
Cảm biến (Sensor)
Cảm biến Quán Tính (Inertial sensors): Giải Pháp Đo Lường Chuyển Động Đột Phá

Trong các hệ thống tự động hóa hiện đại như robot, AGV hay cánh tay cơ khí, việc theo dõi chính xác chuyển động và vị trí là điều thiết yếu. Cảm biến quán tính (inertial sensors) mang lại giải pháp độc lập và ổn định, không phụ thuộc vào GPS hay tín hiệu bên ngoài. Thiết bị này giúp đo lường lực, gia tốc và định hướng của vật thể một cách chính xác trong thời gian thực. Bài viết sẽ giúp bạn hiểu rõ nguyên lý hoạt động, các loại cảm biến quán tính phổ biến và ứng dụng thực tế của công nghệ này trong sản xuất công nghiệp hiện đại.
1. Cảm biến quán tính là gì? Nguyên lý hoạt động cơ bản
Cảm biến quán tính là một thiết bị điện tử thực hiện chức năng đo lường và báo cáo các lực và chuyển động quán tính của một vật thể, bao gồm gia tốc, tốc độ góc và phương vị. Về bản chất, thiết bị này hoạt động dựa trên các nguyên lý vật lý cơ bản như định luật chuyển động của Newton và hiệu ứng Coriolis.
Nó theo dõi sự thay đổi trong trạng thái chuyển động của một vật thể, từ đó cung cấp dữ liệu về vận tốc, vị trí và định hướng của vật thể đó. Nguyên lý hoạt động chung của cảm biến quán tính dựa trên việc đo lường các lực quán tính tác động lên một khối lượng nhỏ (mass) bên trong cảm biến. Khi vật thể mang cảm biến di chuyển, khối lượng này sẽ phản ứng lại với các lực tác động, và sự dịch chuyển của nó sẽ được đo lường bằng các bộ chuyển đổi điện tử.
Cấu tạo cơ bản của một cảm biến quán tính thường bao gồm ba thành phần chính, mỗi thành phần đóng một vai trò thiết yếu trong quá trình đo lường chuyển động:
- Gia tốc kế (Accelerometer): Thành phần này thực hiện chức năng đo gia tốc thẳng của vật thể. Nó hoạt động dựa trên sự dịch chuyển của một khối lượng nhỏ (mass) được gắn trên một lò xo. Khi có gia tốc, khối lượng này sẽ dịch chuyển tương đối so với thân cảm biến, và sự dịch chuyển này sẽ được đo lường và chuyển đổi thành tín hiệu điện tử.
- Con quay hồi chuyển (Gyroscope): Thành phần này thực hiện chức năng đo tốc độ quay hoặc tốc độ góc của vật thể. Nó hoạt động dựa trên hiệu ứng Coriolis, nơi một khối lượng nhỏ được quay với tốc độ cố định sẽ chịu một lực khi có sự thay đổi về tốc độ góc của cảm biến, và lực này được đo lường.
- Từ kế (Magnetometer): Thành phần này thực hiện chức năng đo từ trường xung quanh để xác định hướng (phương vị) của vật thể so với từ trường Trái Đất. Dữ liệu từ từ kế giúp hiệu chỉnh và bổ sung cho dữ liệu từ gia tốc kế và con quay hồi chuyển, đặc biệt trong các ứng dụng điều hướng.
2. Phân loại và ứng dụng chi tiết của cảm biến quán tính
Cảm biến quán tính có nhiều loại, được phân loại dựa trên cách chúng kết hợp các thành phần cảm biến để cung cấp thông tin toàn diện về chuyển động của vật thể. Việc hiểu rõ sự khác biệt giữa các loại này giúp các kỹ sư lựa chọn thiết bị phù hợp nhất cho từng tác vụ.
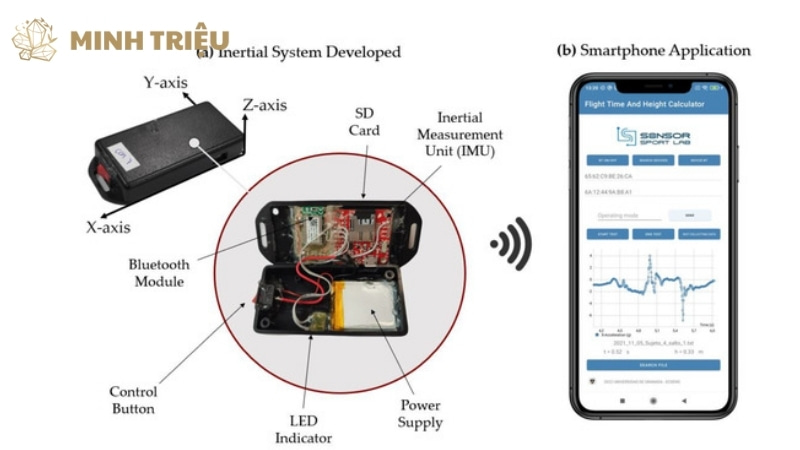
2.1. Bộ đo lường quán tính (IMU – Inertial Measurement Unit)
Bộ đo lường quán tính (IMU) là một thiết bị điện tử thực hiện chức năng kết hợp dữ liệu từ nhiều cảm biến quán tính khác nhau để cung cấp thông tin toàn diện về chuyển động. Một IMU điển hình là sự kết hợp của gia tốc kế, con quay hồi chuyển và đôi khi cả từ kế.
