
Động cơ servo
Bộ Mã Hóa Quang Học và Từ Tính: So Sánh Chi Tiết Encoder Servo trong Sản Xuất Công Nghiệp
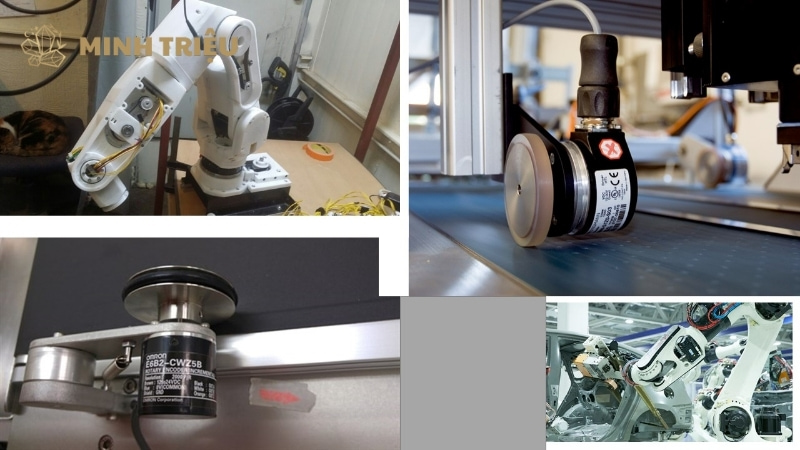
Trong bối cảnh công nghiệp 4.0, động cơ servo là nền tảng của các hệ thống tự động hóa chính xác, nhưng hiệu suất của chúng phụ thuộc lớn vào chất lượng cảm biến phản hồi vị trí – Servo Encoder. Hai công nghệ chính hiện nay là encoder quang và encoder từ, mỗi loại ảnh hưởng trực tiếp đến độ chính xác điều khiển, độ tin cậy và chi phí vận hành. Bài viết sẽ giúp làm rõ vai trò của encoder trong điều khiển vòng kín, phân tích nguyên lý hoạt động, ưu – nhược điểm của encoder quang và encoder từ
1. Vai trò thiết yếu của Encoder trong Hệ thống Servo
1.1. Encoder là gì và Vai trò Phản hồi Vị trí
Encoder servo định nghĩa một cảm biến điện cơ học, đóng vai trò then chốt trong việc cung cấp tín hiệu Phản hồi vị trí và tốc độ tức thời của trục động cơ cho bộ điều khiển. Bộ điều khiển chuyển động sử dụng dữ liệu phản hồi này để liên tục điều chỉnh dòng điện, đảm bảo Motor duy trì vị trí và tốc độ chính xác theo lệnh. Cốt lõi của chức năng Encoder là việc đảm bảo vòng điều khiển kín (Closed-loop control) hoạt động chính xác, cho phép hệ thống servo đáp ứng linh hoạt với các thay đổi tải trọng và nhiễu động bên ngoài.
Sự chính xác của Phản hồi vị trí trực tiếp quyết định hiệu suất động và tĩnh của hệ thống servo. Nếu Encoder cung cấp thông tin không chính xác hoặc chậm trễ, bộ điều khiển sẽ đưa ra tín hiệu điều chỉnh sai, dẫn đến lỗi theo dõi (tracking error), rung động cơ hoặc mất ổn định hệ thống. Do đó, Servo Encoder đóng vai trò là tiêu chuẩn đo lường cho mọi hành vi chuyển động, làm nền tảng cho Độ chính xác Encoder tổng thể của máy móc.
1.2. Phân loại cơ bản
Encoder được phân loại chủ yếu thành hai nhóm chính dựa trên phương pháp cung cấp dữ liệu vị trí.
- Encoder tương đối (Incremental): Encoder tương đối cung cấp tín hiệu xung (pulse signal) mỗi khi trục quay một lượng góc cố định. Loại Encoder tương đối này yêu cầu một điểm tham chiếu ban đầu (ví dụ: công tắc hành trình hoặc tín hiệu Z-pulse) để xác định vị trí tuyệt đối hiện tại của trục.
