
Thiết bị chấp hành (Actuator)
Cảm biến vị trí trong Actuator điện: Chìa khóa vàng cho Tự động hóa công nghiệp
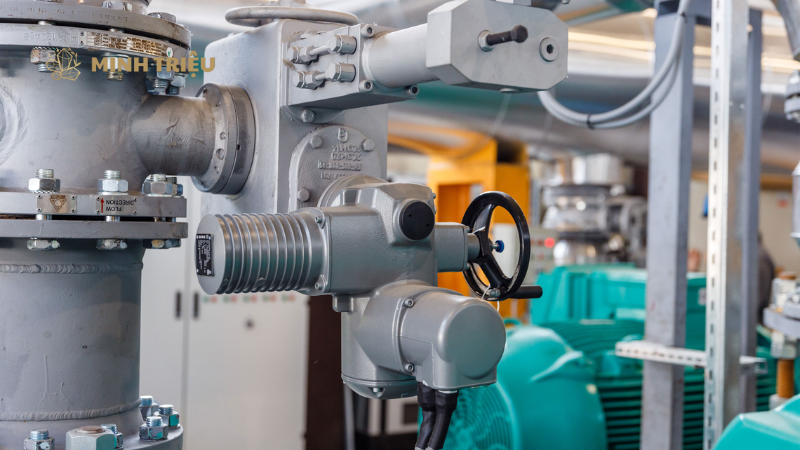
Thiết bị chấp hành (Actuator) đóng vai trò là cầu nối vật lý quan trọng, chuyển đổi tín hiệu điều khiển điện tử thành hành động cơ học trong mọi hệ thống tự động hóa. Trong bối cảnh Tự động hóa công nghiệp đang bùng nổ, Actuator điện nổi lên như một giải pháp ưu việt, mang lại khả năng điều khiển chính xác, hiệu suất năng lượng cao, và dễ dàng tích hợp vào mạng lưới IoT. Sự trỗi dậy mạnh mẽ của Actuator điện đã thay thế dần các hệ thống thủy lực và khí nén truyền thống, nhờ khả năng vận hành sạch sẽ hơn, ít cần bảo trì hơn, và đặc biệt là khả năng cung cấp Phản hồi vị trí chính xác gần như tuyệt đối.
1. Nguyên lý Điều khiển Actuator điện: Vòng lặp kín
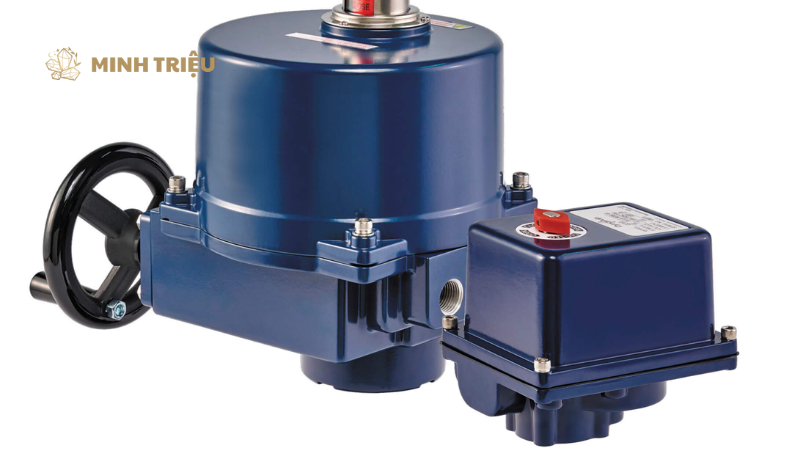
1.1. Cấu tạo cơ bản của một Actuator điện
Một Actuator điện điển hình bao gồm ba thành phần cơ bản hợp lực để thực hiện hành động chấp hành. Đầu tiên, Mô tơ (Motor) cung cấp nguồn năng lượng cơ học, thường là dưới dạng chuyển động quay. Tiếp theo, Bộ truyền động cơ khí (như Gearbox hoặc Lead Screw) có nhiệm vụ chuyển đổi và khuếch đại lực, biến chuyển động quay của mô tơ thành chuyển động tuyến tính (hoặc quay) với mô-men xoắn và tốc độ phù hợp với yêu cầu tải. Cuối cùng, Cảm biến vị trí trong Actuator điện đóng vai trò là thành phần cốt lõi, cung cấp dữ liệu về trạng thái thực tế của Actuator.

