
Động cơ servo
Công Nghệ Bộ Lọc Kỹ Thuật Số Trong Servo Drive: Chìa Khóa Khử Rung Chấn và Tăng Tốc Độ Chính Xác

Trong công nghiệp 4.0, Servo Drive là bộ xử lý trung tâm, chuyển tín hiệu điều khiển thành chuyển động chính xác. Tuy nhiên, rung chấn và cộng hưởng từ cơ cấu máy có thể làm giảm băng thông điều khiển, kéo dài thời gian ổn định và ảnh hưởng độ chính xác Encoder. Bộ lọc kỹ thuật số trở thành giải pháp quan trọng giúp triệt tiêu rung chấn, tối ưu hóa điều khiển mà không cần chỉnh sửa cơ khí, cho phép tăng băng thông và cải thiện hiệu suất hệ thống. Bài viết sẽ phân tích cấu trúc, nguyên lý và vai trò của các bộ lọc như notch và thông thấp, đồng thời giải thích cách tinh chỉnh bộ lọc và dùng phân tích FFT để xử lý cộng hưởng.
1. Giới thiệu: Vai trò không thể thiếu của Bộ lọc trong Hệ thống Servo
1.1. Servo Drive và Vòng điều khiển kín
Servo Drive hoạt động như một bộ chuyển đổi thông minh, xử lý tín hiệu lệnh từ bộ điều khiển cấp cao (PLC, Motion Controller) và cung cấp công suất cần thiết cho Động cơ servo, đồng thời quản lý các vòng phản hồi. Hệ thống servo hiện đại sử dụng ba vòng điều khiển kín lồng nhau: vòng dòng điện (Current Loop), vòng tốc độ (Velocity Loop), và vòng vị trí (Position Loop). Để đạt được độ chính xác cao nhất.
Tín hiệu Phản hồi vị trí và tốc độ từ Encoder servo là dữ liệu đầu vào không thể thiếu, giúp bộ điều khiển tính toán liên tục mô-men xoắn yêu cầu thông qua thuật toán PID. Vai trò then chốt của bộ lọc kỹ thuật số là duy trì sự ổn định của hệ thống trong khi vẫn cho phép tăng độ lợi (gain) của bộ điều khiển lên mức cao nhất có thể.
Nếu không có bộ lọc, các tần số cộng hưởng và nhiễu điện tử sẽ bị khuếch đại bởi bộ điều khiển PID có độ lợi cao, dẫn đến dao động, quá nhiệt, và thậm chí là mất ổn định hoàn toàn. Bộ lọc kỹ thuật số được tích hợp ngay trong phần mềm Drive, thực hiện chức năng làm sạch tín hiệu trước khi nó được xử lý bởi thuật toán điều khiển, cho phép vòng điều khiển kín hoạt động chính xác và tối ưu hóa độ chính xác Encoder.
1.2. Thách thức Rung chấn và Cộng hưởng trong Cơ khí
Rung chấn và tần số cộng hưởng là những thách thức vật lý cố hữu mà mọi hệ thống servo tốc độ cao đều phải đối mặt, làm giảm nghiêm trọng hiệu suất động lực học. Hiện tượng cộng hưởng xảy ra khi tần số điều khiển kích thích (ví dụ: do bộ điều khiển PID) trùng với tần số tự nhiên của các thành phần cơ khí (như trục, khớp nối, hoặc bản thân khung máy). Sự trùng hợp này khiến biên độ dao động tăng đột biến, gây rung lắc mạnh, tăng lỗi theo dõi (tracking error), và kéo dài thời gian ổn định vị trí.