- Encoder tuyệt đối (Absolute): Encoder tuyệt đối cung cấp một mã kỹ thuật số duy nhất (Unique Digital Code) cho mỗi vị trí góc của trục. Đặc tính này cho phép bộ điều khiển xác định vị trí chính xác ngay lập tức khi bật nguồn, loại bỏ nhu cầu phải di chuyển về điểm gốc (Homing) sau khi mất điện.
Việc phân loại Encoder là cơ sở để xác định độ phức tạp của giao tiếp và quy trình khởi động hệ thống.

2. Bộ Mã Hóa Quang Học (Optical Encoder)
2.1. Nguyên lý hoạt động
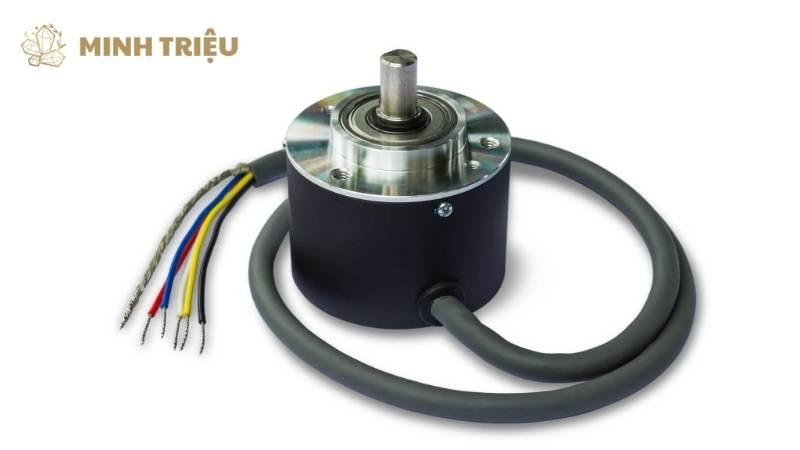
Bộ mã hóa quang học định nghĩa một cảm biến Cảm biến vị trí hoạt động dựa trên nguyên lý chặn và cho ánh sáng đi qua để tạo ra tín hiệu điện. Encoder quang sử dụng một đĩa chia vạch (code disc) làm bằng vật liệu trong suốt hoặc mờ đục, với các khe hở và vạch mờ được khắc chính xác theo chu vi.
Cơ chế này hoạt động khi một nguồn sáng LED (Light Emitting Diode) chiếu qua đĩa, và một mảng cảm biến quang điện (photodetectors) đọc các chuỗi ánh sáng và bóng tối đi qua. Các cảm biến quang điện sau đó chuyển đổi mẫu ánh sáng này thành tín hiệu điện tử (dạng xung đối với loại tương đối, hoặc mã nhị phân đối với loại tuyệt đối). Quá trình này đảm bảo sự chuyển đổi chính xác từ chuyển động cơ học sang thông tin số.
2.2. Ưu điểm nổi bật
Bộ mã hóa quang học được ưa chuộng trong các Ứng dụng công nghiệp đòi hỏi khắt khe nhất nhờ vào những ưu điểm vượt trội sau:
- Độ chính xác Encoder cao là lợi thế lớn nhất của công nghệ quang học, đạt được nhờ vào độ phân giải siêu cao (High Resolution) của đĩa chia vạch. Sự tinh xảo trong việc khắc các vạch trên đĩa quang cho phép thu được hàng triệu xung trên mỗi vòng quay, làm cho loại encoder này lý tưởng cho các ứng dụng cần định vị cực kỳ tinh tế, như máy công cụ CNC 5 trục.
