
Động cơ servo
Hướng Dẫn Chi Tiết Tiếp Địa và Chống Nhiễu Cho Hệ Thống Servo đúng chuẩn

Hướng dẫn chuyên sâu về Tiếp địa và chống nhiễu cho hệ thống servo là giải pháp kỹ thuật thiết yếu để loại bỏ Nhiễu điện từ trong môi trường sản xuất công nghiệp. Bài viết phân tích nguyên nhân gây Nhiễu Common-Mode, chiến lược Tiếp đất Tần số Cao, và cách áp dụng Nối đất 360 độ để đảm bảo độ tin cậy vận hành và tương thích điện từ (EMC Servo) theo Tiêu chuẩn IEC 61800-3.
1. Vai trò Sống còn của Tiếp địa và Che chắn
1.1. Tại sao EMC là thách thức lớn nhất của Servo Drive?
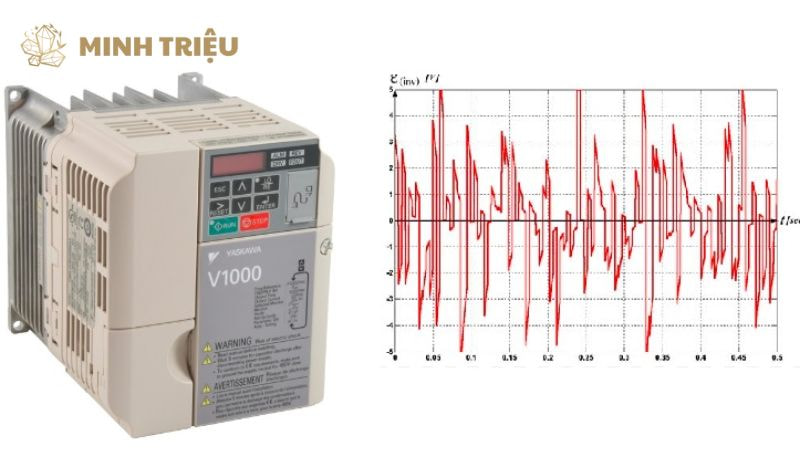
Công nghệ PWM (Pulse Width Modulation) tạo ra xung điện áp cao và nhiễu điện từ đáng kể, đó là lý do EMC luôn là thách thức lớn nhất đối với Servo Drive hiện đại. Bản chất của điều chế độ rộng xung yêu cầu các linh kiện bán dẫn (IGBT/MOSFET) thực hiện việc đóng cắt (switching frequency) ở tốc độ cực kỳ nhanh (thường từ 4 kHz đến 16 kHz, gây ra sự thay đổi điện áp lớn và đột ngột theo thời gian (dV/dt).
Hiện tượng dV/dt cao này kích hoạt các dòng điện dung ký sinh (parasitic capacitance) chạy qua motor và vỏ máy, chuyển hóa thành Nhiễu Common-Mode mạnh mẽ, lan truyền khắp hệ thống và môi trường xung quanh. Hệ thống servo hiện đại yêu cầu độ chính xác cao từ các phản hồi vị trí (như Encoder) và tín hiệu điều khiển tốc độ, do đó rất dễ bị tổn thương bởi nhiễu điện từ. Mức độ nghiêm trọng của vấn đề tăng lên khi chiều dài Cáp motor kéo dài, biến chúng thành anten phát xạ nhiễu hiệu quả.
1.2. Mục tiêu của “Tiếp địa và Chống nhiễu”
Mục tiêu của “Tiếp địa và Chống nhiễu” là thiết lập một nền tảng điện từ vững chắc nhằm bảo vệ tính toàn vẹn và hiệu suất của hệ thống servo trong mọi điều kiện vận hành. Đảm bảo An toàn (Safety) là ưu tiên hàng đầu, bởi vì hệ thống tiếp địa hiệu quả có nhiệm vụ loại bỏ rủi ro điện giật cho người vận hành, đồng thời ngăn chặn các lỗi mạch an toàn quan trọng như STO (Safe Torque Off) hoặc SS1 (Safe Stop 1) do nhiễu gây ra.
Mục tiêu thứ hai là đảm bảo Tương thích Điện từ (EMC) tuyệt đối, trong đó các giải pháp chống nhiễu đảm bảo ngăn chặn nhiễu phát ra từ drive (Phát xạ) và tăng cường khả năng chịu đựng của drive đối với nhiễu từ bên ngoài (Miễn nhiễm). Việc đạt được các mục tiêu này đòi hỏi sự kết hợp giữa Tiếp đất Tần số Cao và kỹ thuật che chắn tối ưu.
