
Động cơ servo
Khắc phục Sự cố Ban đầu (Troubleshooting) Động cơ Servo: Hướng dẫn Toàn diện cho Kỹ thuật viên Sản xuất

Động cơ servo là thành phần cốt lõi của hệ thống truyền động hiện đại. Công nghệ servo đảm bảo tự động hóa chính xác trong các ngành công nghiệp như CNC, robot, và dây chuyền đóng gói tốc độ cao. Sự cố bất ngờ xảy ra; việc xác định và xử lý lỗi nhanh chóng là trách nhiệm hàng đầu của kỹ thuật viên. Một lỗi nhỏ trong vòng lặp điều khiển servo có thể dẫn đến thời gian chết (Downtime) kéo dài. Việc tối ưu hóa quy trình khắc phục sự cố ban đầu giúp khôi phục hoạt động sản xuất tức thì.
1. Chuẩn bị trước khi khắc phục sự cố (Pre-Troubleshooting Checklist)
1.1. Đảm bảo An toàn Lao động (Safety First)
An toàn lao động luôn là ưu tiên tuyệt đối trước mọi thao tác kiểm tra điện. Kỹ thuật viên phải thực hiện quy trình Ngắt nguồn và Khóa/Thẻ (Lockout/Tagout – LOTO). Quy trình LOTO đảm bảo nguồn điện được cô lập hoàn toàn khỏi hệ thống. Sau khi ngắt nguồn, người bảo trì cần kiểm tra điện áp dư (Residual Voltage) trên bus DC của Driver Servo. Điện áp dư trong tụ điện của bộ truyền động có thể gây thương tích nghiêm trọng. Việc tuân thủ an toàn nghiêm ngặt ngăn ngừa tai nạn lao động. Sử dụng thiết bị bảo hộ cá nhân (PPE) phù hợp là điều kiện tiên quyết cho mọi hoạt động bảo trì.
- Xác minh nguồn: Đảm bảo cầu dao chính đã được ngắt.
- Đo điện áp: Dùng đồng hồ VOM kiểm tra điện áp trên bus DC (< 40V).
- Xả điện áp: Chờ thời gian xả điện (Discharge Time) khuyến nghị (thường 5-10 phút).
- Sử dụng PPE: Mang găng tay cách điện và kính bảo hộ.

1.2. Thu thập thông tin sự cố
Thu thập thông tin chính xác tối ưu hóa quy trình chẩn đoán lỗi. Kỹ thuật viên cần ghi lại mã lỗi (Error Code) hiển thị trên màn hình Driver/Bộ điều khiển (Controller). Mỗi mã lỗi tương ứng với một nguyên nhân cụ thể trong sổ tay hướng dẫn. Việc xem xét lịch sử sự cố giúp xác định tần suất và điều kiện xảy ra lỗi. Đôi khi, lỗi chỉ xuất hiện khi tốc độ hoặc tải trọng đạt đến ngưỡng nhất định. Kiểm tra đèn trạng thái (Status LEDs) trên Driver (ví dụ: POWER, FAULT, ALARM) cung cấp chỉ dẫn trực quan về tình trạng hoạt động.
- Mã lỗi hiện tại: (Ví dụ: AL.30, E.05)
- Mô tả lỗi: (Động cơ rung, không quay, mất vị trí)
- Tải trọng máy: (Đang chạy không tải hay tải tối đa)
- Nhiệt độ môi trường: (Ảnh hưởng đến quá nhiệt – OVT)
2. 5 Sự cố Động cơ Servo Thường Gặp và Cách Khắc Phục Nhanh
Sự cố động cơ servo thường là biểu hiện vật lý của lỗi điện hoặc lỗi tham số. Việc phân loại các lỗi này đơn giản hóa quá trình tìm kiếm giải pháp.