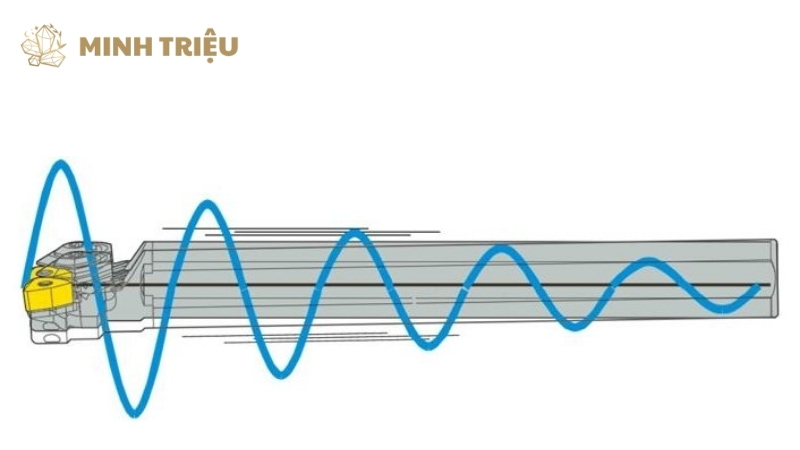
Những hệ quả tiêu cực của hiện tượng cộng hưởng và rung chấn bao gồm:
- Giới hạn Băng thông điều khiển: Cộng hưởng buộc kỹ sư phải giảm độ lợi PID, làm giảm khả năng đáp ứng và tốc độ phản hồi nhanh của hệ thống.
- Suy giảm Độ chính xác: Rung động làm giảm độ chính xác Encoder và chất lượng hoàn thiện bề mặt sản phẩm, đặc biệt trong các ứng dụng công nghiệp đòi hỏi độ tinh vi.
- Tăng Chi phí Bảo trì: Tải trọng động quá mức do rung chấn dẫn đến mài mòn nhanh chóng các bộ phận truyền động, làm tăng chi phí vòng đời (LCO) của máy móc.
Công nghệ bộ lọc kỹ thuật số được phát triển nhằm cung cấp một giải pháp hiệu quả và linh hoạt để triệt tiêu cộng hưởng một cách có chọn lọc.
2. Nguyên lý Cơ bản của Bộ lọc Kỹ thuật số Servo
2.1. Phân loại Bộ lọc Kỹ thuật số trong Drive
Bộ lọc kỹ thuật số trong Servo Drive là các thuật toán xử lý tín hiệu số được thiết kế để thay đổi phổ tần số của tín hiệu điều khiển hoặc tín hiệu phản hồi. Sự đa dạng về loại hình bộ lọc cho phép kỹ sư nhắm mục tiêu chính xác vào các vấn đề cụ thể, từ nhiễu tần số cao cho đến các tần số cộng hưởng hẹp.
Các bộ lọc này được phân loại dựa trên đáp ứng tần số và mục đích:
- Bộ lọc Loại bỏ Tần số Hẹp (Notch Filter): Mục tiêu là triệt tiêu các đỉnh tần số cộng hưởng rất hẹp, cho phép tăng băng thông điều khiển tối đa.
- Bộ lọc Thông Thấp (Low-Pass Filter – LPF): Chức năng là loại bỏ nhiễu tần số cao (High-frequency noise) và làm mịn tín hiệu.
- Bộ lọc Chống Cộng hưởng (Anti-Resonance Filter): Một thuật ngữ rộng hơn, thường bao gồm bộ lọc notch và các bộ lọc bù pha khác.
- Bộ lọc Lược (Comb Filter): Được sử dụng để loại bỏ nhiều tần số cộng hưởng cách đều nhau, điển hình là do các cơ cấu bánh răng.
- Bộ lọc Tối ưu hóa Chuyển động (Motion Smoothing Filters): Bao gồm Bộ lọc Độ dốc Tần số (S-Curve), nhằm làm mềm tín hiệu lệnh chuyển động và giảm Giật cục (Jerk).
Sự kết hợp linh hoạt của các bộ lọc kỹ thuật số này trong phần mềm Drive tạo nên Khả năng chống nhiễu và ổn định vượt trội cho hệ thống servo.