2. Phân tích Các Loại Nhiễu trong Hệ thống Servo
2.1. Nhiễu Chế độ Chung (Common-Mode Noise)
Nhiễu Chế độ Chung (Common-Mode Noise) được coi là kẻ thù số 1 trong các ứng dụng servo do mức độ tàn phá và độ khó trong việc giảm thiểu của nó. Định nghĩa của nhiễu này là dòng nhiễu chạy cùng chiều trên tất cả các dây dẫn của Cáp motor (bao gồm cả ba pha và dây tiếp đất nếu có) và quay trở lại qua dây Tiếp đất hoặc lớp Vỏ bọc cáp (Shield). Nguồn gốc chính của Nhiễu Common-Mode xuất phát từ sự chênh lệch điện áp nhanh chóng (dV/dt) giữa cuộn dây motor và vỏ motor (Frame Ground).
Sự đóng cắt PWM tạo ra điện áp xung, buộc dòng điện tần số cao (High-frequency current) phải tìm đường trở về nguồn qua các đường dẫn ký sinh. Dòng nhiễu này có thể gây ra ăn mòn bạc đạn (Bearing Current) trong motor và gây nhiễu nghiêm trọng cho các đường tín hiệu nhạy cảm (như tín hiệu Encoder và mạng truyền thông công nghiệp).
2.2. Nhiễu Chế độ Đối Xứng (Differential-Mode Noise)
Nhiễu Chế độ Đối Xứng (Differential-Mode Noise) là dòng nhiễu chạy ngược chiều nhau giữa hai dây dẫn (ví dụ: chạy trên Line và trở về trên Neutral), tạo thành một vòng lặp dòng điện đóng kín. Định nghĩa của nhiễu này chỉ ra rằng nó thường liên quan đến chất lượng nguồn điện, chẳng hạn như sóng hài (Harmonics) hoặc các xung dòng điện do tải cảm ứng lớn gây ra.
Mặc dù ít phổ biến hơn Nhiễu Common-Mode trong việc gây ra các lỗi hoạt động tức thời trong Servo Drive, nhiễu đối xứng vẫn cần được xử lý bằng Lọc nhiễu Servo thích hợp, chủ yếu là Bộ lọc Đường dây EMC, để đảm bảo tuân thủ các giới hạn Tiêu chuẩn IEC 61800-3 về Phát xạ Dẫn.
2.3. Hậu quả của Tiếp địa và Che chắn Kém
Hậu quả của Tiếp địa và Che chắn Kém là sự suy giảm độ tin cậy vận hành và tính toàn vẹn của hệ thống tự động hóa. Khi nhiễu không được kiểm soát, nó sẽ dẫn đến các lỗi liên tục và khó xác định nguyên nhân: Lỗi Encoder (mất xung hoặc đọc sai vị trí), hiện tượng mất đồng bộ giữa các trục, hoặc motor bị giật (hunting) trong quá trình điều khiển vòng kín.
Ở mức độ nghiêm trọng hơn, Nhiễu điện từ có thể gây ra hỏng hóc thiết bị: Phá hủy cổng truyền thông (Ethernet/Fieldbus), gây lỗi I/O của PLC/HMI, và quan trọng nhất là rút ngắn tuổi thọ của Motor (do dòng điện bạc đạn) và Drive (do quá tải nhiễu trên các mạch lọc).
3. Chiến lược Tiếp địa Tần số Cao (High-Frequency Grounding)
Tiếp đất là giải pháp hiệu quả nhất để xử lý Nhiễu Chế độ Chung bằng cách cung cấp một con đường trở kháng thấp để dòng nhiễu quay trở lại nguồn một cách an toàn và kiểm soát.
3.1. Nguyên tắc Tiếp đất Diện rộng (Large-Area Grounding)
Nguyên tắc Tiếp đất Diện rộng (Large-Area Grounding) đặt trọng tâm vào việc giảm thiểu trở kháng của đường dẫn tiếp địa, đặc biệt ở Tần số Cao. Trở kháng thấp ở Tần số Cao là tầm quan trọng sống còn vì dòng Nhiễu Common-Mode có tần số từ hàng trăm kHz đến vài MHz. Trở kháng của dây dẫn tăng lên theo tần số, do đó dây tiếp đất mỏng (mặc dù có trở kháng thấp ở 50/60 Hz) sẽ trở thành đường dẫn trở kháng cao đối với nhiễu.