1.2. Cơ chế Điều khiển Vòng lặp kín (Closed-loop Control)
Hệ thống này hoạt động dựa trên sự so sánh liên tục giữa lệnh điều khiển (vị trí mong muốn) và dữ liệu Phản hồi vị trí nhận được từ cảm biến. Quá trình bắt đầu khi Bộ điều khiển (Controller) nhận một lệnh vị trí, sau đó nó tính toán Sai số (Error) bằng cách áp dụng công thức cơ bản:$$\text{Sai số} = \text{Vị trí mong muốn} – \text{Vị trí hiện tại (Từ cảm biến)}$$
Bộ điều khiển sử dụng sai số này để hiệu chỉnh và điều chỉnh nguồn điện cung cấp cho mô tơ, đảm bảo Actuator di chuyển theo hướng chính xác và dừng lại ở điểm đã định. Cơ chế này khác biệt hoàn toàn so với điều khiển vòng hở, vốn chỉ gửi lệnh mà không nhận lại xác nhận về kết quả thực tế.
1.3. Phản hồi vị trí: Yếu tố Quyết định Chất lượng Actuator
Phản hồi vị trí cung cấp thông tin quan trọng nhất để Bộ điều khiển đánh giá hiệu suất của Actuator, qua đó ảnh hưởng trực tiếp đến chất lượng và độ tin cậy của toàn bộ hệ thống. Dữ liệu Phản hồi vị trí chất lượng cao cho phép hệ thống phản ứng nhanh chóng với các thay đổi tải hoặc nhiễu động từ môi trường bên ngoài. Vì lý do này, việc lựa chọn loại Cảm biến vị trí trong Actuator điện phù hợp trở thành quyết định kỹ thuật then chốt, đảm bảo hệ thống tự động hóa vận hành trơn tru và đạt hiệu quả tối đa.
2. Vai trò và Tác động của Cảm biến vị trí
2.1. Đảm bảo Độ chính xác (Accuracy) và Độ lặp lại (Repeatability)
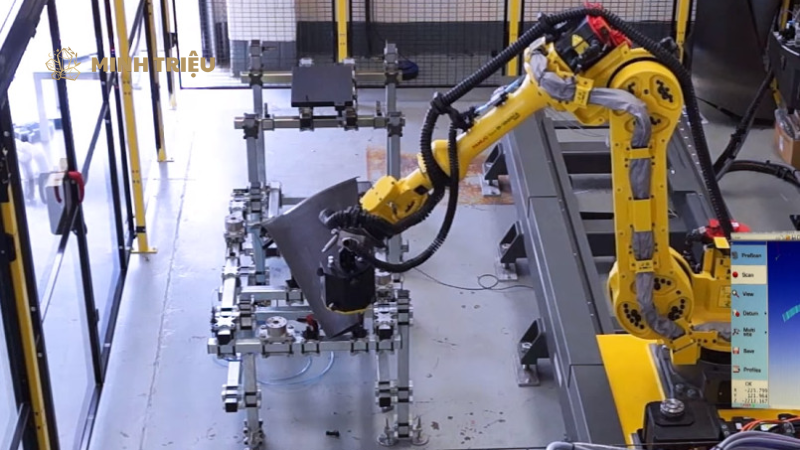
Cảm biến vị trí trong Actuator điện là nhân tố đảm bảo Độ chính xác bằng cách liên tục cung cấp dữ liệu tức thì cho Bộ điều khiển để hiệu chỉnh các dao động nhỏ nhất. Độ chính xác được định nghĩa là khả năng đạt đến một vị trí mục tiêu đã được lập trình trước. Ngược lại, Độ lặp lại (Repeatability) mô tả khả năng Actuator quay lại cùng một vị trí nhiều lần liên tiếp dưới các điều kiện hoạt động giống nhau. Tầm quan trọng của những yếu tố này thể hiện rõ ràng trong các ứng dụng robot và thiết bị gắp nhả (Pick-and-Place), nơi các chuyển động lặp đi lặp lại phải được thực hiện với dung sai rất nhỏ.
2.2. Chức năng An toàn và Bảo vệ
Cảm biến vị trí đóng vai trò thiết yếu trong việc thiết lập các chức năng An toàn, ngăn chặn hỏng hóc cơ khí và bảo vệ tài sản. Việc giám sát hành trình giúp Actuator tránh được các va chạm cơ khí bằng cách xác định điểm cuối an toàn (thường được hỗ trợ bởi Limit Switches phụ trợ). Hơn nữa, dữ liệu vị trí cũng được sử dụng để Phát hiện quá tải hoặc lỗi kẹt (Stall Detection). Nếu Bộ điều khiển gửi lệnh di chuyển nhưng Phản hồi vị trí không thay đổi sau một khoảng thời gian nhất định, hệ thống sẽ kích hoạt cơ chế ngắt khẩn cấp để bảo vệ mô tơ và bộ truyền động.