2.2. Sự khác biệt giữa Bộ lọc Cơ khí và Kỹ thuật số
Phương pháp giải quyết rung chấn và cộng hưởng có thể được chia thành hai lĩnh vực: cơ khí và điện tử. Phương pháp cơ khí truyền thống tập trung vào việc tăng độ cứng (stiffness), giảm khối lượng di chuyển, hoặc lắp đặt các bộ giảm chấn vật lý. Mặc dù hiệu quả, các giải pháp này thường tốn kém, khó thay đổi sau khi chế tạo, và đôi khi tăng khối lượng tổng thể của hệ thống.
Ngược lại, bộ lọc kỹ thuật số cung cấp một phương pháp can thiệp hoàn toàn linh hoạt và phi vật lý thông qua xử lý tín hiệu số. Lợi ích chính là khả năng thay đổi đáp ứng tần số của hệ thống chỉ bằng cách điều chỉnh thông số phần mềm mà không làm thay đổi cấu trúc cơ khí. Công nghệ bộ lọc kỹ thuật số cho phép loại bỏ các đỉnh cộng hưởng cụ thể chỉ trong mili giây, trong khi vẫn duy trì tốc độ phản hồi nhanh ở các dải tần số mong muốn. Sự kết hợp tối ưu là thiết kế cơ khí đủ tốt để giảm thiểu các đỉnh cộng hưởng lớn, sau đó sử dụng bộ lọc kỹ thuật số để tinh chỉnh và triệt tiêu cộng hưởng còn lại, đạt được hiệu suất động lực học vượt trội.

3. Các Loại Bộ lọc Kỹ thuật số Chủ yếu và Ứng dụng
3.1. Bộ lọc Notch (Notch Filter) – Công cụ Khử Cộng hưởng
Bộ lọc notch là công cụ kỹ thuật số đắc lực và quan trọng nhất được sử dụng trong Servo Drive để triệt tiêu tần số cộng hưởng hẹp. Nguyên lý hoạt động của bộ lọc này là tạo ra một mức suy giảm biên độ tín hiệu rất sâu (ví dụ: -20 dB) tại một tần số cộng hưởng chính xác đã được xác định. Bằng cách giảm năng lượng điều khiển tại tần số gây cộng hưởng, bộ lọc notch ngăn chặn hiệu quả sự khuếch đại rung động, cho phép kỹ sư tăng độ lợi của bộ điều khiển ở các dải tần số khác.
Để điều chỉnh bộ lọc notch hiệu quả, kỹ sư cần xác định và tối ưu hóa ba thông số chính:
- Tần số trung tâm (Center Frequency): Phải được đặt chính xác bằng tần số cộng hưởng đã đo lường.
- Độ sâu (Depth): Quyết định mức độ suy giảm năng lượng. Độ sâu lớn giúp khử rung chấn tốt hơn nhưng có nguy cơ gây dịch chuyển pha và mất ổn định ở biên.
- Độ rộng (Bandwidth/Q-factor): Xác định dải tần số bị ảnh hưởng. Bộ lọc notch lý tưởng phải có độ rộng hẹp nhất có thể để chỉ ảnh hưởng đến đỉnh cộng hưởng.
Hiện nay, nhiều Servo Drive tích hợp Bộ lọc Notch Thích ứng (Adaptive Notch Filter). Bộ lọc thích ứng này tự động theo dõi tần số cộng hưởng (thường thay đổi theo nhiệt độ và tải) và điều chỉnh tần số trung tâm theo thời gian thực, đảm bảo hiệu quả triệt tiêu cộng hưởng liên tục, nâng cao Khả năng chống nhiễu và độ ổn định của toàn bộ hệ thống servo.
