
Robot công nghiệp
Lập trình Cobot: Giao diện Kéo Thả (Drag-and-drop) trong Sản xuất Công nghiệp
Sự phát triển của robot cộng tác (cobot) đã giúp tự động hóa trở nên linh hoạt và dễ tiếp cận hơn trong sản xuất. Tuy nhiên, lập trình phức tạp vẫn là rào cản lớn đối với nhiều doanh nghiệp. Lập trình kéo thả (drag-and-drop) ra đời như một bước đột phá, giúp đơn giản hóa quá trình điều khiển cobot mà không cần kỹ năng lập trình chuyên sâu. Bài viết sẽ phân tích khái niệm, lợi ích và cơ chế hoạt động của lập trình kéo thả, đồng thời làm rõ vai trò của nó trong việc thúc đẩy nhà máy thông minh và sản xuất linh hoạt trong tương lai.
1. Lập trình Kéo Thả là gì và Tại sao quan trọng cho Cobot?
Để hiểu được sức ảnh hưởng của nó, chúng ta cần tìm hiểu lập trình kéo thả là gì và tại sao nó lại đóng vai trò then chốt trong việc phổ biến cobot trong môi trường công nghiệp hiện đại.
1.1. Khái niệm Lập trình Kéo Thả (Drag-and-drop Programming)
Lập trình kéo thả là một phương pháp lập trình trực quan, cho phép người dùng xây dựng các chương trình bằng cách sắp xếp các khối lệnh đồ họa (visual blocks) thay vì viết các dòng mã phức tạp (code).
Giao diện người dùng thường là màn hình cảm ứng (HMI) tích hợp trực tiếp trên cánh tay cobot hoặc một phần mềm trên máy tính bảng/máy tính cá nhân, nơi người dùng có thể dễ dàng kéo các “khối” chức năng đã được định nghĩa trước từ một thư viện và thả chúng vào không gian làm việc theo trình tự mong muốn.
Mỗi khối lệnh này đại diện cho một hành động cụ thể của cobot như di chuyển đến một điểm, gắp vật phẩm, đặt vật phẩm, chờ một khoảng thời gian nhất định, hoặc điều khiển các thiết bị ngoại vi được kết nối.

1.2. Tầm quan trọng của Lập trình Kéo Thả đối với Cobot
Lập trình kéo thả mang lại tầm quan trọng chiến lược trong việc phổ biến và triển khai cobot. Nó đơn giản hóa việc triển khai, giúp các doanh nghiệp nhỏ và vừa (SMEs) dễ dàng tiếp cận tự động hóa mà không cần đầu tư vào đội ngũ kỹ sư lập trình chuyên sâu. Phương pháp này cũng giảm thiểu rào cản kỹ thuật, cho phép ngay cả những người vận hành trực tiếp tại nhà máy, những người không có kinh nghiệm về lập trình truyền thống, cũng có thể tự dạy và điều chỉnh cobot cho các tác vụ mới.
Nhờ sự trực quan này, nó tăng tốc độ cài đặt và thay đổi tác vụ, thúc đẩy sản xuất linh hoạt và cho phép doanh nghiệp dễ dàng thích nghi với việc sản xuất các lô sản phẩm nhỏ hoặc điều chỉnh quy trình nhanh chóng theo yêu cầu thị trường. Ngoài ra, giao diện trực quan và các khối lệnh được định nghĩa trước còn giảm thiểu lỗi lập trình do lỗi cú pháp hoặc logic, nâng cao độ tin cậy của hệ thống. Cuối cùng, lập trình kéo thả còn thúc đẩy cộng tác người-robot bằng cách cho phép người vận hành dễ dàng tương tác và điều chỉnh hành vi của cobot ngay tại dây chuyền sản xuất mà không cần can thiệp từ bên ngoài.
2. Cách thức hoạt động của Lập trình Kéo Thả trên Cobot
Vậy lập trình kéo thả hoạt động như thế nào để biến các ý tưởng thành hành động của cobot một cách trực quan và hiệu quả, tối ưu hóa quá trình tự động hóa?
