
Động cơ servo
So Sánh Động Cơ Servo và Động Cơ Bước: Lựa chọn nào Tối ưu cho Sản Xuất Công Nghiệp?
Động cơ servo và động cơ bước hình thành hai giải pháp truyền động điện tử phổ biến nhất, thực hiện nhiệm vụ điều khiển chính xác chuyển động và vị trí trong mọi lĩnh vực của sản xuất công nghiệp. Cả hai loại động cơ này đều có khả năng chuyển đổi xung điện từ bộ điều khiển thành chuyển động quay cơ học, cho phép máy móc thực hiện các tác vụ định vị phức tạp với độ chính xác nhất định.
Việc hiểu rõ những khác biệt cốt lõi về tốc độ, mô-men xoắn, chi phí, và độ tin cậy này trở nên quan trọng đối với bất kỳ kỹ sư nào nhằm mục đích tối ưu hóa hiệu suất servo và đảm bảo sự an toàn cũng như năng suất của dây chuyền sản xuất. Bài viết chuyên sâu này cam kết phân tích một cách có hệ thống so sánh động cơ servo và động cơ bước, cung cấp nền tảng kiến thức cần thiết cho việc lựa chọn thiết bị truyền động.
1. Động Cơ Bước (Stepper Motor): Nguyên lý Vòng Hở
1.1. Động cơ bước hoạt động theo nguyên tắc xung điện và bước quay (Step) như thế nào?
Động cơ bước thực hiện chức năng di chuyển một góc quay cơ học cố định, được gọi là bước quay (Step), tương ứng với mỗi xung điện mà nó nhận được từ bộ điều khiển. Cấu tạo cơ bản của động cơ bước bao gồm một rotor nam châm vĩnh cửu có nhiều răng và một stator được cuốn các cuộn dây điện từ, được bố trí một cách đối xứng.
Bộ điều khiển thực hiện hành động tuần tự cấp điện cho các cuộn dây stator; sự thay đổi liên tục của từ trường này tạo ra lực đẩy từ tính, buộc rotor phải căn chỉnh với từ trường mới. Sự di chuyển này được định lượng bởi Độ phân giải bước của động cơ, thường được nhà sản xuất ấn định ở mức $1.8^\circ$ hoặc $0.9^\circ$ trên mỗi bước đầy đủ, cho phép việc tính toán vị trí cuối cùng được thực hiện thông qua phép nhân đơn giản số lượng xung đã gửi.
1.2. Đặc tính Mô-men xoắn và Vòng Hở (Open Loop) của động cơ bước là gì?
Đặc tính Mô-men xoắn giữ (Holding Torque) của động cơ bước trình bày một ưu điểm đáng kể, là mô-men xoắn cực đại mà động cơ có thể chống lại khi trục đang đứng yên và các cuộn dây đang được cấp điện. Mô-men xoắn giữ này thực thi vai trò giữ vững vị trí của tải mà không cần phải tiêu thụ thêm năng lượng điều chỉnh liên tục.
Hệ thống không có khả năng để xác minh liệu động cơ có thực sự thực hiện bước quay như mong muốn hay không. Hậu quả là, khi tải vượt quá khả năng chịu đựng của động cơ, hoặc khi gia tốc quá nhanh, hệ thống sẽ xảy ra lỗi Mất bước (Step Loss) và dẫn đến sai lệch vị trí thực tế so với vị trí lý thuyết.
1.3. Ưu và nhược điểm chính của Động cơ bước
Động cơ bước trình bày một giải pháp chi phí thấp và có khả năng định vị tốt ở tốc độ thấp, làm cho nó trở nên lý tưởng cho các ứng dụng đơn giản và ngân sách hạn hẹp. Ưu điểm cốt lõi của loại động cơ này là sự đơn giản của nó: không cần Bộ mã hóa (Encoder), không cần điều chỉnh (Tuning) phức tạp, và mô-men xoắn giữ mạnh mẽ khi đứng yên.
Tuy nhiên, nhược điểm cố hữu của chúng phát sinh từ việc thiếu Phản hồi vị trí, dẫn đến nguy cơ cao về Mất bước trong điều kiện tải thay đổi hoặc quá tải, làm giảm độ tin cậy của hệ thống. Hơn nữa, hiệu suất của động cơ bước giảm nhanh chóng khi tốc độ tăng lên (thường trên 1000 RPM), kèm theo đó là hiện tượng rung động và sinh nhiệt lớn, gây hao phí năng lượng và có thể làm giảm tuổi thọ của động cơ.