3.2. Bộ lọc Thông Thấp (Low-Pass Filter) – Ổn định Hệ thống
Bộ lọc thông thấp (LPF) thực hiện nhiệm vụ làm mịn tín hiệu bằng cách loại bỏ các thành phần tần số cao hơn một tần số cắt xác định. LPF được áp dụng rộng rãi trong Servo Drive để loại bỏ nhiễu điện tử, nhiễu cảm biến, và các tần số chuyển mạch (PWM noise) phát sinh từ bộ khuếch đại công suất. LPF chủ yếu được đặt trong vòng mô-men xoắn (Current Loop) và vòng tốc độ (Velocity Loop) để ổn định đầu vào cho bộ điều khiển.
Tuy nhiên, việc sử dụng LPF luôn đi kèm với sự đánh đổi quan trọng: giảm băng thông điều khiển. LPF tạo ra độ trễ pha (Phase Lag) tỷ lệ nghịch với tần số cắt. Nếu tần số cắt của LPF được đặt quá thấp, độ trễ pha sẽ quá lớn, làm giảm biên độ pha (Phase Margin) của hệ thống, dẫn đến mất ổn định và kéo dài thời gian ổn định. Do đó, chiến lược tối ưu là:
- Sử dụng bộ lọc notch để xử lý các đỉnh cộng hưởng.
- Chỉ sử dụng LPF với tần số cắt cao nhất có thể (cao hơn băng thông điều khiển mục tiêu) để loại bỏ nhiễu còn sót lại, nhằm giữ vững tốc độ phản hồi nhanh và độ chính xác Encoder.
3.3. Bộ lọc Độ dốc Tần số (Torque/Velocity Filter)
Bộ lọc Độ dốc Tần số, hay còn gọi là bộ giới hạn Giật cục (Jerk Limiter) hoặc Bộ lọc S-Curve, là một nhóm các bộ lọc đầu vào được sử dụng để điều chỉnh tín hiệu lệnh chuyển động. Giật cục (Jerk) là đại lượng mô tả tốc độ thay đổi của gia tốc. Khi lệnh gia tốc thay đổi đột ngột (từ 0 lên tối đa), hệ thống sẽ tạo ra một cú sốc cơ học lớn.
Bộ lọc S-Curve giải quyết vấn đề này bằng cách làm mềm quá trình chuyển đổi gia tốc và giảm tốc. Thay vì thay đổi gia tốc theo hình vuông (đột ngột), nó thay đổi theo hình chữ ‘S’ (dốc từ từ).
Ứng dụng và lợi ích của Bộ lọc Độ dốc Tần số:
- Bảo vệ Cơ khí: Giảm thiểu ứng suất và mài mòn lên các bộ phận truyền động.
- Khử Rung chấn Cường độ Cao: Giảm rung động kích thích ban đầu do sự thay đổi gia tốc đột ngột.
- Cải thiện Chất lượng Bề mặt: Mang lại chuyển động mượt mà hơn, đặc biệt quan trọng trong các quy trình gia công hoặc in ấn tinh xảo.
Việc thiết lập bộ lọc độ dốc phù hợp là một sự cân bằng giữa tốc độ phản hồi nhanh (muốn thời gian chuyển động ngắn) và sự mượt mà cơ học (muốn Jerk thấp).