2.1. Các bước cơ bản của quá trình lập trình
Quá trình lập trình cobot bằng phương pháp kéo thả thường bao gồm các bước cơ bản sau:
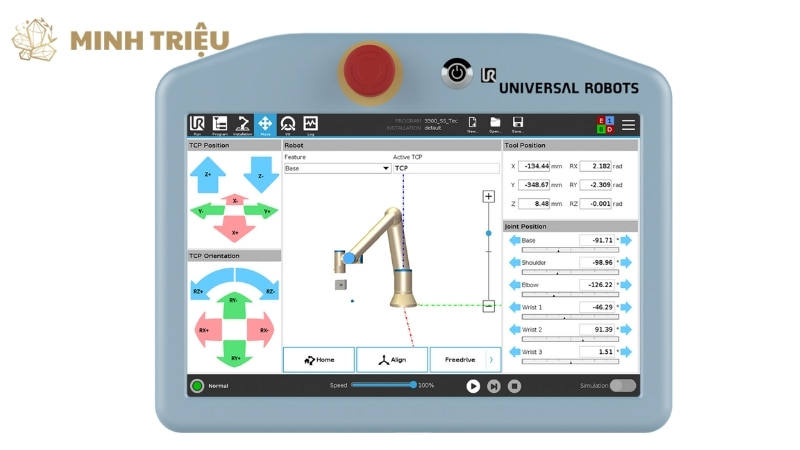
- Kết nối và Thiết lập: Bắt đầu bằng việc kết nối cobot với giao diện lập trình của nó, thường là một màn hình cảm ứng tích hợp trên cánh tay robot (teach pendant) hoặc một máy tính bảng chuyên dụng.
- Chọn và Kéo khối lệnh: Người dùng sẽ lựa chọn các khối lệnh cần thiết từ một thư viện được tổ chức khoa học và kéo chúng vào không gian làm việc theo trình tự logic mong muốn để xây dựng luồng chương trình.
- Cấu hình tham số: Mỗi khối lệnh sau khi được kéo vào sẽ yêu cầu cấu hình các tham số cụ thể. Ví dụ, với khối lệnh “Di chuyển đến điểm”, người dùng có thể nhập tọa độ điểm chính xác hoặc sử dụng lập trình bằng tay (Lead-through programming) để dạy điểm trực tiếp bằng cách vật lý di chuyển cánh tay cobot đến vị trí mong muốn và lưu lại. Tương tự, các khối lệnh khác có thể yêu cầu thiết lập tốc độ di chuyển, lực kẹp, thời gian chờ, v.v.
- Tạo luồng logic: Để tạo ra các chương trình phức tạp hơn, người dùng có thể sử dụng các khối lệnh điều kiện (ví dụ: “If-Else” để rẽ nhánh logic) và vòng lặp (ví dụ: “Loop” để lặp lại một chuỗi hành động nhiều lần) để định hình luồng logic của cobot.
- Chạy thử và Tối ưu hóa: Sau khi chương trình được xây dựng, người dùng sẽ chạy thử nghiệm để quan sát chuyển động của cobot và điều chỉnh nếu cần thiết nhằm đạt được hiệu suất tối ưu và đảm bảo an toàn.

2.2. Sự kết hợp với Lập trình Bằng tay (Lead-through Programming)
Lập trình bằng tay (Lead-through Programming), hay còn gọi là “Teaching by Demonstration,” là một phương pháp lập trình đặc trưng và phổ biến trên cobot, cho phép người dùng di chuyển vật lý cánh tay robot đến các vị trí mong muốn để lưu lại các điểm hoặc đường đi. Sự kết hợp giữa lập trình kéo thả và lập trình bằng tay tạo nên một quy trình lập trình hoàn hảo và hiệu quả.
Các điểm vị trí hoặc đường đi được dạy bằng tay có thể được lưu trữ trực tiếp và sau đó dễ dàng được sử dụng trong các khối lệnh kéo thả trên giao diện đồ họa. Sự kết hợp này mang lại nhiều lợi ích, bao gồm tăng cường tốc độ lập trình, dễ dàng điều chỉnh các đường đi phức tạp, và tận dụng tối đa khả năng trực quan của cả hai phương pháp, giúp người dùng linh hoạt hơn trong việc cài đặt và điều chỉnh cobot.