2.1. Lỗi Không Khởi Động hoặc Không Có Điện (No Power/Start-up Failure)
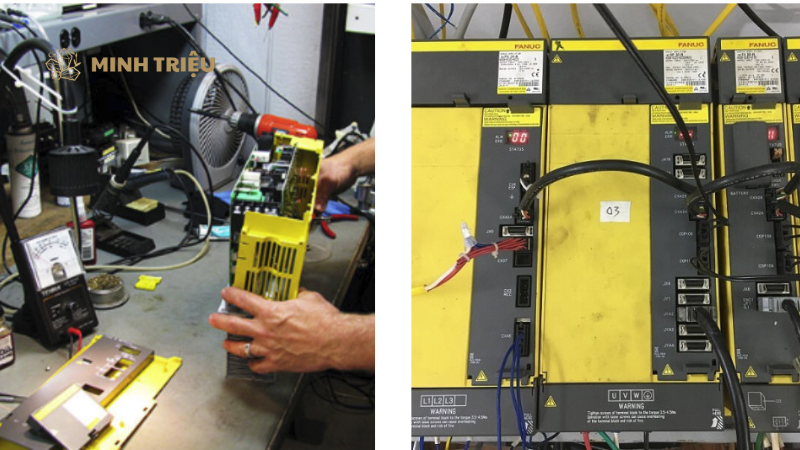
Động cơ không khởi động là lỗi phổ biến nhất trong các hệ thống truyền động. Kỹ thuật viên phải kiểm tra nguồn cấp chính (Main Voltage) đầu vào Driver. Nguồn cấp phải đảm bảo điện áp theo thông số kỹ thuật (ví dụ: 220V/380V). Lỗi này thường do cầu chì (Fuse) trong tủ điện bị cháy hoặc dây cấp nguồn điều khiển (Control Power) bị lỏng. Driver servo yêu cầu hai nguồn điện riêng biệt: Nguồn chính (Power) và Nguồn điều khiển (Control). Hành động khắc phục bao gồm xác nhận điện áp đầu vào tại các chân L1, L2, L3 (hoặc R, S, T) bằng đồng hồ VOM.
2.2. Lỗi Quá Nhiệt Động Cơ (Overheating – OVT)
Lỗi quá nhiệt (OVT) là cảnh báo nghiêm trọng về tình trạng hoạt động. Nguyên nhân nhanh của OVT là tải quá nặng (Overload) hoặc chu kỳ hoạt động (Duty Cycle) quá cao. Động cơ servo không được thiết kế để chạy ở mô-men xoắn tối đa liên tục. Kỹ thuật viên cần kiểm tra quạt làm mát của động cơ và tủ điện có hoạt động không. Bụi bẩn hoặc tắc nghẽn cũng gây cản trở quá trình tản nhiệt. Hành động khắc phục bao gồm giảm tải tạm thời và kiểm tra cài đặt tham số mô-men xoắn (Torque Limit) trong Driver.
2.3. Lỗi Quá Dòng/Quá Áp/Mất Pha (OC, OV, UV)
Các lỗi điện áp/dòng điện (OC, OV, UV) phản ánh vấn đề trong mạch công suất.
- Quá dòng (OC – Overcurrent): Lỗi OC thường xảy ra do cáp động cơ (Motor Cable) bị chạm vỏ (Ground Fault) hoặc chạm pha (Short Circuit). Kỹ thuật viên cần đo điện trở giữa ba pha U, V, W với đất (vỏ động cơ). Nếu điện trở thấp, cáp cần được thay thế.
- Quá áp/Sụt áp (OV/UV – Overvoltage/Undervoltage): Lỗi này thường do điện áp lưới không ổn định hoặc điện trở xả (Regenerative Resistor) bị hỏng. Khi động cơ giảm tốc, nó tạo ra năng lượng và đẩy ngược về bus DC. Điện trở xả tiêu thụ năng lượng dư này. Nếu OV xảy ra, kiểm tra kết nối của điện trở xả.
2.4. Lỗi Bộ Mã Hóa (Encoder/Feedback Error)
Lỗi Bộ Mã Hóa (Encoder/Feedback Error) là nguyên nhân chính gây ra hiện tượng động cơ rung lắc hoặc mất vị trí điều khiển. Bộ mã hóa là thiết bị phản hồi vị trí quan trọng nhất. Triệu chứng dễ thấy là động cơ rung lắc (Hunting/Oscillation). Kỹ thuật viên phải kiểm tra độ chắc chắn của cáp Encoder. Các chân kết nối có thể bị lỏng hoặc oxy hóa do môi trường ẩm ướt.