4. Quy trình Tối ưu hóa và Điều chỉnh Bộ lọc (Tuning Filters)
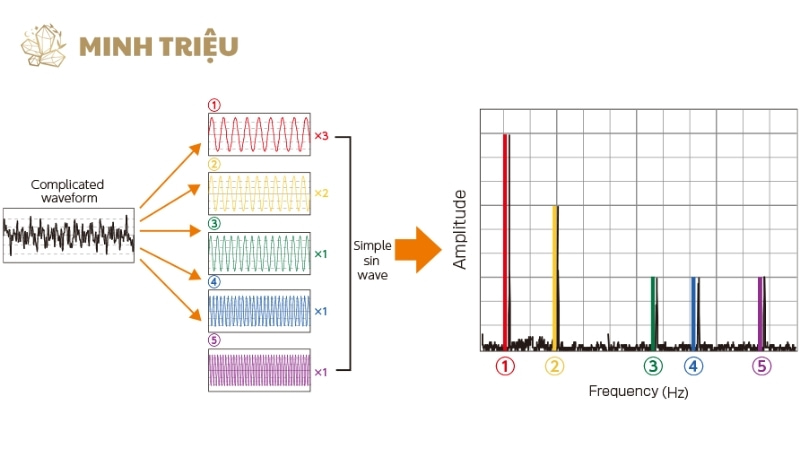
4.1. Phân tích Tần số Cộng hưởng (Sử dụng FFT)
Điều chỉnh bộ lọc không thể thực hiện hiệu quả nếu không xác định chính xác các tần số cộng hưởng của máy móc. Quy trình này đòi hỏi việc sử dụng Phân tích FFT (Fast Fourier Transform), một công cụ xử lý tín hiệu số có trong hầu hết các Servo Drive hiện đại. FFT cho phép kỹ sư chuyển đổi tín hiệu phản hồi (thường là mô-men xoắn hoặc tốc độ) từ miền thời gian sang miền tần số, nơi các đỉnh cộng hưởng trở nên rõ ràng.
Quy trình cơ bản của Phân tích FFT để tìm tần số cộng hưởng bao gồm:
- Bước 1 – Kích thích hệ thống: Gửi xung mô-men hoặc lệnh quét tần số (Swept Sine) vào động cơ servo để kích hoạt các tần số tự nhiên của cơ khí.
- Bước 2 – Thu thập dữ liệu: Thu tín hiệu phản hồi mô-men và tốc độ từ encoder để ghi nhận dữ liệu rung động của hệ thống.
- Bước 3 – Biến đổi FFT: Servo Drive hoặc phần mềm thực hiện FFT để chuyển dữ liệu theo thời gian sang miền tần số.
- Bước 4 – Xác định đỉnh cộng hưởng: Phân tích phổ tần số để tìm các đỉnh biên độ lớn nhằm xác định tần số cộng hưởng và mức độ của chúng.
- Bước 5 – Cài đặt bộ lọc: Dựa trên tần số đã xác định, thiết lập bộ lọc notch với tần số trung tâm phù hợp để triệt tiêu cộng hưởng hiệu quả.
Việc xác định chính xác các đỉnh này là cơ sở khoa học để cài đặt các bộ lọc notch mà không cần điều chỉnh thử và sai, đảm bảo tăng băng thông điều khiển an toàn.
4.2. Chiến lược Điều chỉnh Bộ lọc Notch
Sau khi xác định được các tần số cộng hưởng qua phân tích FFT, việc điều chỉnh bộ lọc notch phải được thực hiện theo một chiến lược rõ ràng để đạt hiệu quả tối đa mà không gây mất ổn định. Chiến lược này ưu tiên xử lý các đỉnh cộng hưởng có biên độ lớn nhất trước, vì chúng là yếu tố giới hạn chính cho độ lợi của vòng điều khiển.
Các bước chi tiết để tối ưu hóa bộ lọc notch:
- Xác định Tần số: Cài đặt tần số trung tâm của bộ lọc khớp với tần số đỉnh lớn nhất từ biểu đồ FFT.
- Thiết lập Độ sâu Ban đầu: Bắt đầu với độ sâu nhỏ (ví dụ: -6 dB) và tiến hành kiểm tra đáp ứng tần số.
- Tăng Độ sâu: Tăng độ sâu dần dần cho đến khi đỉnh cộng hưởng giảm xuống dưới mức chấp nhận được (hoặc đến khi hệ thống bắt đầu có dấu hiệu dịch chuyển pha quá mức).
- Điều chỉnh Độ rộng: Đặt độ rộng hẹp nhất có thể. Độ rộng lớn sẽ gây suy giảm năng lượng ở các tần số không cộng hưởng, làm giảm băng thông điều khiển tổng thể.
