắn quay liên tục. Cơ chế đảo chiều này phân loại động cơ thành loại Chổi than (cơ học) hoặc Không chổi than (điện tử).
1.2. Nguyên lý sinh Mô-men xoắn
Mô-men xoắn sinh ra theo Nguyên lý hoạt động servo DC là kết quả trực tiếp của định luật Lorentz, mô tả lực tác dụng lên dây dẫn mang dòng điện nằm trong từ trường.
- Định luật Lorentz mô tả rằng lực tác dụng lên mỗi cuộn dây của Phần ứng tỷ lệ thuận với cường độ dòng điện đi qua nó và cường độ từ trường tĩnh. Những lực này tạo ra một cặp mô-men xoắn, buộc Rotor phải quay.
- Mối quan hệ tuyến tính là ưu điểm nổi bật của DC Servo: Mô-men xoắn tỷ lệ thuận với Dòng điện ($\tau \propto I_a$). Điều này cho phép Hệ thống điều khiển vòng kín kiểm soát mô-men xoắn một cách tuyến tính và đơn giản bằng cách chỉ cần điều khiển dòng điện cấp.
- Tốc độ cũng tỷ lệ thuận với điện áp cấp. Việc kiểm soát mô-men xoắn và tốc độ được thực hiện độc lập và dễ dàng hơn nhiều so với động cơ AC, tạo điều kiện cho các thiết bị truyền động đơn giản hơn.
1.3. Phân biệt Cấu tạo theo Loại
Sự khác biệt cấu tạo là yếu tố cơ bản quyết định cơ chế đảo chiều dòng điện, dẫn đến sự phân loại rõ ràng giữa các loại DC Servo.
- Động cơ servo chổi than sử dụng một cơ chế cơ học, bao gồm Chổi than (Brush) tiếp xúc vật lý với Vành góp (Commutator), thực hiện việc đảo chiều dòng điện trong Phần ứng khi Rotor quay. Cấu trúc này dẫn đến sự mài mòn và giới hạn tuổi thọ hoạt động.
- Động cơ servo không chổi than (BLDC Servo) hoàn toàn loại bỏ Chổi than và Vành góp, sử dụng các cuộn dây trên Stator và nam châm vĩnh cửu trên Rotor. Việc đảo chiều dòng điện được thực hiện bằng điện tử thông qua một Driver (Biến tần) bên ngoài, dựa trên tín hiệu vị trí từ Cảm biến hồi tiếp.
| Đặc điểm so sánh | Động cơ servo chổi than | Động cơ servo không chổi than (BLDC Servo) |
|---|---|---|
| Cơ chế đảo chiều | Cơ học (Vành góp và Chổi than) | Điện tử (Driver và Cảm biến) |
| Cuộn dây (Phần ứng) | Trên Rotor (Phần quay) | Trên Stator (Phần tĩnh) |
| Ưu điểm nổi bật | Cấu trúc đơn giản, chi phí thấp | Tuổi thọ cao, ít bảo trì, hiệu suất cao |
| Hạn chế | Giới hạn tốc độ, mài mòn, phát sinh tia lửa | Cần Driver phức tạp, chi phí ban đầu cao hơn |
2. Nguyên lý hoạt động của Động cơ Servo DC Chổi than (Brushed DC Servo)
Động cơ servo chổi than vận hành dựa trên một cơ chế đảo chiều cơ học đơn giản, cho phép dòng điện DC được cấp liên tục vào cuộn dây Rotor để tạo ra mô-men xoắn quay liên tục. Cơ chế này phụ thuộc vào sự tương tác vật lý giữa hai thành phần chính.
2.1. Quá trình Đảo chiều Cơ học
Quá trình đảo chiều cơ học được thực hiện bởi sự kết hợp của Chổi than (Brush) và Vành góp, đảm bảo lực quay luôn tác động theo một hướng.
- Vành góp là một tập hợp các phân đoạn đồng được lắp đặt trên trục Rotor và cách điện với nhau. Vành góp đảm bảo dòng điện luôn được truyền vào các cuộn dây Phần ứng một cách tuần tự.
- Chổi than thực hiện nhiệm vụ tiếp xúc vật lý với Vành góp, dẫn dòng điện từ nguồn DC bên ngoài vào Phần ứng. Khi Rotor quay, Chổi thansẽ lần lượt chuyển tiếp dòng điện sang phân đoạn tiếp theo của Vành góp, thực hiện việc đảo chiều dòng điện trong cuộn dây.
- Hạn chế cố hữu là sự ma sát liên tục giữa Chổi than và Vành góp, gây ra sự hao mòn, sinh bụi carbon, và phát sinh tia lửa điện. Những yếu tố này giới hạn tuổi thọ và tốc độ tối đa của Động cơ servo chổi than trong các ứng dụng sản xuất công nghiệp tốc độ cao.