2.3. Hỗ trợ Điều khiển Tốc độ và Gia tốc (Ramp Up/Down)
Bộ điều khiển sử dụng dữ liệu cảm biến vị trí để tính toán vận tốc của Actuator, một thông số cần thiết để điều khiển chuyển động mượt mà. Việc điều khiển Tốc độ và Gia tốc (Ramp Up/Down) đảm bảo Actuator khởi động và dừng lại một cách êm ái, giảm thiểu độ rung và sốc cơ học. Bộ điều khiển sẽ điều chỉnh nguồn điện đầu vào mô tơ dựa trên tốc độ tính toán, giúp tối ưu hóa thời gian chu kỳ và kéo dài tuổi thọ của các thành phần cơ khí.
3. Các Loại Cảm biến vị trí phổ biến trong Actuator
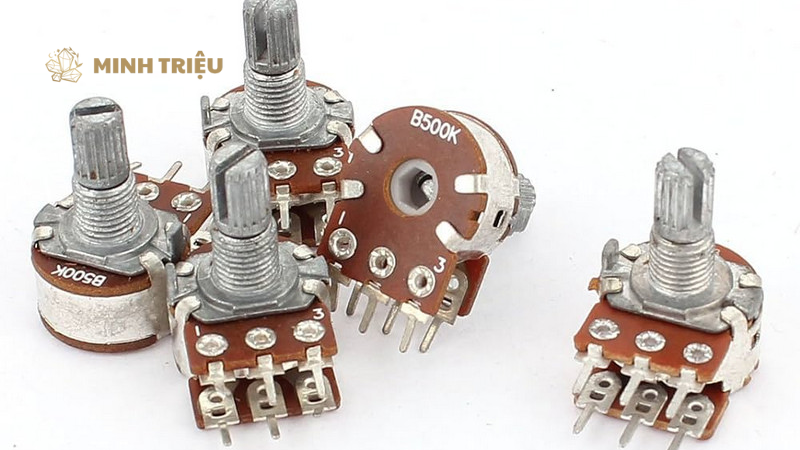
3.1. Chiết áp (Potentiometer) – Phản hồi Analog
Chiết áp Actuator hoạt động dựa trên nguyên lý đo sự thay đổi của điện trở khi thanh trượt hoặc trục quay của Actuator di chuyển dọc theo một dải điện trở. Đây là một trong những loại cảm biến lâu đời và phổ biến nhất, cung cấp tín hiệu đầu ra dạng analog (thường là 0-10V hoặc 4-20mA), dễ dàng tích hợp vào các hệ thống điều khiển cơ bản. Mặc dù có ưu điểm vượt trội về giá thành thấp và tính đơn giản, Chiết áp Actuator có nhược điểm lớn là dễ bị mòn cơ học do sự tiếp xúc liên tục giữa thanh trượt và dải điện trở, làm giảm tuổi thọ và độ tin cậy trong các ứng dụng chu kỳ cao.
3.2. Bộ Mã hóa quang học (Encoder) – Phản hồi Digital
Thiết bị này hoạt động bằng cách sử dụng một đĩa mã hóa có các khe hở và một cảm biến quang để tạo ra các xung điện (pulse) khi đĩa quay. Tín hiệu đầu ra là dạng kỹ thuật số, mang lại khả năng chống nhiễu vượt trội so với tín hiệu analog.
- Encoder Tăng dần (Incremental Encoder): Loại này cung cấp tín hiệu tốc độ và vị trí tương đối dựa trên số lượng xung được tạo ra từ một điểm khởi đầu. Actuator sử dụng loại này cần thực hiện thao tác tham chiếu (homing) khi khởi động để xác định vị trí “zero” ban đầu.
- Encoder Tuyệt đối (Absolute Encoder): Loại này cung cấp vị trí tuyệt đối (absolute position) ngay lập tức sau khi khởi động, nhờ vào một hệ thống mã hóa phức tạp hơn. Encoder Tuyệt đối được ưu tiên trong các ứng dụng quan trọng đòi hỏi độ chính xác và độ tin cậy cực cao, không bị mất vị trí khi mất điện.