Chiến lược tối ưu là sử dụng tiếp xúc diện rộng thông qua các bề mặt kim loại phẳng và không sơn (như tấm tiếp địa hoặc khung tủ điện). Sử dụng kẹp tiếp đất (Grounding Clamps) là bắt buộc thay vì chỉ sử dụng dây tiếp đất mỏng, bởi vì kẹp cung cấp diện tích tiếp xúc lớn hơn nhiều cho vỏ bọc cáp (Shield), đảm bảo trở kháng tối thiểu cho dòng nhiễu tần số cao.
3.2. Kỹ thuật Tiếp địa cho Servo Drive và Filter
Kỹ thuật Tiếp địa cho Servo Drive và Filter yêu cầu sự chặt chẽ và nhất quán trong mọi kết nối. Yêu cầu kết nối 360 độ là điều kiện tiên quyết, nhằm đảm bảo vỏ bọc cáp motor (Shield) tiếp xúc toàn bộ và liên tục với vỏ kim loại của tủ điện tại điểm đi qua (chỗ thoát cáp). Phương pháp này cung cấp một đường dẫn trở kháng thấp lý tưởng cho dòng Nhiễu Common-Mode quay trở lại Servo Drive mà không bị bức xạ ra ngoài.
Lắp đặt EMC Line Filter phải được thực hiện trực tiếp trên tấm kim loại tiếp đất của tủ, có tác dụng tối đa hóa hiệu suất lọc. Mối nối giữa vỏ kim loại của Filter và tấm tiếp đất phải đảm bảo độ sạch sẽ và không có sơn, sử dụng các vít kim loại hoặc kẹp chuyên dụng.
Các bước thực hiện Tiếp địa Tần số Cao cho Drive/Filter:
- Chuẩn bị bề mặt: Tấm lắp đặt drive và filter phải được đảm bảo không có sơn, sạch sẽ và có độ dẫn điện cao.
- Vị trí Filter: EMC Line Filter cần được đặt càng gần điểm vào cáp nguồn của tủ điện càng tốt, để nhiễu bị triệt tiêu ngay khi vào hệ thống.
- Kết nối Filter: Vỏ kim loại của Filter phải được kết nối với mặt đất tủ thông qua diện tích lớn nhất có thể (chứ không chỉ qua chân tiếp địa).
- Cáp Motor 360 độ: Sử dụng kẹp tiếp đất chuyên dụng để cố định và tiếp xúc hoàn toàn vỏ bọc cáp motor với mặt đất kim loại ngay tại điểm drive.
3.3. Tiếp địa cho Motor Servo
Tiếp địa cho Motor Servo là bước cuối cùng trong chuỗi tiếp địa, có vai trò dẫn dòng nhiễu ra khỏi vỏ motor một cách an toàn. Việc này đòi hỏi motor phải được gắn chắc chắn và có độ tiếp xúc điện trở thấp với khung máy (Frame Grounding) thông qua bề mặt lắp đặt.
Các motor hiện đại thường có một điểm tiếp địa riêng biệt trong hộp đấu dây, nhưng việc tiếp xúc vật lý giữa vỏ motor và khung máy (là một phần của hệ thống tiếp địa tổng thể) vẫn đóng vai trò quan trọng trong việc quản lý nhiễu tần số cao. Kỹ sư cần kiểm tra điện trở tiếp đất tại Motor, đảm bảo giá trị này nằm trong giới hạn cho phép (thường < $0.1\ \Omega$) để xác nhận tính toàn vẹn của đường dẫn tiếp địa.
4. Kỹ thuật Che chắn (Shielding) và Quản lý Cáp Chống Nhiễu
Kỹ thuật Che chắn và Quản lý Cáp là phương pháp trực tiếp để kiểm soát Nhiễu điện từ trong quá trình truyền tải điện năng và tín hiệu.
4.1. Yêu cầu Bắt buộc về Cáp Motor và Cáp Feedback
Yêu cầu Bắt buộc về Cáp Motor và Cáp Feedback đề ra tiêu chuẩn nghiêm ngặt cho việc chọn lựa vật liệu truyền dẫn trong hệ thống servo. Sử dụng cáp Motor có vỏ bọc lưới/bện (braided shield) chất lượng cao là điều kiện tiên quyết, bởi vì vỏ bọc bện cung cấp độ che chắn tốt hơn nhiều so với vỏ bọc lá nhôm (foil shield) đối với Nhiễu Common-Mode tần số cao.