Nguyên lý: Dữ liệu từ các cảm biến thành phần được thu thập, sau đó một bộ vi xử lý thực hiện chức năng kết hợp và xử lý dữ liệu này bằng các thuật toán phức tạp (ví dụ: bộ lọc Kalman) để loại bỏ nhiễu và cung cấp thông tin chính xác về chuyển động 6 bậc tự do (3 bậc chuyển động thẳng và 3 bậc chuyển động quay).
Ưu điểm: Cung cấp thông tin đầy đủ, chính xác và theo thời gian thực về trạng thái chuyển động của vật thể.
Ứng dụng:
- Điều hướng cho robot tự hành (AGV) và drone: IMU cung cấp dữ liệu về vị trí, tốc độ và định hướng, giúp robot di chuyển tự động và tránh vật cản.
- Ổn định hình ảnh và camera trên các hệ thống quan sát: IMU thực hiện chức năng đo lường sự rung lắc và chuyển động không mong muốn, từ đó giúp hệ thống camera ổn định hình ảnh, tạo ra các video mượt mà.
- Kiểm soát chuyển động của cánh tay robot: IMU được gắn trên các khớp của cánh tay robot, cung cấp dữ liệu chính xác về góc quay và gia tốc, giúp cánh tay thực hiện các thao tác phức tạp một cách chính xác.
2.2. Gia tốc kế (Accelerometer)
Gia tốc kế là một loại cảm biến quán tính đơn giản hơn, thực hiện chức năng đo gia tốc tuyến tính của vật thể. Nó chỉ đo các thay đổi về vận tốc thẳng mà không đo tốc độ quay.
Nguyên lý: Dựa trên sự dịch chuyển của một khối lượng nhỏ (mass) bên trong cảm biến khi có gia tốc. Sự dịch chuyển này được chuyển đổi thành một tín hiệu điện áp hoặc dòng điện.
Đặc điểm: Chỉ đo gia tốc tuyến tính.
Ưu điểm: Nhỏ gọn, chi phí thấp, và có độ bền cao.
Ứng dụng:
- Phát hiện rung động bất thường của máy móc: Gia tốc kế được gắn trên các động cơ hoặc máy móc để đo lường độ rung. Nếu độ rung vượt quá một ngưỡng nhất định, nó sẽ đưa ra cảnh báo về khả năng hỏng hóc, giúp thực hiện bảo trì phòng ngừa.
- Giám sát va chạm, nghiêng của thiết bị: Gia tốc kế có thể phát hiện các va chạm đột ngột hoặc sự thay đổi về độ nghiêng của thiết bị, từ đó kích hoạt các cơ chế an toàn hoặc ghi lại sự kiện.
2.3. Con quay hồi chuyển (Gyroscope)
Con quay hồi chuyển là một loại cảm biến quán tính thực hiện chức năng đo tốc độ quay hoặc tốc độ góc của vật thể. Nó không đo gia tốc thẳng mà chỉ đo sự thay đổi về định hướng.
Nguyên lý: Dựa trên hiệu ứng Coriolis, nơi một khối lượng nhỏ bên trong cảm biến được kích thích dao động. Khi có sự thay đổi về tốc độ góc của cảm biến, lực Coriolis sẽ tác động lên khối lượng này, làm thay đổi hướng dao động. Sự thay đổi này được đo lường và chuyển đổi thành tín hiệu tốc độ góc.
Đặc điểm: Đo tốc độ quay.
Ưu điểm: Độ chính xác cao trong việc đo góc quay và tốc độ góc.
Ứng dụng:
- Ổn định hệ thống lái tự động: Trong các xe tự hành hoặc máy bay không người lái, con quay hồi chuyển cung cấp dữ liệu về tốc độ quay, giúp hệ thống điều khiển tự động điều chỉnh hướng để duy trì sự ổn định.
- Kiểm soát cân bằng của robot: Con quay hồi chuyển là một thành phần thiết yếu trong các robot cân bằng, cung cấp dữ liệu về góc nghiêng và tốc độ nghiêng, giúp robot duy trì thăng bằng.
- Định hướng các công cụ cầm tay thông minh: Con quay hồi chuyển giúp các công cụ như máy khoan tự động hoặc súng bắn keo duy trì một góc nghiêng chính xác, đảm bảo chất lượng công việc.
3. Ưu điểm và lợi ích khi sử dụng cảm biến quán tính
Việc tích hợp cảm biến quán tính vào quy trình sản xuất mang lại những lợi ích chiến lược và lâu dài cho doanh nghiệp, giúp nâng cao hiệu quả và tính an toàn.