3.3. Cảm biến Hiệu ứng Hall (Hall Effect Sensor) – Phổ biến trong Actuator Tuyến tính
Cảm biến Hiệu ứng Hall hoạt động dựa trên việc đo sự thay đổi cường độ từ trường khi một nam châm được gắn vào Actuator chuyển động.
Ưu điểm lớn nhất của công nghệ này là nguyên tắc hoạt động không tiếp xúc (Non-contact), loại bỏ hoàn toàn vấn đề mòn cơ học. Điều này tăng đáng kể tuổi thọ của cảm biến Actuator và cho phép nó hoạt động tốt trong các môi trường bụi bẩn, ẩm ướt, nơi các cảm biến quang học hoặc chiết áp dễ bị hỏng.
3.4. Cảm biến Điện từ (LVDT/RVDT)
Cảm biến Điện từ, bao gồm LVDT (Linear Variable Differential Transformer) và RVDT (Rotary Variable Differential Transformer), sử dụng nguyên lý cảm ứng điện từ để đo sự thay đổi độ tự cảm khi lõi sắt di chuyển bên trong cuộn dây. Công nghệ LVDT nổi tiếng với khả năng đạt Độ phân giải cực cao và độ tuyến tính tuyệt vời. Giống như cảm biến Hall, LVDT/RVDT cũng là thiết bị không tiếp xúc, làm tăng thêm độ bền bỉ và độ tin cậy trong các môi trường công nghiệp khắc nghiệt.
Bảng 1: So sánh ưu nhược điểm của các Công nghệ Cảm biến Vị trí
| Công nghệ Cảm biến | Ưu điểm nổi bật | Nhược điểm chính | Ứng dụng tiêu biểu |
|---|---|---|---|
| Chiết áp Actuator | Chi phí thấp, lắp đặt đơn giản, tín hiệu analog trực tiếp. | Mòn cơ học, độ bền thấp trong chu kỳ cao, dễ bị nhiễu. | Điều khiển van đơn giản, ứng dụng chi phí thấp. |
| Encoder quang học | Độ chính xác và độ phân giải cao, tín hiệu Digital chống nhiễu tốt. | Cần môi trường sạch (dễ bị bụi bẩn), giá thành cao hơn chiết áp. | Robot, máy CNC, hệ thống yêu cầu Điều khiển vòng kín phức tạp. |
| Cảm biến Hiệu ứng Hall | Không tiếp xúc, tuổi thọ cao, chống bụi bẩn, phù hợp cho Actuator tuyến tính. | Độ tuyến tính và độ phân giải thấp hơn LVDT/Encoder tuyệt đối. | Actuator trong xe cộ, thiết bị ngoài trời. |
| LVDT/RVDT | Độ phân giải và độ lặp lại cực cao, không tiếp xúc, bền bỉ. | Chi phí rất cao, kích thước lớn hơn, cần mạch xử lý phức tạp. | Kiểm tra chất lượng, phòng thí nghiệm, công nghiệp hàng không. |
4. Tiêu chí Lựa chọn Cảm biến phù hợp
4.1. Yêu cầu về Độ phân giải và Độ chính xác (Resolution & Accuracy)
Độ phân giải xác định mức độ chi tiết mà cảm biến có thể đo lường sự thay đổi vị trí. Ứng dụng yêu cầu độ chính xác micromet (như trong sản xuất bán dẫn hoặc robot phẫu thuật) sẽ bắt buộc phải sử dụng Absolute Encoder hoặc LVDT có độ phân giải cao. Ngược lại, đối với các ứng dụng ít khắt khe hơn (như điều khiển van thô), Chiết áp Actuator có thể cung cấp độ chính xác vừa đủ.
4.2. Môi trường hoạt động
Môi trường hoạt động ảnh hưởng trực tiếp đến tuổi thọ và độ tin cậy của cảm biến Actuator. Các Actuator hoạt động trong điều kiện khắc nghiệt cần ưu tiên các giải pháp không tiếp xúc.
- Nhiệt độ cao: Cảm biến Hall và LVDT thường chịu nhiệt tốt hơn các loại Encoder có linh kiện quang học và điện tử nhạy cảm.
- Rung động và Sốc: Cảm biến không có bộ phận chuyển động (Hall, LVDT) có độ bền cơ học cao hơn.
- Bụi bẩn và Hóa chất: Cảm biến Hiệu ứng Hall hoặc Encoder quang học được đóng kín (sealing) là lựa chọn tối ưu vì chúng ít bị ảnh hưởng bởi tạp chất.