3. Các nền tảng Lập trình Kéo Thả phổ biến và Tính năng nâng cao
Các nhà sản xuất hàng đầu đã phát triển nhiều nền tảng lập trình kéo thả khác nhau, mỗi nền tảng mang đến những tính năng và ưu điểm riêng, phục vụ nhu cầu đa dạng trong sản xuất công nghiệp và tối ưu hóa trải nghiệm người dùng.
3.1. Các nền tảng và Giao diện tiêu biểu
Trên thị trường hiện nay có nhiều nền tảng lập trình kéo thả nổi bật:
- Universal Robots (UR+ Polyscope): Polyscope là một trong những giao diện kéo thả tiên phong và phổ biến nhất, nổi tiếng với sự thân thiện, trực quan và thư viện khối lệnh phong phú, dễ dàng tích hợp các thiết bị của bên thứ ba thông qua hệ sinh thái UR+.
- Fanuc (CRX Series – DR-C Controller): Fanuc đã phát triển giao diện lập trình trực quan cho dòng cobot CRX của mình, tập trung vào sự đơn giản và dễ sử dụng để giảm bớt rào cản cho người mới bắt đầu.
- ABB (Wizard Easy Programming): ABB cung cấp giao diện Wizard Easy Programming, được thiết kế đặc biệt để đơn giản hóa việc lập trình cobot YuMi, giúp người dùng dễ dàng tạo các chương trình phức tạp thông qua giao diện đồ họa.
- Doosan Robotics (Teach Pendant): Doosan Robotics cũng chú trọng vào trải nghiệm người dùng, cung cấp giao diện thân thiện trên Teach Pendant của họ, cho phép lập trình trực quan bằng cách kéo thả và điều chỉnh các tham số.
3.2. Các Tính năng nâng cao hỗ trợ Kéo Thả
Các nền tảng lập trình kéo thả ngày càng tích hợp nhiều tính năng nâng cao để mở rộng khả năng của cobot:
- Tích hợp cảm biến: Cho phép người dùng kéo thả các khối lệnh liên quan đến việc đọc dữ liệu từ cảm biến lực, hệ thống thị giác máy tính, và cảm biến khoảng cách. Điều này giúp cobot phản ứng thông minh với môi trường, ví dụ như điều chỉnh lực kẹp dựa trên phản hồi lực hoặc nhận diện vật phẩm bằng thị giác.
- Logic điều kiện và vòng lặp: Cung cấp các khối lệnh cho phép tạo ra logic phức tạp hơn, ví dụ như “Nếu phát hiện vật A, thì gắp; nếu phát hiện vật B, thì bỏ qua” hoặc “Lặp lại chuỗi hành động này 10 lần”.
- Tương tác với thiết bị ngoại vi: Bao gồm các khối lệnh để điều khiển các công cụ cuối cánh tay (end-effectors) như kẹp, giác hút, hoặc để giao tiếp với các thiết bị khác trên dây chuyền sản xuất như băng tải, máy CNC, hay PLC.
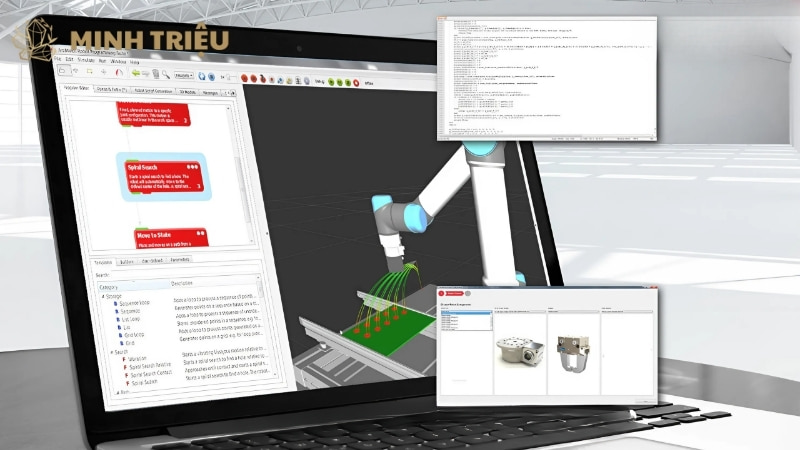
- Mô phỏng 3D: Một số nền tảng hiện đại tích hợp khả năng mô phỏng chương trình trong môi trường ảo 3D trước khi triển khai thực tế, giúp kiểm tra và tối ưu hóa chương trình mà không ảnh hưởng đến sản xuất.