Cáp tín hiệu (Encoder/Feedback) phải luôn là loại xoắn đôi (Twisted-Pair) và có vỏ bọc riêng (Shielded Cable). Dây xoắn đôi có tác dụng triệt tiêu nhiễu chế độ đối xứng (Differential-mode noise) gây ra bởi các tín hiệu xung, trong khi vỏ bọc bảo vệ chống lại Nhiễu Common-Mode và Phát xạ Bức xạ từ bên ngoài.
4.2. Chi tiết về Kết nối Che chắn 360 độ
Kết nối Che chắn 360 độ là kỹ thuật quan trọng nhất để chống nhiễu bức xạ hiệu quả. Nguyên tắc cơ bản là đảm bảo lớp vỏ bọc cáp (Shield) được kết nối với mặt đất kim loại qua một diện tích tiếp xúc lớn nhất có thể (toàn bộ chu vi cáp), có tác dụng tối đa hóa khả năng dẫn dòng Nhiễu Common-Mode về đất. Vấn đề Ground Loops (Vòng lặp đất) cần được giải thích rõ: Vỏ bọc cáp tín hiệu (thường là cáp Encoder) chỉ nên được tiếp đất ở một đầu (thường là đầu Drive) để tránh hình thành vòng lặp đất.
Tuy nhiên, đối với Cáp motor, Nối đất 360 độ được khuyến nghị ở cả hai đầu (Drive và Motor) để quản lý dòng nhiễu tần số cao, mặc dù đây có thể gây tranh cãi về mặt lý thuyết, trong thực tế, nó thường mang lại hiệu quả EMC tốt nhất. Cách sử dụng kẹp tiếp đất (Shield Clamps) là lắp đặt để kết nối vỏ cáp với thanh tiếp đất trong tủ, thay thế cho việc sử dụng dây pig-tail (dây nhỏ nối từ vỏ bọc cáp ra đất) có trở kháng cao.

4.3. Quản lý Bố trí Cáp (Cable Routing)
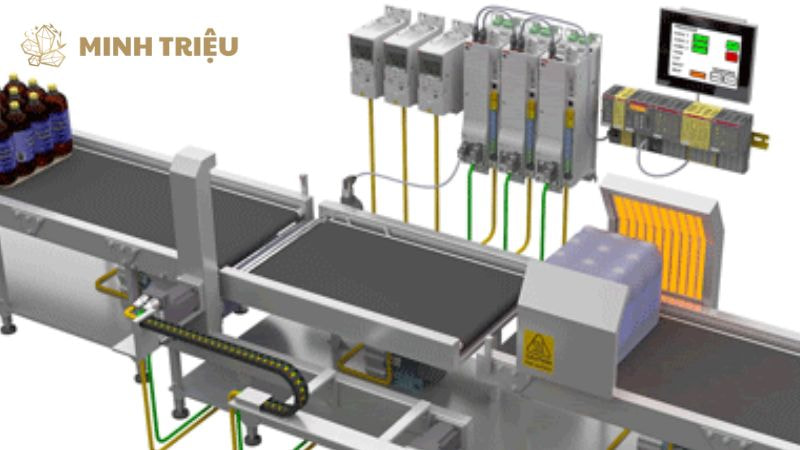
Quản lý Bố trí Cáp là chiến lược thiết kế nhằm giảm thiểu hiện tượng ghép nối điện từ giữa các loại cáp khác nhau. Quy tắc Tách Cáp đòi hỏi sự phân tách vật lý rõ ràng giữa ba nhóm cáp chính:
- Cáp Điện lực (Power Cables): Cáp nguồn AC/DC và cáp đầu vào filter.
- Cáp Motor/Drive Output: Cáp motor chính và cáp phanh (Brake).
- Cáp Tín hiệu Nhạy cảm (Signal/Data/Safety): Cáp Encoder, cáp Fieldbus (Profinet, EtherCAT), và tín hiệu an toàn.
Tầm quan trọng của khoảng cách tối thiểu (thường là $20\text{ cm}$ đến $30\text{ cm}$) là để ngăn chặn nhiễu điện từ từ Cáp motor cường độ cao cảm ứng sang các đường tín hiệu nhạy cảm. Sử dụng ống dẫn kim loại (Metal Conduit) là một biện pháp tăng cường, có mục đích cung cấp thêm lớp che chắn và tiếp đất cho cáp tín hiệu nếu chúng phải chạy gần cáp điện lực.