- Tốc độ phản hồi nhanh cho phép hệ thống servo đạt được hiệu suất động tối ưu. Vì quá trình đọc tín hiệu chỉ liên quan đến sự chuyển đổi ánh sáng sang điện tử mà không có độ trễ vật lý, Encoder quang có thể hoạt động hiệu quả ở tốc độ vòng quay rất cao.
2.3. Nhược điểm và Thách thức
Mặc dù vượt trội về Độ chính xác Encoder, Bộ mã hóa quang học cũng phải đối mặt với các thách thức lớn liên quan đến độ bền và môi trường. Encoder quang đặc biệt nhạy cảm với bụi bẩn, dầu mỡ và độ rung.
Các hạt bụi nhỏ có thể làm tắc nghẽn đường đi của ánh sáng giữa LED và cảm biến quang, dẫn đến tín hiệu bị suy giảm hoặc mất xung. Điều này trực tiếp ảnh hưởng đến tính toàn vẹn của Phản hồi vị trí và có thể gây lỗi điều khiển nghiêm trọng. Thêm vào đó, quy trình sản xuất đĩa quang tinh xảo làm cho chi phí cao hơn và dễ bị hỏng hóc cơ học khi chịu va đập hoặc rung động mạnh. Đây là hạn chế cốt lõi khi triển khai chúng trong môi trường Ứng dụng công nghiệp khắc nghiệt.
3. Bộ Mã Hóa Từ Tính (Magnetic Encoder)
3.1. Nguyên lý hoạt động
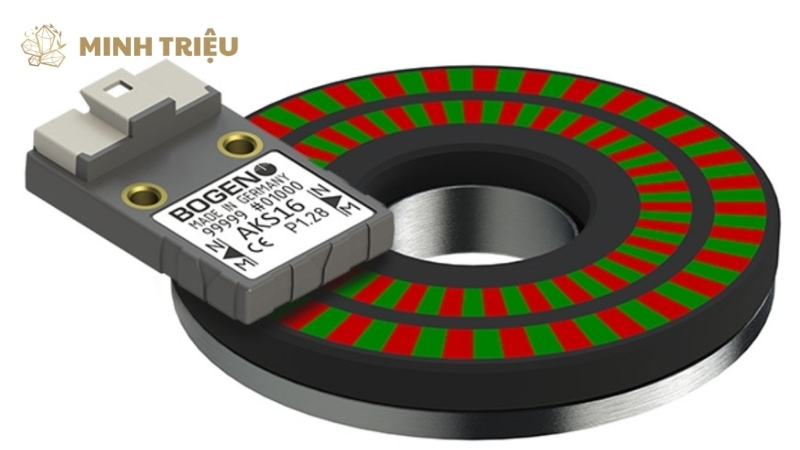
Bộ mã hóa từ tính định nghĩa một cảm biến Cảm biến vị trí sử dụng các định luật về từ trường để xác định vị trí góc của trục. Encoder từ sử dụng một đĩa từ tính (magnetic disc), nơi các cực Bắc và Nam được từ hóa xen kẽ xung quanh chu vi.
Cảm biến từ trường (thường là cảm biến Hall-effect, AMR – Anisotropic Magnetoresistive, hoặc GMR – Giant Magnetoresistive) được đặt gần đĩa. Khi đĩa quay, cường độ và hướng của từ trường thay đổi khi đi qua các cảm biến. Sự thay đổi này được chuyển đổi thành tín hiệu điện tử tỉ lệ với vị trí góc, cung cấp Phản hồi vị trí đáng tin cậy.
3.2. Ưu điểm nổi bật
Bộ mã hóa từ tính đã trở thành lựa chọn ưu tiên trong các môi trường khắc nghiệt nhờ các ưu điểm về độ bền và Khả năng chống nhiễu. Khả năng chống nhiễu và chịu môi trường khắc nghiệt là điểm mạnh vượt trội của Encoder từ, bởi vì nguyên lý hoạt động dựa trên từ trường không bị ảnh hưởng bởi bụi bẩn, dầu mỡ, độ ẩm hoặc sự ngưng tụ.