2.2. Điều khiển Tốc độ và Mô-men xoắn bằng PWM
Điều khiển PWM (Pulse Width Modulation) là phương pháp phổ biến và hiệu quả nhất được sử dụng để kiểm soát điện áp cung cấp cho Động cơ servo chổi than, quyết định tốc độ và mô-men xoắn đầu ra.
- PWM hoạt động trên nguyên lý thay đổi độ rộng của xung điện áp DC (Duty Cycle) trong khi giữ nguyên tần số. Độ rộng xung được đo bằng tỷ lệ thời gian Bật (ON) so với chu kỳ tổng.
- Nguyên lý điều khiển đơn giản: Khi độ rộng xung (Duty Cycle) tăng lên, điện áp trung bình (Average Voltage) cấp cho Phần ứng tăng theo. Theo mối quan hệ tuyến tính đã nêu, sự gia tăng điện áp này dẫn đến sự gia tăng tương ứng của tốc độ quay của động cơ.
- Kiểm soát mô-men xoắn được thực hiện gián tiếp thông qua PWM, vì điện áp cao hơn cho phép dòng điện lớn hơn chạy qua Phần ứng (tuân theo Định luật Ohm). Tỷ lệ Mô-men xoắn – Dòng điệnđảm bảo việc kiểm soát dòng điện là kiểm soát mô-men xoắn.
3. Nguyên lý hoạt động của Động cơ Servo DC Không chổi than (BLDC)
Động cơ servo không chổi than (BLDC Servo) vượt trội hơn loại chổi than nhờ vào cơ chế đảo chiều hoàn toàn bằng điện tử, loại bỏ ma sát và nâng cao đáng kể hiệu suất cùng độ bền trong sản xuất công nghiệp. Cơ chế này đòi hỏi sự phối hợp chặt chẽ giữa Driver và Cảm biến hồi tiếp.
3.1. Đảo chiều Điện tử (Electronic Commutation)
Đảo chiều điện tử là tính năng then chốt cho phép Động cơ servo không chổi than duy trì mô-men xoắn mà không cần tiếp xúc vật lý.
- Stator (Phần Tĩnh) chứa ba cuộn dây (pha), được cấp dòng điện tuần tự bởi Driver. Rotor chứa nam châm vĩnh cửu.
- Cảm biến hồi tiếp (Encoder hoặc Hall Sensor) là thành phần bắt buộc, cung cấp thông tin vị trí góc chính xác của Rotor cho Driver. Dữ liệu này cho phép Driver xác định chính xác cặp cuộn dây nào cần được cấp dòng điện và theo hướng nào để tạo ra lực đẩy/hút tối ưu.
- Driver sử dụng một cầu H (H-bridge) gồm các thiết bị chuyển mạch (thường là MOSFET hoặc IGBT) để điều phối dòng điện. Việc chuyển mạch này được gọi là đảo chiều điện tử, tạo ra từ trường quay đồng bộ với vị trí của nam châm Rotor. Nguyên lý hoạt động servo DC loại BLDC tối ưu hóa mô-men xoắn bằng cách đảm bảo từ trường Stator và Rotor vuông góc với nhau tại mọi thời điểm.
3.2. Hệ thống Điều khiển Vòng kín (Closed-Loop Control)
Hệ thống điều khiển vòng kín là kiến trúc kiểm soát bắt buộc đảm bảoĐộng cơ servo không chổi thanthực hiện lệnh đặt (vị trí/tốc độ) với độ chính xác cao nhất.
- Vòng lặp: Hệ thống điều khiển vòng kín hoạt động trên nguyên tắc So sánh, Tính toán, Điều chỉnh, Phản hồi. Vị trí/tốc độ đặt được so sánh với giá trị thực tế nhận được từ Cảm biến hồi tiếp (Encoder).
- Bộ điều khiển PID tiếp nhận sai số (Error) này và tính toán lệnh điều chỉnh (thường là lệnh dòng điện hoặc lệnh PWM) cần thiết để khắc phục sai lệch. Thuật toán PID đảm bảo sự ổn định, đáp ứng nhanh (P), loại bỏ sai số tĩnh (I), và giảm độ dao động (D).
- Cảm biến hồi tiếp (Encoder) cung cấp dữ liệu phản hồi với độ phân giải cực cao (thường là hàng ngàn hoặc hàng triệu xung/vòng), tạo điều kiện cho Hệ thống điều khiển vòng kín đạt được độ chính xác định vị chỉ trong vài micromet.
| Vòng Điều khiển | Mục tiêu chính | Phản hồi (Feedback) sử dụng | Lệnh đầu ra |
|---|---|---|---|
| Vòng Vị trí | Đạt vị trí đặt | Encoder | Lệnh Tốc độ |
| Vòng Tốc độ | Đạt tốc độ đặt | Encoder | Lệnh Dòng điện/Mô-men xoắn |
| Vòng Dòng điện | Đạt dòng điện đặt | Cảm biến dòng | Lệnh PWM/Điện áp |
4. Vai trò và Ứng dụng trong Sản xuất Công nghiệp
Ứng dụng động cơ servo DC cực kỳ rộng rãi và đa dạng, được ưu tiên lựa chọn nhờ vào các lợi thế kỹ thuật riêng biệt so với đối thủ AC Servo. Nguyên lý hoạt động servo DCmang lại sự đơn giản và hiệu quả cao, đặc biệt trong các ứng dụng có giới hạn về không gian hoặc nguồn điện.
