
Động cơ servo
Lỗi quá nhiệt và cách xử lý toàn diện: Chìa khóa duy trì Độ tin cậy Sản xuất
Động cơ servo được xem là thành phần cơ điện tử cốt lõi, nó quyết định độ chính xác và hiệu suất của mọi hệ thống truyền động trong sản xuất công nghiệp, bao gồm máy CNC và Robot. Lỗi quá nhiệt servo đại diện cho một trong những mối đe dọa nghiêm trọng nhất đối với tính ổn định của dây chuyền sản xuất, nguyên nhân gây ra hỏng hóc vĩnh viễn như cháy cuộn dây hoặc phá hủy các module IGBT bên trong Servo Drive, từ đó dẫn đến sự cố dừng máy (Downtime) ngoài kế hoạch và chi phí sửa chữa servo đắt đỏ. Bài viết này sẽ tập trung phân tích chuyên sâu về lỗi quá nhiệt servo, phân loại nguyên nhân cốt lõi, và cung cấp quy trình xử lý lỗi quá nhiệt servo từng bước chi tiết.
1. Tổng quan: Định nghĩa và Phân loại Lỗi Quá Nhiệt Servo
1.1. Định nghĩa Quá nhiệt (Overheat)
Quá nhiệt là tình trạng nhiệt độ của động cơ hoặc bộ điều khiển vượt quá ngưỡng vận hành an toàn do nhà sản xuất quy định. Quá nhiệt Motor xảy ra khi nhiệt độ vỏ hoặc cuộn dây (stator winding) vượt qua giới hạn của Class cách điện (thường từ 130°C đến 155°C), gây ra sự lão hóa nhanh chóng và làm giảm độ bền cơ học của vật liệu cách điện.
Tương tự, Quá nhiệt Drive xảy ra khi nhiệt độ bộ tản nhiệt (heatsink) hoặc các linh kiện bán dẫn công suất (IGBT) bên trong Servo Drive vượt ngưỡng an toàn (thường trong khoảng 70-85°C), kích hoạt cơ chế bảo vệ và ngắt hệ thống điều khiển. Sự chênh lệch nhiệt độ này là thông số kỹ thuật quan trọng mà kỹ thuật viên cần theo dõi, phân biệt giữa lỗi phát sinh từ Motor và lỗi phát sinh từ bộ khuếch đại.
1.2. Hậu quả nghiêm trọng của Lỗi Quá nhiệt
Lỗi quá nhiệt servo gây ra nhiều hậu quả nghiêm trọng, chủ yếu làm suy giảm tuổi thọ thiết bị và dẫn đến thiệt hại sản xuất không thể phục hồi. Hậu quả vật lý đáng kể nhất là sự phá hủy cách điện cuộn dây, dẫn đến ngắn mạch chạm đất hoặc ngắn mạch giữa các pha, khiến Motor cháy hỏng vĩnh viễn và không thể quấn lại được.
Về mặt vận hành, nhiệt độ tăng cao làm giảm độ tin cậy của hệ thống, đồng thời dẫn đến lỗi dừng máy ngay lập tức, làm gián đoạn toàn bộ quy trình sản xuất. Quy tắc kỹ thuật quan trọng chỉ ra rằng, mỗi 10°C nhiệt độ tăng thêm so với định mức sẽ làm giảm một nửa tuổi thọ dự kiến của Motor.
2. Phân tích Nguyên nhân Gốc rễ (Root Causes) của Lỗi Quá Nhiệt
Việc xác định nguyên nhân gốc rễ là bước đầu tiên thiết yếu để thực hiện xử lý lỗi quá nhiệt servo triệt để. Các nguyên nhân gây ra quá nhiệt động cơ servo được phân loại thành ba nhóm chính: Cơ khí/Tải, Điện/Điều khiển, và Môi trường/Lắp đặt.
2.1. Nhóm Nguyên nhân Cơ khí và Tải (Motor Overload/Overheat)
Các yếu tố cơ khí và tải trọng không phù hợp là nguyên nhân phổ biến nhất gây ra Motor Overheat. Tình trạng quá tải cơ khí diễn ra khi yêu cầu mô-men xoắn (Torque) liên tục vượt quá khả năng định mức của Motor trong chu kỳ làm việc, khiến Motor hoạt động trong vùng bão hòa nhiệt. Ma sát cơ khí tăng cao trong hệ thống truyền động cũng là nguyên nhân trực tiếp, thường do hỏng vòng bi (bearing), ray trượt kẹt, hoặc lỗi bên trong hộp số giảm tốc, làm tăng lực cản và mô-men xoắn động cơ phải tạo ra.