Các lợi ích từ tính chất này bao gồm:
- Độ bền cơ học: Encoder từ thường có cấu trúc chắc chắn hơn, giúp chúng chịu được rung động và sốc cơ học tốt hơn nhiều so với Encoder quang học.
- Kích thước nhỏ gọn: Công nghệ từ tính cho phép thiết kế cảm biến và đĩa nhỏ gọn hơn, lý tưởng cho các Động cơ servo có không gian lắp đặt hạn chế.
- Chi phí: Chi phí sản xuất thấp hơn so với Encoder quang học cùng cấp độ bảo vệ, đặc biệt là các loại cần Độ chính xác Encoder cao.
3.3. Nhược điểm và Thách thức
Mặc dù có độ bền cao, Bộ mã hóa từ tính vẫn có những hạn chế kỹ thuật cần được xem xét. Độ chính xác Encoder của Encoder từ có thể thấp hơn Encoder quang học độ phân giải siêu cao. Tuy nhiên, sự khác biệt này đang dần được thu hẹp nhờ sự tiến bộ của công nghệ cảm biến GMR.
Thách thức chính của Encoder từ là dễ bị nhiễu từ trường mạnh từ bên ngoài. Trong môi trường có các động cơ điện, cáp điện công suất lớn, hoặc máy hàn, từ trường nhiễu có thể làm sai lệch tín hiệu của cảm biến từ trường, dẫn đến lỗi trong Phản hồi vị trí. Các nhà sản xuất thường phải sử dụng lớp vỏ bảo vệ từ tính (magnetic shielding) để giảm thiểu rủi ro này.
4. So sánh Chi tiết: Quang học vs Từ tính trong Ứng dụng Servo
Việc lựa chọn Servo Encoder tối ưu đòi hỏi sự phân tích sâu sắc dựa trên các tiêu chí vận hành thực tế. Bộ mã hóa quang học và từ tính cung cấp sự cân bằng khác nhau giữa độ chính xác và độ bền môi trường.
| Tiêu chí so sánh | Bộ mã hóa quang học | Bộ mã hóa từ tính | Kết luận Ứng dụng công nghiệp |
| Nguyên lý | Ánh sáng và cảm biến quang | Từ trường và cảm biến từ | Quang học tinh tế hơn, Từ tính bền bỉ hơn |
| Độ chính xác Encoder | Rất cao (Độ phân giải siêu cao) | Cao (Đủ cho đa số ứng dụng), nhạy cảm với từ trường ngoài | Quang học cho các ứng dụng micromet |
| Khả năng chống nhiễu | Kém (Nhạy cảm với bụi, bẩn, hơi ẩm) | Tốt (Chống bụi, ẩm, dầu mỡ, rung động) | Từ tính cho môi trường nhà máy khắc nghiệt |
| Chi phí | Cao hơn đối với loại High Resolution | Thấp hơn và độ bền cao hơn | Từ tính mang lại TCO (Total Cost of Ownership) tốt hơn |
| Tốc độ tối đa | Rất cao (Lên đến 15,000 RPM) | Cao (Hạn chế bởi tần số đáp ứng của cảm biến từ) | Cả hai đều đáp ứng hầu hết Động cơ servo công nghiệp |
| Ứng dụng lý tưởng | Máy CNC, thiết bị y tế, Robot chính xác, Gia công bán dẫn | Máy công cụ, máy dệt, máy đóng gói, môi trường bẩn/khắc nghiệt |
5. Lựa chọn Encoder tối ưu cho Động cơ Servo Công nghiệp
Quyết định lựa chọn Servo Encoder cần phải dựa trên sự cân bằng cẩn thận giữa Độ chính xác Encoder mong muốn và tính chất của Môi trường hoạt động.