4.1. Lợi thế kỹ thuật của Servo DC
Servo DC cung cấp các lợi thế kỹ thuật đặc thù làm cho chúng không thể thiếu trong nhiều phân khúc của sản xuất công nghiệp.
- Tính đơn giản: Động cơ servo chổi than có cấu tạo cơ khí đơn giản, giúp giảm chi phí sản xuất và điều khiển. Driver chỉ cần thực hiện Điều khiển PWM đơn giản thay vì thuật toán FOC phức tạp.
- Hiệu suất cao ở công suất thấp: Động cơ servo không chổi than (BLDC Servo) đạt được mật độ mô-men xoắn và hiệu suất vượt trội ở dải công suất thấp và trung bình, rất phù hợp cho các thiết bị chạy bằng pin hoặc cần độ chính xác cao mà không cần công suất quá lớn.
- Độ tin cậy và tuổi thọ cao: BLDC Servo loại bỏChổi than, giúp kéo dài tuổi thọ hoạt động và giảm thiểu nhu cầu bảo trì, tối ưu hóa thời gian hoạt động trong sản xuất công nghiệp.
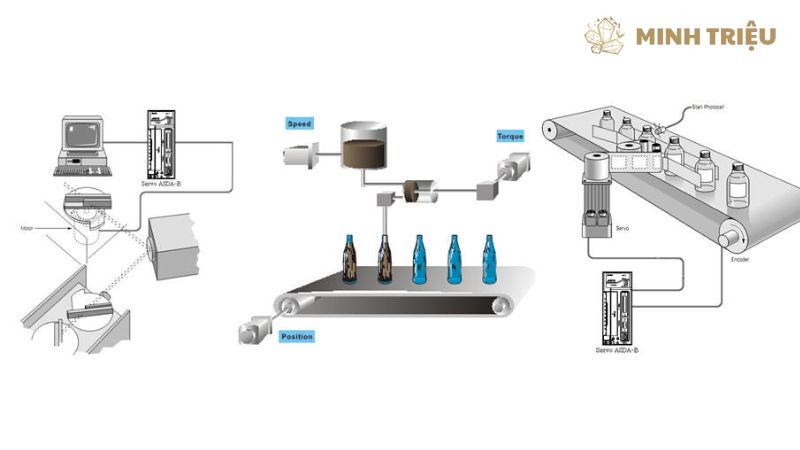
4.2. Ứng dụng trong Sản xuất Công nghiệp
Động cơ servo DC đảm nhận nhiều vai trò thiết yếu, giúp tự động hóa và nâng cao chất lượng trong nhiều ngành công nghiệp.
- Công nghiệp Robot và Thiết bị Y tế: Robot dịch vụ, tay gắp nhỏ, và các thiết bị hình ảnh y tế sử dụng BLDC Servo do yêu cầu kích thước nhỏ gọn, trọng lượng nhẹ, và khả năng điều khiển vị trí cực kỳ chính xác.
- Thiết bị Tự động hóa Văn phòng: Máy in 3D, máy CNC để bàn, và các cơ cấu định vị quang học sử dụng DC Servo vì chúng cung cấp mô-men xoắn cần thiết với độ ồn thấp và chi phí hợp lý.
- Ngành Hàng không và Thiết bị Không người lái: Các thiết bị truyền động trong máy bay không người lái (drone) và các cơ cấu điều khiển nhỏ đều yêu cầu BLDC Servo vì trọng lượng nhẹ và khả năng hoạt động hiệu quả từ nguồn điện một chiều (pin).
5. Kết luận
Nguyên lý hoạt động của động cơ servo DC là minh chứng cho thấy công nghệ đơn giản và tuyến tính vẫn giữ vai trò quan trọng tuyệt đối trong kỷ nguyên tự động hóa. Từ Động cơ servo chổi than với cơ chế đảo chiều cơ học đơn giản, đến Động cơ servo không chổi than tiên tiến sử dụng Điều khiển PWM và Hệ thống điều khiển vòng kín điện tử, cả hai loại đều đáp ứng nhu cầu kiểm soát chính xác trong sản xuất công nghiệp. Việc nắm vững vai trò của Phần ứng, Chổi than, và Cảm biến hồi tiếp giúp các kỹ sư lựa chọn giải pháp truyền động phù hợp nhất, khai thác tối đa lợi thế.