- Quản lý lỗi và Gỡ lỗi: Cung cấp các công cụ trực quan giúp xác định và khắc phục lỗi trong chương trình một cách dễ dàng, giảm thời gian chết.
4. Tác động của Lập trình Kéo Thả đến Sản xuất và Triển vọng
Lập trình kéo thả không chỉ đơn giản hóa quá trình vận hành mà còn mang lại tác động sâu rộng đến sản xuất công nghiệp và định hình triển vọng tương lai của tự động hóa, thúc đẩy sự chuyển đổi mạnh mẽ.
4.1. Tác động đến Sản xuất Công nghiệp
Lập trình kéo thả đang dân chủ hóa tự động hóa, mở rộng khả năng tiếp cận robot cho các doanh nghiệp vừa và nhỏ (SMEs) mà trước đây gặp khó khăn về chi phí và nguồn lực lập trình. Nó cũng nâng cao sản xuất linh hoạt đáng kể bằng cách giảm thời gian thiết lập lại (re-tooling) cho các lô sản phẩm nhỏ hoặc thay đổi quy trình, thúc đẩy mạnh mẽ xu hướng sản xuất cá nhân hóa.
Phương pháp này còn giảm chi phí triển khai đáng kể do tiết kiệm chi phí thuê lập trình viên chuyên nghiệp và rút ngắn thời gian tích hợp hệ thống. Điều này dẫn đến cải thiện hiệu quả vận hành tổng thể, giảm thiểu lỗi và tối ưu hóa năng suất. Cuối cùng, nó đơn giản hóa việc đào tạo và phát triển nguồn nhân lực, giúp nhân viên hiện có dễ dàng chuyển đổi sang vai trò giám sát và vận hành cobot, lấp đầy khoảng cách kỹ năng trong ngành.

4.2. Triển vọng tương lai của Lập trình Cobot
Trong tương lai, lập trình cobot sẽ tiếp tục phát triển theo hướng thông minh và trực quan hơn nữa. Một trong những triển vọng lớn là tích hợp AI và Học máy (Machine Learning) sâu hơn vào các giao diện kéo thả, cho phép cobot “học” từ các ví dụ thực tế hoặc từ dữ liệu môi trường để tự động tạo ra các khối lệnh và chuỗi hành động phức tạp.
Các phương pháp lập trình bằng giọng nói/cử chỉ cũng đang được nghiên cứu và phát triển, hứa hẹn giảm bớt sự phụ thuộc vào màn hình điều khiển. Cobot sẽ có khả năng cá nhân hóa và thích ứng cao hơn, tự động điều chỉnh chương trình dựa trên dữ liệu thời gian thực từ các cảm biến và nhu cầu sản xuất thay đổi.
Cuối cùng, lập trình kéo thả là một phần quan trọng của hệ sinh thái robot thông minh, cho phép tích hợp liền mạch với các hệ thống Industrial IoT (IIoT) và góp phần xây dựng một nhà máy thông minh hoàn chỉnh, nơi mọi thiết bị đều được kết nối và hoạt động đồng bộ.
5. Kết luận
Lập trình kéo thả (drag-and-drop) đã thực sự cách mạng hóa việc triển khai robot cộng tác (cobot) trong sản xuất công nghiệp, biến công việc lập trình phức tạp thành một quá trình trực quan và dễ tiếp cận cho nhiều đối tượng người dùng. Với giao diện thân thiện, khả năng kết hợp linh hoạt với lập trình bằng tay và sự hỗ trợ từ các nền tảng tiên tiến, lập trình kéo thả giúp các doanh nghiệp dễ dàng hơn trong việc tận dụng lợi ích của tự động hóa mà không cần chuyên môn sâu về lập trình.
Việc áp dụng phương pháp lập trình này không chỉ giảm thiểu rào cản kỹ thuật và giảm chi phí triển khai, mà còn thúc đẩy mạnh mẽ sản xuất linh hoạt và sản xuất cá nhân hóa, là bước đi quan trọng hướng tới việc xây dựng một nhà máy thông minh hiệu quả và cạnh tranh.