Ngoài ra, tham số điều khiển Servo Gain không được tối ưu hóa trong quá trình Tuning (hiệu chỉnh) có thể khiến Motor dao động không cần thiết hoặc phản ứng quá mức với tín hiệu điều khiển, dẫn đến tiêu thụ dòng điện cao hơn bình thường và phát sinh nhiệt quá mức. Cuối cùng, Sai lệch trục (Misalignment) giữa trục Motor và trục tải gây ra lực bên (radial/axial load) bất thường lên vòng bi, dẫn đến mài mòn nhanh chóng và ma sát nhiệt.
2.2. Nhóm Nguyên nhân Điện và Điều khiển (Drive Overheat)
Lỗi phát sinh từ điện áp hoặc các thành phần điện tử công suất bên trong Servo Drive là nguyên nhân trực tiếp gây ra Drive Overheat. Hỏng Quạt tản nhiệt là sự cố vật lý đơn giản nhưng có tác động lớn, quạt bị kẹt hoặc hỏng làm giảm đáng kể khả năng làm mát bộ tản nhiệt, dẫn đến tăng nhiệt độ tức thì của module IGBT. Lỗi Bộ hãm tái sinh (Braking Resistor) là một vấn đề điện tử phổ biến, nếu điện trở hãm không hoạt động, bị đứt mạch, hoặc giá trị điện trở sai, năng lượng tái sinh từ Motor trong quá trình giảm tốc không được tiêu tán, gây nóng DC Bus và quá áp bên trong Drive, dẫn đến Drive Overheat.
Mặc dù không phải là lỗi quá nhiệt trực tiếp, lỗi Quá dòng (Overcurrent – OC) thường đi kèm với việc IGBT bị hỏng đột ngột, có thể gây nóng cục bộ và kích hoạt lỗi quá nhiệt Drive ngay lập tức trước khi xảy ra hỏng hóc nghiêm trọng hơn. Sự không ổn định của nguồn cấp (điện áp quá cao hoặc quá thấp) cũng làm cho mạch điện tử hoạt động ngoài vùng an toàn, gây ra nhiệt độ không mong muốn.
2.3. Nhóm Nguyên nhân Môi trường
Các yếu tố môi trường không được kiểm soát đóng vai trò quan trọng trong việc gây ra lỗi quá nhiệt servo. Nhiệt độ môi trường cao xung quanh vị trí lắp đặt Motor hoặc Servo Drive làm giảm khả năng tản nhiệt hiệu quả, đặc biệt trong các tủ điện không được trang bị hệ thống làm mát.
Sự Thông gió kém trong tủ điện, do lắp đặt Drive trong không gian quá kín hoặc không tuân thủ khoảng cách tản nhiệt tối thiểu, cản trở sự lưu thông không khí. Cuối cùng, Bụi bẩn và dầu mỡ tích tụ dày đặc trên bề mặt bộ tản nhiệt (heatsink) của Drive hoặc vỏ Motor tạo thành một lớp cách nhiệt, làm giảm khả năng truyền nhiệt ra môi trường và gây ra hiện tượng nóng lên.
3. Quy trình Chẩn đoán và Xử lý Lỗi Quá Nhiệt (Step-by-step Troubleshooting)
Quy trình xử lý lỗi quá nhiệt servo đòi hỏi một phương pháp tiếp cận có hệ thống, kết hợp giữa kiểm tra phần mềm, đo lường vật lý và phân tích điện.
3.1. Bước 1: Ghi nhận Mã lỗi và Tình trạng Vận hành
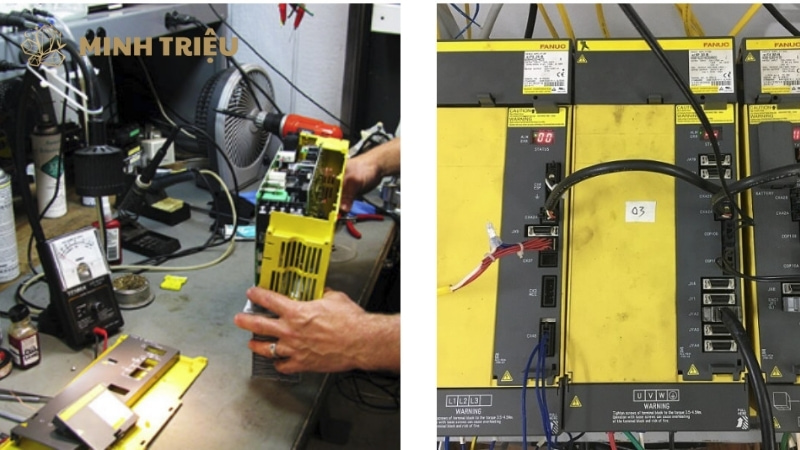
Kỹ thuật viên phải bắt đầu bằng việc đọc mã lỗi cụ thể hiển thị trên màn hình của Servo Drive (Ví dụ: Yaskawa: AL.30, Siemens: F7802), mã lỗi này cung cấp manh mối quan trọng về bản chất của sự cố (Motor hay Drive).