- Độc lập với môi trường: Lợi thế lớn nhất của cảm biến quán tính là khả năng hoạt động độc lập. Nó không phụ thuộc vào tín hiệu GPS hoặc các cảm biến bên ngoài khác, cho phép nó hoạt động hiệu quả trong các môi trường khó khăn như trong nhà máy, dưới lòng đất, hoặc trong các khu vực có nhiều vật cản làm nhiễu tín hiệu.
- Độ chính xác cao: Cảm biến quán tính có khả năng đo lường các thay đổi chuyển động nhỏ nhất với độ chính xác cao. Khả năng này rất quan trọng trong các ứng dụng đòi hỏi sự kiểm soát chuyển động cực kỳ tinh vi, ví dụ như trong robot phẫu thuật hoặc các hệ thống điều khiển máy móc chính xác.
- Tốc độ phản ứng nhanh: Cảm biến quán tính cung cấp dữ liệu theo thời gian thực. Tốc độ phản ứng nhanh giúp các hệ thống điều khiển đưa ra quyết định kịp thời, từ đó nâng cao hiệu suất và tính an toàn của các hệ thống tự động hóa.
- Nhỏ gọn và chi phí hợp lý: Các cảm biến quán tính hiện đại được sản xuất bằng công nghệ MEMS (Micro-Electro-Mechanical Systems), giúp chúng trở nên rất nhỏ gọn, nhẹ và có chi phí sản xuất hợp lý. Kích thước nhỏ này cho phép chúng được tích hợp dễ dàng vào nhiều loại thiết bị khác nhau, từ các robot nhỏ đến các công cụ cầm tay.

4. Thách thức và hạn chế của cảm biến IMU
Trong quá trình phát triển, cảm biến quán tính mang lại nhiều ứng dụng vượt trội nhưng vẫn tồn tại không ít rào cản. Một số thách thức lớn cần được quan tâm:
- Sai số tích lũy theo thời gian (Drift): Một trong những vấn đề lớn nhất của hệ thống cảm biến quán tính (IMU) là hiện tượng sai số tích lũy. Khi thiết bị hoạt động trong thời gian dài mà không có nguồn tham chiếu bên ngoài, những sai lệch nhỏ trong đo lường sẽ tích tụ dần, dẫn đến kết quả định vị hoặc dẫn đường bị lệch đáng kể so với thực tế. Điều này đặc biệt nguy hiểm trong hàng không, tàu ngầm hay robot tự hành, nơi yêu cầu độ chính xác cao và liên tục.
- Chi phí sản xuất và hiệu chuẩn phức tạp: Các cảm biến quán tính có độ chính xác cao, đặc biệt là loại sử dụng trong hàng không vũ trụ và quân sự, đòi hỏi công nghệ chế tạo tiên tiến và quá trình hiệu chuẩn tỉ mỉ. Điều này khiến chi phí sản xuất tăng cao, khó phổ biến rộng rãi ở các thiết bị dân dụng giá rẻ. Ngoài ra, việc bảo trì và tái hiệu chuẩn định kỳ cũng tốn kém, làm hạn chế khả năng ứng dụng trong những lĩnh vực cần giá thành tối ưu.
- Nhu cầu kết hợp với công nghệ khác để tối ưu hiệu quả: Mặc dù IMU có thể hoạt động độc lập, nhưng để đạt độ chính xác cao và ổn định lâu dài, chúng thường phải kết hợp với các công nghệ khác như GPS, thị giác máy tính (Computer Vision) hoặc trí tuệ nhân tạo (AI). GPS giúp cung cấp điểm tham chiếu để giảm sai số, trong khi AI và thuật toán lọc (ví dụ Kalman Filter) giúp xử lý dữ liệu phức tạp và cải thiện độ tin cậy. Điều này cho thấy IMU không thể hoàn toàn thay thế các hệ thống định vị khác, mà chỉ đóng vai trò bổ trợ quan trọng trong giải pháp tích hợp.
5. Kết luận
Vai trò của cảm biến quán tính (inertial sensors) trong sản xuất công nghiệp là vô cùng quan trọng và không thể thiếu. Từ việc điều hướng cho robot tự hành đến việc kiểm soát chuyển động của cánh tay robot, những thiết bị nhỏ gọn này đã chứng minh được giá trị to lớn của chúng trong việc đo lường và theo dõi chuyển động một cách độc lập và chính xác.
Hiểu rõ cảm biến quán tính là gì và cách chúng hoạt động giúp các nhà quản lý và kỹ sư đưa ra những quyết định đúng đắn trong việc đầu tư công nghệ, xây dựng một môi trường sản xuất thông minh và hiệu quả hơn. Công nghệ này thực sự là một trong những công cụ cơ bản nhưng hiệu quả nhất của Sensor (Cảm biến) trong sản xuất công nghiệp, mở ra những tiềm năng không giới hạn cho sự đổi mới và phát triển.