5. Tích hợp và Lựa chọn Thiết bị Giảm Nhiễu (EMC Accessories)
Tích hợp và Lựa chọn Thiết bị Giảm Nhiễu là bước tối ưu hóa cuối cùng để đạt được tương thích điện từ (EMC Servo), đặc biệt là khi tuân thủ Tiêu chuẩn IEC 61800-3 yêu cầu mức C3/C4 nghiêm ngặt.
5.1. Vai trò của Bộ lọc Đường dây EMC (EMC Line Filter)
Vai trò của Bộ lọc Đường dây EMC (EMC Line Filter) là triệt tiêu Phát xạ Dẫn quay ngược trở lại lưới điện chính, đảm bảo Servo Drive không làm ô nhiễm môi trường điện từ của hệ thống. Vị trí lắp đặt phải là ngay đầu vào nguồn của Servo Drive, có tác dụng ngăn nhiễu ngay tại nguồn phát.
Cách lựa chọn bộ lọc cần phải phù hợp với dòng điện định mức và điện áp nguồn của drive, đồng thời quan trọng nhất là chứng chỉ tuân thủ các giới hạn Tiêu chuẩn IEC 61800-3 cho môi trường tương ứng (C3/C4). Bộ lọc có cấu tạo chủ yếu từ các cuộn cảm và tụ điện Y (Y-capacitors) để triệt tiêu Nhiễu Common-Mode và tụ điện X (X-capacitors) để triệt tiêu Nhiễu Differential-Mode.
5.2. Ứng dụng Ferrite Core (Lõi Ferrite)
Ứng dụng Ferrite Core (Lõi Ferrite) là một kỹ thuật giảm thiểu Nhiễu Common-Mode thụ động và kinh tế. Mục đích của Ferrite Core là hấp thụ năng lượng nhiễu tần số cao và chuyển hóa nó thành nhiệt lượng. Vị trí lắp đặt tối ưu là gần Servo Drive (trên Cáp motor và cáp tín hiệu) và gần thiết bị nhận (đầu Encoder hoặc PLC).
Lõi Ferrite hoạt động hiệu quả nhất trên dải tần số nhiễu cao mà EMC Filter có thể đã bỏ sót. Kỹ thuật quấn cáp qua lõi Ferrite có ảnh hưởng đáng kể đến hiệu quả: số vòng quấn càng nhiều (thường là 3 đến 5 vòng), trở kháng đối với dòng Nhiễu Common-Mode càng tăng, dẫn đến khả năng triệt tiêu nhiễu càng lớn.

5.3. Sử dụng Motor Filter (Bộ lọc Motor)
Sử dụng Motor Filter (Bộ lọc Motor) là cần thiết khi Cáp motor quá dài (> 25-30 m) hoặc khi motor không được thiết kế để chịu được điện áp dV/dt quá cao. Tác dụng chính của bộ lọc này là làm giảm tốc độ tăng điện áp dV/dt tại đầu motor và giảm thiểu dòng điện bạc đạn (Bearing Current), qua đó kéo dài tuổi thọ của motor. Bộ lọc Motor bao gồm Lọc Sinewave (Sine-wave Filter) để chuyển đổi tín hiệu xung PWM trở lại thành dạng sóng sin thuần túy, hoặc Lọc dV/dt (dV/dt Filter) để chỉ giảm độ dốc của xung điện áp, tùy thuộc vào yêu cầu và ngân sách của dự án.
6. Kết luận
Tuân thủ các nguyên tắc về Tiếp địa và chống nhiễu cho hệ thống servo là nền tảng không thể thiếu để xây dựng các máy móc và dây chuyền sản xuất có độ tin cậy vận hành cao và tuổi thọ lâu dài. Việc quản lý nhiễu điện từ không chỉ là một yêu cầu kỹ thuật mà còn là nghĩa vụ pháp lý để đạt được các chứng nhận quốc tế (như CE Mark). Kiểm tra nhanh (Checklist) là công cụ cần thiết cho mọi kỹ sư để xác minh tính toàn vẹn của việc lắp đặt EMC Servo trước khi vận hành. Việc tuân thủ checklist giúp giảm thiểu rủi ro phát sinh lỗi do nhiễu sau này.