Việc kiểm tra tín hiệu Encoder bằng máy hiện sóng (Oscilloscope) là bước tiếp theo. Đảm bảo tấm chắn (Shielding) của cáp Encoder được nối đất (Ground) đúng cách ngăn chặn nhiễu điện từ (EMI).
2.5. Lỗi Vị trí và Độ trễ Đáp ứng (Position Error/Lag)
Lỗi vị trí là sự khác biệt giữa vị trí mong muốn và vị trí thực tế của động cơ. Triệu chứng là động cơ không đạt đến vị trí đã đặt hoặc dừng không chính xác. Lỗi này thường xuất phát từ điều chỉnh tham số (Tuning Parameters) chưa tối ưu. Giá trị độ lợi vòng lặp vị trí (Position Loop Gain) quá thấp gây ra độ trễ (Lag) lớn. Kỹ thuật viên nên kiểm tra giá trị Lag hiển thị trên Driver. Nếu độ trễ lớn, cần tăng độ lợi (Gain) lên dần dần. Tuy nhiên, việc tăng Gain quá cao gây ra rung động và tiếng ồn.
Bảng 1: Hướng dẫn Khắc phục Lỗi nhanh cho Động cơ Servo
| Mã Lỗi Phổ Biến | Nguyên Nhân Cơ bản | Hành Động Khắc Phục Ban Đầu (S-P-O) |
|---|---|---|
| OC (Overcurrent) | Chạm pha cáp động cơ | Kỹ thuật viên kiểm tra cáp động cơ bằng đồng hồ VOM. |
| OV (Overvoltage) | Điện trở xả không kết nối | Kỹ thuật viên xác nhận kết nối điện trở xả. |
| OVT (Overheating) | Tải cơ khí quá lớn | Kỹ thuật viên giảm tải trọng hoạt động tạm thời. |
| AL.30 (Encoder Error) | Cáp phản hồi bị lỏng | Kỹ thuật viên siết chặt đầu nối cáp Encoder. |
| UV (Undervoltage) | Mất một pha điện áp lưới | Kỹ thuật viên đo lường ba pha nguồn cấp. |
3. Kiểm tra Hệ thống và Cấu hình (System & Configuration Checks)
Việc khắc phục sự cố hiệu quả mở rộng phạm vi sang hệ thống điều khiển và cơ khí. Lỗi thường không nằm ở riêng Động cơ Servo mà có thể do cài đặt tham số hoặc vấn đề cơ khí.
3.1. Kiểm tra Cáp và Đầu nối (Cabling Integrity)
Cáp truyền động đóng vai trò truyền tải điện năng và dữ liệu phản hồi quan trọng. Cáp động cơ bị hỏng dẫn đến lỗi Quá Dòng (OC). Cáp Encoder bị hỏng gây ra lỗi Phản Hồi (Feedback Error). Kỹ thuật viên phải thực hiện kiểm tra toàn bộ cáp từ Driver đến Motor. Kiểm tra cần bao gồm độ uốn cong của cáp trong xích cáp (Cable Carrier) và tình trạng đầu nối. Vị trí cáp bị nhiễu điện từ (EMI) cũng cần được xem xét. Việc thay thế cáp bị đứt hoặc lỏng chân PIN là hành động bắt buộc.
- Cáp Công suất: Kiểm tra tính liên tục (Continuity) và điện trở cách điện giữa các lõi.
- Cáp Phản hồi (Encoder): Đảm bảo tấm chắn cáp (Shield) được nối đất ở Driver.
- Vị trí cáp: Xác nhận cáp công suất và điều khiển tách biệt nhau tối thiểu 15cm.
3.2. Đánh giá Hệ thống Cơ khí (Mechanical System Assessment)
Hệ thống cơ khí bị lỗi tác động trực tiếp đến hiệu suất servo. Vòng bi động cơ bị kẹt hoặc bộ truyền động (ví dụ: vít me, đai) quá căng tăng mô-men xoắn cần thiết. Kỹ thuật viên cần kiểm tra độ trơn tru của cơ cấu chuyển động bằng tay. Lực cản quá mức gây ra lỗi Quá Tải (Overload) hoặc rung động khi chạy. Việc xác định lỗi cơ khí là bước phân loại sự cố quan trọng trước khi can thiệp vào điện. Đảm bảo ly hợp (Coupling) giữa động cơ và tải được căn chỉnh chính xác.