Việc kiểm tra Log lỗi (Fault Log) trên phần mềm cấu hình (như SigmaWin hoặc Starter) là bắt buộc, nhằm xem xét tần suất xảy ra lỗi và các thông số mô-men xoắn ngay trước khi lỗi xuất hiện, giúp xác định xem lỗi có phải do quá tải đột ngột hay tích lũy nhiệt độ dần dần. Việc ghi nhận tình trạng tải và tốc độ tại thời điểm lỗi cũng giúp kỹ thuật viên tái lập điều kiện lỗi.
3.2. Bước 2: Kiểm tra Vật lý và Đo nhiệt độ
Kiểm tra vật lý là bước quan trọng thứ hai, nhằm đánh giá các yếu tố cơ khí và môi trường xung quanh. Kỹ thuật viên cần kiểm tra Quạt của cả Motor và Drive, đảm bảo chúng quay tự do, không bị kẹt và không bị lưới lọc bụi bẩn che phủ hoàn toàn.
Việc đo nhiệt độ vỏ Motor và bộ tản nhiệt (heatsink) Drive bằng camera nhiệt hoặc nhiệt kế hồng ngoại là phương pháp định lượng, cho phép so sánh nhiệt độ đo được với nhiệt độ định mức để xác nhận mức độ nghiêm trọng của sự cố quá nhiệt động cơ servo. Đồng thời, cần kiểm tra vòng bi Motor bằng cách lắng nghe hoặc sử dụng thiết bị đo rung động cầm tay để phát hiện tiếng ồn hoặc rung động quá mức, dấu hiệu của ma sát cao.
3.3. Bước 3: Đo lường Điện và Cách điện
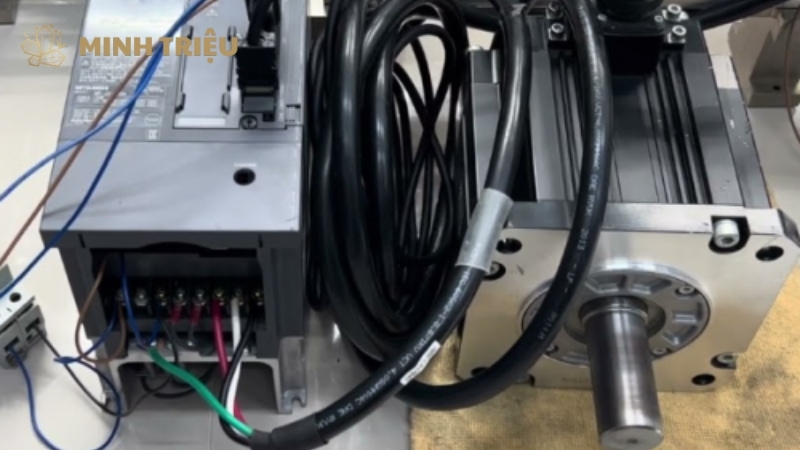
Quy trình đo lường điện phải được thực hiện sau khi đã Tắt nguồn và cách ly Motor hoàn toàn khỏi Drive, đảm bảo an toàn tuyệt đối. Đo điện trở cuộn dây Motor (pha-pha: U-V, V-W, W-U) là thao tác thiết yếu; các giá trị điện trở phải đồng đều và nằm trong phạm vi dung sai nhỏ so với thông số danh định, sự khác biệt lớn chỉ ra ngắn mạch hoặc hở mạch một pha.
Tiếp theo, việc Đo cách điện giữa từng pha và đất (pha-đất) bằng Megohm-kế (thiết bị đo điện trở cách điện) phải được thực hiện. Kết quả đo phải đạt hàng chục MΩ trở lên; nếu giá trị này thấp (ví dụ: < 1MΩ), nó chứng tỏ cách điện Motor đã bị lỗi do quá nhiệt tích lũy hoặc độ ẩm, đây là nguyên nhân gây ra lỗi quá nhiệt servo cuối cùng.

3.4. Bước 4: Khắc phục theo Loại Nguyên nhân
Việc xử lý lỗi quá nhiệt servo đòi hỏi các hành động khắc phục cụ thể tùy thuộc vào nhóm nguyên nhân đã được xác định.
Khắc phục lỗi do Cơ khí/Tải:
- Giảm tải: Cần giảm tải cơ khí nếu mô-men xoắn yêu cầu vượt quá định mức 100% của Motor liên tục; xem xét thay thế Motor công suất lớn hơn.
- Bôi trơn: Kiểm tra và bôi trơn các bộ phận truyền động (vòng bi, hộp số, thanh trượt) để giảm thiểu ma sát cao.