- Tái Kiểm tra: Sau khi điều chỉnh một bộ lọc, lặp lại phân tích FFT để xác nhận đỉnh cộng hưởng đã bị triệt tiêu và kiểm tra xem có đỉnh mới nào xuất hiện do dịch chuyển pha hay không.
Kỹ thuật “Xếp chồng Notch” (Stacking Notches) là cần thiết cho các hệ thống phức tạp có nhiều đỉnh cộng hưởng. Servo Drive hiện đại thường cung cấp từ 3 đến 5 bộ lọc notch độc lập để xử lý đồng thời nhiều tần số.
4.3. Tối ưu hóa Bộ lọc Thông Thấp và Độ dốc
Việc tối ưu hóa bộ lọc thông thấp (LPF) và Bộ lọc Độ dốc Tần số là bước cuối cùng trong quá trình điều chỉnh bộ lọc để tinh chỉnh phản ứng của hệ thống.
Tối ưu hóa LPF:
- Vị trí: LPF thường được đặt trên tín hiệu phản hồi tốc độ hoặc trong vòng mô-men xoắn để khử nhiễu điện tử.
- Tần số cắt: Tần số cắt nên được đặt cao hơn 1.5 đến 2 lần băng thông điều khiển đã đạt được (sau khi dùng notch filter). Điều này giúp loại bỏ nhiễu tần số rất cao mà không làm tăng đáng kể độ trễ pha tại tần số hoạt động của vòng điều khiển.
- Kiểm tra Tác động: Sau khi cài đặt LPF, cần kiểm tra đáp ứng bước (Step Response) để đảm bảo thời gian ổn định không bị kéo dài và lỗi theo dõi vẫn ở mức tối thiểu.
Tối ưu hóa Bộ lọc Độ dốc:
- Giới hạn Jerk: Giảm Giật cục (Jerk) đến mức thấp nhất có thể mà vẫn đáp ứng yêu cầu về thời gian chu kỳ máy. Jerk thấp giúp chuyển động mượt mà hơn và giảm ứng suất vật lý.
- Thời gian Chuyển động: Đặt giới hạn gia tốc và giảm tốc phù hợp để đảm bảo tốc độ phản hồi nhanh trong khi vẫn duy trì đường cong chuyển động S-Curve lý tưởng.
Lưu ý quan trọng khi điều chỉnh bộ lọc:
- Bắt đầu điều chỉnh bộ lọc sau khi đã điều chỉnh độ lợi PID ở mức ổn định cơ bản.
- Luôn kiểm tra độ chính xác Encoder và lỗi theo dõi sau mỗi lần thay đổi thông số bộ lọc.
- Các thông số bộ lọc thường là tĩnh; nếu cơ cấu cơ khí thường xuyên thay đổi (ví dụ: thay đổi tải trọng), nên cân nhắc sử dụng Bộ lọc Notch Thích ứng.
5. Tác động của Bộ lọc Kỹ thuật số lên Hiệu suất Sản xuất
5.1. Giảm Thời gian Ổn định (Settling Time) và Tăng Tốc độ
Một trong những lợi ích lớn nhất của việc điều chỉnh bộ lọc chính xác là khả năng tăng băng thông điều khiển của Servo Drive. Khi tần số cộng hưởng đã được triệt tiêu hiệu quả, kỹ sư có thể tăng độ lợi của vòng tốc độ và vị trí mà không gây rung lắc. Băng thông điều khiển cao hơn cho phép bộ điều khiển phản ứng nhanh hơn và mạnh mẽ hơn với bất kỳ sai số vị trí nào.
Tác động trực tiếp của tăng băng thông điều khiển là rút ngắn đáng kể thời gian ổn định. Thời gian ổn định là khoảng thời gian cần thiết để Động cơ servo đạt đến vị trí mục tiêu và duy trì trong phạm vi sai số cho phép. Việc giảm thời gian ổn định từ hàng chục mili giây xuống chỉ còn vài mili giây có thể tăng năng suất tổng thể của máy móc lên đến 20-50%, trực tiếp cải thiện lợi tức đầu tư (ROI). Bộ lọc kỹ thuật số đảm bảo hệ thống có được tốc độ phản hồi nhanh cần thiết để tối đa hóa thông lượng sản xuất.