3.3. Xác minh Tham số Driver (Parameter Verification)
Lỗi cài đặt tham số là nguyên nhân thường xuyên của sự cố vận hành. Kỹ thuật viên phải kiểm tra các tham số quan trọng trong Driver Servo.
- Tỷ lệ điện tử (Electronic Gear Ratio): Xác định độ phân giải của vị trí. Giá trị sai gây ra lỗi định vị.
- Tham số Gain (Độ lợi): Giá trị P-Gain và I-Gain ảnh hưởng trực tiếp đến đáp ứng và độ ổn định.
- Giới hạn mô-men xoắn (Torque Limit): Giá trị này ngăn ngừa hư hỏng cơ khí do quá tải.
Việc lưu trữ bản sao tham số (Parameter Backup) gốc giúp khôi phục cài đặt nhanh chóng sau sự cố.
4. Phương pháp Chẩn đoán Nâng cao và Công cụ (Advanced Diagnosis)
Khắc phục sự cố ban đầu đôi khi yêu cầu công cụ và kỹ thuật chẩn đoán chuyên sâu hơn.
4.1. Sử dụng Chức năng Tự Động Điều Chỉnh (Auto-Tuning)
Driver Servo hiện đại tích hợp chức năng Tự Động Điều Chỉnh (Auto-Tuning). Chức năng này tự động tính toán và cài đặt các tham số Gain tối ưu. Kỹ thuật viên nên kích hoạt Auto-Tuning sau khi tải cơ khí được lắp đặt. Quá trình này giúp hệ thống đạt được độ đáp ứng cao và giảm rung động. Nếu Auto-Tuning thất bại, nó chỉ ra vấn đề cơ khí hoặc Driver đang gặp lỗi.

4.2. Phân tích Dữ liệu Hệ thống (System Data Analysis)
Phân tích dữ liệu là cách chẩn đoán hiệu quả nhất cho các lỗi không liên tục. Driver Servo cung cấp chức năng theo dõi (Monitoring) các giá trị tức thời. Kỹ thuật viên ghi lại biểu đồ của các thông số như Mô-men xoắn lệnh (Command Torque), Vị trí sai lệch (Position Error), và Tốc độ thực tế. Phân tích biểu đồ xác định nguyên nhân gốc rễ của rung động hoặc quá tải. Một đỉnh mô-men xoắn bất thường chỉ ra điểm ma sát cao trong cơ khí.
Bảng 2: Phân tích Dữ liệu Driver và Ý nghĩa
| Dữ liệu Theo dõi (Monitor Data) | Triệu Chứng Rung Động/Lỗi | Ý Nghĩa (S-P-O) |
|---|---|---|
| Position Error (PE) | Giá trị PE dao động lớn | Hệ thống cần tăng Độ lợi Vị trí (Position Gain). |
| Command Torque | Đỉnh mô-men xoắn đột ngột | Tải cơ khí gặp phải chướng ngại vật tức thời. |
| Motor Speed (RPM) | Tốc độ thực tế không ổn định | Khả năng cao là nhiễu tín hiệu Encoder hoặc lỗi Driver. |
| Bus DC Voltage | Điện áp tăng vượt ngưỡng OV | Điện trở xả không hoạt động hoặc bị ngắt kết nối. |
5. Kết luận
Khắc phục sự cố ban đầu của động cơ servo là kỹ năng then chốt trong sản xuất công nghiệp. Quá trình troubleshooting yêu cầu tư duy logic và kiến thức chuyên sâu về cả điện và cơ khí. Việc nắm vững quy trình kiểm tra an toàn LOTO, phân tích mã lỗi, và xác minh tham số sẽ giúp kỹ thuật viên giải quyết hầu hết các vấn đề nhanh chóng. Giảm thiểu thời gian chết là mục tiêu cuối cùng, và việc đầu tư vào đào tạo kỹ thuật viên là chiến lược kinh doanh thông minh.