4.3. Loại tín hiệu đầu ra
Loại tín hiệu đầu ra quyết định cách Actuator được tích hợp vào hệ thống điều khiển tổng thể. Tín hiệu đầu ra phải tương thích với Bộ điều khiển (PLC, DCS) đang được sử dụng.
Bảng 2: Các Loại Tín hiệu Đầu ra Phổ biến của Cảm biến Vị trí
| Loại Tín hiệu | Định dạng | Ưu điểm | Ứng dụng phù hợp |
|---|---|---|---|
| Analog | 4-20mA, 0-10V | Dễ dàng tương thích với PLC cũ, truyền xa tốt hơn 0-10V. | Điều khiển tốc độ, lực, và vị trí đơn giản. |
| Digital (Incremental) | A/B/Z Pulse | Tốc độ phản hồi cao, chống nhiễu tốt. | Đo tốc độ mô tơ, điều khiển vị trí tương đối. |
| Digital (Absolute) | SSI, BISS | Cung cấp vị trí chính xác ngay lập tức (không cần homing). | Robot công nghiệp, máy công cụ CNC. |
| Fieldbus | Profibus, Modbus, Ethernet/IP | Truyền dữ liệu đa chiều, chẩn đoán và cấu hình từ xa. | Hệ thống Tự động hóa công nghiệp phức tạp, Smart Actuator. |
4.4. Chi phí và Yêu cầu bảo trì
Chi phí thường tỷ lệ thuận với độ phức tạp và độ chính xác của cảm biến. Việc đầu tư vào một Encoder tuyệt đối có thể có chi phí ban đầu cao, nhưng lại tiết kiệm chi phí bảo trì và giảm thiểu thời gian chết (downtime) về lâu dài. Chiết áp Actuator có chi phí thấp nhất, nhưng yêu cầu thay thế thường xuyên hơn trong các ứng dụng có chu kỳ hoạt động cao.
5. Ứng dụng Thực tiễn
5.1. Điều khiển Van Công nghiệp (Van Tiết lưu, Van Bi)
Actuator điện được sử dụng rộng rãi để Điều khiển Van công nghiệp, đặc biệt là trong các quy trình hóa chất, dầu khí và nước. Phản hồi vị trí từ cảm biến đảm bảo van mở/đóng chính xác theo phần trăm yêu cầu (ví dụ: mở 30% để điều chỉnh lưu lượng). Độ chính xác này là cực kỳ quan trọng đối với các van tiết lưu (throttling valve), nơi việc điều chỉnh nhỏ nhất cũng ảnh hưởng đến chất lượng sản phẩm cuối cùng.
5.2. Robot và Thiết bị Gắp Nhả (Pick-and-Place)
Trong lĩnh vực robot, các Actuator điện cần sự hỗ trợ của Encoder quang học tuyệt đối để đạt được Độ lặp lại và tốc độ cao. Cảm biến vị trí giúp cánh tay robot biết chính xác vị trí góc của từng khớp, cho phép nó định vị và gắp nhả các vật thể nhỏ một cách nhanh chóng và chính xác. Sự kết hợp giữa Encoder quang học và Điều khiển vòng kín là điều kiện bắt buộc để robot hoạt động an toàn và hiệu quả.
5.3. Dây chuyền Đóng gói và Phân loại
Actuator điện được sử dụng để định vị sản phẩm chính xác trên băng tải hoặc để điều chỉnh kích thước đóng gói. Trong các dây chuyền tốc độ cao, Phản hồi vị trí đảm bảo rằng mọi hành động (như dán nhãn, cắt, đẩy) đều được thực hiện ở đúng khoảnh khắc và vị trí, tối ưu hóa thông lượng và giảm thiểu lãng phí vật liệu.
6. Kết luận
Tóm lại, Cảm biến vị trí trong Actuator điện là thành phần không thể thiếu để chuyển Actuator từ một thiết bị cơ khí đơn giản thành một thiết bị chấp hành thông minh. Chúng cung cấp khả năng Điều khiển vòng kín, đảm bảo độ chính xác, độ lặp lại và an toàn, qua đó đáp ứng các tiêu chuẩn khắt khe nhất của Tự động hóa công nghiệp hiện đại. Việc lựa chọn công nghệ cảm biến (dù là Encoder quang học, Chiết áp Actuator, hay Hall Effect) phải dựa trên sự phân tích toàn diện về ứng dụng và môi trường.