5.2. Cải thiện Độ chính xác và Chất lượng Sản phẩm
Bộ lọc kỹ thuật số đóng vai trò thiết yếu trong việc duy trì và nâng cao độ chính xác Encoder, từ đó cải thiện chất lượng sản phẩm cuối cùng. Bằng cách khử rung chấn hiệu quả, bộ lọc đảm bảo rằng Động cơ servo hoạt động mượt mà và chính xác theo lệnh.
Rung chấn là nguyên nhân hàng đầu gây ra các khiếm khuyết vi mô trên sản phẩm, như các vết sóng trên bề mặt phôi gia công hoặc lỗi định vị trong in ấn. Bộ lọc notch loại bỏ các tần số gây rung lắc, giảm thiểu lỗi theo dõi và các dao động vi mô không mong muốn.
Ứng dụng thực tiễn của sự cải thiện độ chính xác:
- Gia công CNC: Triệt tiêu cộng hưởng giúp giảm rung động đầu cắt, dẫn đến bề mặt hoàn thiện mịn hơn và độ chính xác kích thước cao hơn.
- Thiết bị Bán dẫn: Đảm bảo Encoder servo định vị wafer với độ chính xác nanomet, điều kiện tiên quyết cho việc sản xuất chip hiện đại.
- Hệ thống Camera/Quét Laser: Khả năng chống nhiễu của bộ lọc giúp giữ cho tia laser hoặc cảm biến quang học ổn định tuyệt đối trong quá trình quét.

5.3. Tiết kiệm Chi phí Vòng đời (LCO) và Bảo trì
Mặc dù việc đầu tư vào Servo Drive cao cấp có công nghệ bộ lọc kỹ thuật số tiên tiến có thể làm tăng chi phí ban đầu, nhưng lợi ích về Chi phí Vòng đời (LCO) là rất lớn. Bộ lọc kỹ thuật số hoạt động như một cơ chế bảo vệ cơ khí và điện tử.
Việc khử rung chấn và giảm Giật cục giúp giảm thiểu ứng suất cơ học tác động lên toàn bộ cơ cấu truyền động. Ứng suất thấp hơn đồng nghĩa với việc:
- Kéo dài Tuổi thọ Linh kiện: Vòng bi, trục vít bi, khớp nối và hộp số có tuổi thọ cao hơn đáng kể do không phải chịu tải động quá mức.
- Giảm Chi phí Phụ tùng: Tần suất thay thế linh kiện giảm, trực tiếp giảm chi phí vận hành và bảo trì.
- Tăng Độ tin cậy: Giảm thời gian ngừng hoạt động ngoài kế hoạch (Downtime) do hỏng hóc cơ khí, đảm bảo hiệu suất sản xuất liên tục.
Tối ưu hóa bộ lọc là một chiến lược toàn diện, không chỉ dừng lại ở hiệu suất điều khiển mà còn mở rộng đến hiệu quả kinh tế và tính bền vững của hoạt động sản xuất.
6. Kết luận
Công nghệ bộ lọc kỹ thuật số trong Servo Drive là yếu tố then chốt giúp hệ thống servo vận hành ổn định ở băng thông cao, nhờ khả năng triệt tiêu cộng hưởng của bộ lọc notch và giảm nhiễu bằng bộ lọc thông thấp. Tương lai sẽ chứng kiến Servo Drive tích hợp AI, bộ lọc thích ứng và kỹ thuật học máy, cho phép tự học đặc tính cơ khí và tự điều chỉnh tham số theo thời gian thực. Bên cạnh đó, bộ lọc dựa trên mô hình toán học (Model-Based Filters) sẽ nâng cao khả năng chống nhiễu và độ chính xác phản hồi.