- Tuning: Thực hiện lại quy trình Auto-Tuning của Drive để tối ưu hóa tham số Servo Gain (độ lợi) và bộ lọc nhiễu, nhằm giảm thiểu dòng điện tiêu thụ không cần thiết và rung động.
Khắc phục lỗi do Drive:
- Làm sạch/Thay thế: Cần làm sạch bộ tản nhiệt và thay thế quạt Drive ngay lập tức nếu chúng bị hỏng hoặc hoạt động kém hiệu quả.
- Bộ hãm tái sinh: Kỹ thuật viên phải kiểm tra điện trở và kết nối của Bộ hãm tái sinh, đảm bảo nó tiêu tán đúng năng lượng tái sinh.
Khắc phục lỗi do Môi trường:
- Cải thiện thông gió: Cần tăng cường thông gió tủ điện bằng cách lắp đặt quạt hút/thổi hoặc điều hòa cho tủ điện trong môi trường làm việc khắc nghiệt.
- Làm sạch: Thực hiện vệ sinh định kỳ bụi bẩn và dầu mỡ trên các bề mặt tản nhiệt.
4. Giải pháp Phòng ngừa và Bảo trì Dự đoán (Predictive Maintenance)
Chiến lược phòng ngừa là biện pháp hiệu quả nhất để đảm bảo độ tin cậy của hệ thống và tránh các sự cố dừng máy do lỗi quá nhiệt servo.
4.1. Chiến lược Bảo trì Dự đoán
Bảo trì Dự đoán (Predictive Maintenance) sử dụng dữ liệu thời gian thực để đưa ra quyết định bảo trì trước khi sự cố xảy ra. Phân tích Rung động (Vibration Analysis) là một công cụ chẩn đoán quan trọng, nó theo dõi sự gia tăng biên độ rung động của Motor, giúp phát hiện sớm hỏng vòng bi hoặc sai lệch trục, nguyên nhân hàng đầu gây ra ma sát và quá nhiệt động cơ servo.
Việc Chụp ảnh Nhiệt Định kỳ (Thermography) sử dụng camera nhiệt để lập bản đồ nhiệt của Servo Drive và Motor là một phương pháp trực quan; việc phát hiện các điểm nóng bất thường (hotspot) trên vỏ Drive hoặc cáp kết nối báo hiệu lỗi sắp xảy ra của IGBT hoặc kết nối lỏng lẻo. Cuối cùng, giám sát Log (Fault Log) và Thông số Mô-men xoắn (Torque) liên tục giúp kỹ thuật viên nhận diện xu hướng sử dụng mô-men xoắn quá mức hoặc sự thay đổi trong tham số điều khiển, cho phép hiệu chỉnh Servo Gain trước khi Motor đạt đến tình trạng Motor Overheat.

4.2. Tiêu chuẩn Vận hành và Lắp đặt
Các tiêu chuẩn vận hành và lắp đặt chính xác giúp loại bỏ nhiều nguyên nhân gây ra lỗi quá nhiệt servo ngay từ đầu. Kỹ thuật viên cần đảm bảo lắp đặt có đủ khoảng cách tản nhiệt cho Drive trong tủ điện theo hướng dẫn của nhà sản xuất, tạo điều kiện cho luồng không khí lưu thông tối ưu.
Việc đào tạo kỹ thuật viên về tầm quan trọng của việc giữ sạch lưới lọc bụi và hệ thống tản nhiệt là một nhiệm vụ bảo trì quan trọng, giúp duy trì hiệu suất làm mát. Hơn nữa, việc đảm bảo sử dụng cáp Motor và cáp tín hiệu có kích thước và chất lượng đúng chuẩn giúp giảm thiểu tổn thất điện năng và nguy cơ ngắn mạch, bảo vệ Motor khỏi các sự cố điện.
5. Kết luận
Xử lý lỗi quá nhiệt servo là một quy trình kỹ thuật phức tạp đòi hỏi sự kết hợp nhuần nhuyễn giữa kiến thức về điện tử công suất, cơ khí chính xác và hệ thống điều khiển. Bài viết đã phân tích chi tiết các nguyên nhân gốc rễ và cung cấp quy trình chẩn đoán 4 bước hiệu quả. Việc chuyển đổi chiến lược bảo trì sang Predictive Maintenance, sử dụng các công cụ như Chụp ảnh Nhiệt Định kỳ và Phân tích Rung động, là chìa khóa để đảm bảo độ tin cậy tối đa và tránh được các sự cố dừng máy không mong muốn. Nắm vững các dấu hiệu cảnh báo sớm và áp dụng các biện pháp phòng ngừa là năng lực cốt lõi mà mọi kỹ thuật viên trong lĩnh vực sản xuất công nghiệp hiện đại cần phải sở hữu.