5.1. Yêu cầu Độ chính xác (Precision Requirement)
Khi nào cần Encoder quang và khi nào Encoder từ là đủ được xác định bởi mức độ chính xác mà ứng dụng đòi hỏi.
- Ứng dụng siêu chính xác (Cần Encoder quang): Các máy móc như thiết bị gia công bán dẫn (Semiconductor fabrication), máy quang học độ phân giải cao, hoặc máy CNC 5 trục cần Độ chính xác Encoder tuyệt đối. Encoder quang là sự lựa chọn không thể thay thế vì nó cung cấp độ phân giải góc tốt nhất.
- Ứng dụng chính xác tiêu chuẩn (Encoder từ là đủ): Các ứng dụng như băng tải tốc độ cao, máy đóng gói, hoặc các hệ thống xử lý vật liệu vẫn yêu cầu Phản hồi vị trí chính xác, nhưng Encoder từ hiện đại có thể cung cấp độ phân giải đủ cao (ví dụ: 17-20 bit) để đáp ứng các tiêu chuẩn này, đồng thời mang lại Khả năng chống nhiễu vượt trội.

5.2. Đánh giá Môi trường hoạt động
Môi trường hoạt động đóng vai trò quyết định trong việc lựa chọn loại Encoder. Khả năng chống chịu của Encoder từ trong môi trường bẩn, nhiệt độ cao, rung động đã được chứng minh.
Các yếu tố môi trường cần đánh giá:
- Chất gây ô nhiễm: Bụi kim loại, dầu cắt gọt, hơi nước. (Encoder từ ưu việt).
- Rung động: Máy ép, máy dệt tốc độ cao. (Encoder từ bền bỉ hơn).
- Từ trường: Gần cáp nguồn công suất lớn, các động cơ lớn. (Encoder quang tránh được nhiễu từ, nhưng Encoder từ cần lớp vỏ bảo vệ).
5.3. Xem xét Chi phí và Bảo trì
Chi phí vòng đời (LCO) của hệ thống servo bị ảnh hưởng đáng kể bởi loại Encoder được sử dụng. Phân tích Chi phí vòng đời bao gồm không chỉ chi phí mua sắm ban đầu mà còn cả chi phí thay thế và bảo trì.
- Chi phí ban đầu: Encoder quang độ phân giải cao có chi phí cao hơn.
- Chi phí bảo trì: Do độ nhạy của Encoder quang, chi phí thay thế và bảo trì có xu hướng tăng cao nếu lắp đặt trong môi trường không lý tưởng.
- Thời gian ngừng hoạt động (Downtime): Encoder từ mang lại độ tin cậy vận hành cao hơn trong các điều kiện khắc nghiệt, giảm thiểu thời gian ngừng hoạt động ngoài kế hoạch.
Do đó, mặc dù Bộ mã hóa từ tính có thể có Độ chính xác Encoder thấp hơn một chút, nhưng lợi thế về độ bền và Khả năng chống nhiễu lại mang lại giá trị kinh tế tổng thể cao hơn (LCO thấp hơn) cho nhiều Ứng dụng công nghiệp phổ thông.

6. Kết luận
Encoder quang và encoder từ đều quan trọng trong điều khiển chuyển động servo, và lựa chọn tối ưu phụ thuộc vào cân bằng giữa độ chính xác và khả năng chống nhiễu. Nhờ các cảm biến từ trường tiên tiến như GMR và TMR, encoder từ ngày càng thu hẹp khoảng cách về độ chính xác, trở thành lựa chọn ưu thế cho môi trường công nghiệp khắc nghiệt, nơi chi phí bảo trì và thời gian dừng máy cần được tối thiểu hóa. Tuy vậy, encoder quang vẫn là tiêu chuẩn trong các ứng dụng đòi hỏi độ chính xác cực cao. Sự tiến bộ song song của hai công nghệ này giúp kỹ sư dễ dàng chọn được giải pháp phản hồi vị trí phù hợp cho từng yêu cầu vận hành.