2. Động Cơ Servo (Servo Motor): Nguyên lý Vòng Kín
2.1. Động cơ Servo hoạt động theo nguyên lý điều khiển Phản hồi (Feedback) như thế nào?
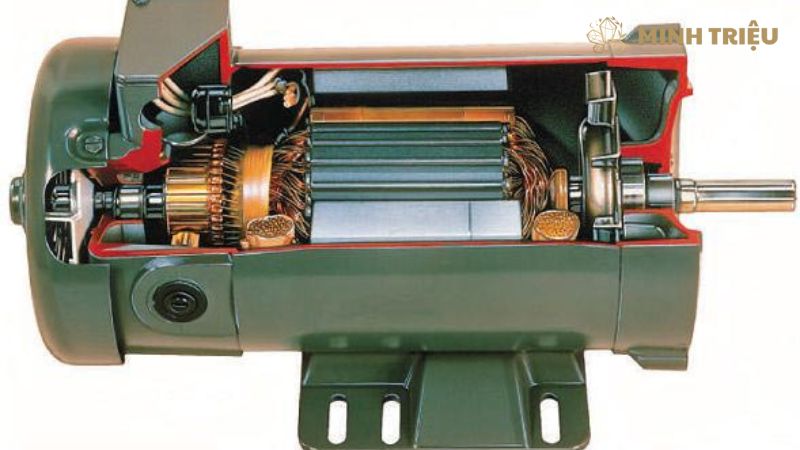
Động cơ Servo thực hiện chức năng duy trì độ chính xác và kiểm soát tốc độ bằng cách sử dụng nguyên lý Hệ thống điều khiển vòng kín (Closed-Loop Control) dựa trên Phản hồi vị trí (Feedback). Cấu hình cơ bản của hệ thống servo bao gồm một động cơ điện mạnh (thường là AC Brushless), một bộ điều khiển điện tử (Servo Drive), và một Bộ mã hóa (Encoder) chất lượng cao gắn trực tiếp vào trục động cơ.
Bộ mã hóa này thực thi nhiệm vụ đo lường vị trí và vận tốc thực tế của trục theo thời gian thực (real-time). Servo Drive thực hiện hành động so sánh liên tục giữa vị trí thực tế được Encoder báo cáo với vị trí mong muốn (Set Point), sau đó tính toán sai số. Dựa trên sai số này, Servo Drive điều chỉnh dòng điện cấp cho động cơ, buộc động cơ phải di chuyển chính xác đến vị trí yêu cầu, triệt tiêu gần như hoàn toàn mọi sai lệch.
2.2. Hệ thống Điều khiển Vòng Kín và Độ Chính Xác Cao của Servo
Hệ thống điều khiển vòng kín là yếu tố quyết định tạo nên độ chính xác và độ tin cậy vượt trội của động cơ servo so với động cơ bước. Việc sử dụng Bộ mã hóa (thường là loại tuyệt đối) cho phép Servo Drive luôn biết được tọa độ vị trí tuyệt đối của trục. Cơ chế vòng kín này thực thi vai trò bù trừ tự động cho mọi thay đổi bất ngờ của tải trọng, ma sát, hoặc các yếu tố bên ngoài khác.
Khi một lực cản đột ngột xuất hiện, Encoder lập tức báo cáo sai lệch vị trí cho Servo Drive, và bộ điều khiển sẽ ngay lập tức tăng dòng điện để duy trì vị trí đã đặt, đảm bảo rằng lỗi Mất bước là điều không thể xảy ra. Khả năng phản hồi thời gian thực này là bắt buộc đối với các ứng dụng robot công nghiệp và Máy CNC chính xác nơi độ chính xác lặp lại là tối quan trọng.
2.3. Ưu và nhược điểm chính của Động cơ Servo
Động cơ Servo trình bày một giải pháp công nghệ cao, cung cấp độ chính xác gần như tuyệt đối và động học vượt trội, làm cho nó trở thành tiêu chuẩn vàng trong sản xuất công nghiệp hiện đại. Ưu điểm lớn nhất của chúng bao gồm khả năng duy trì mô-men xoắn ổn định và cao cấp trong toàn bộ dải tốc độ hoạt động, và đạt được tốc độ quay rất cao (trên 3000 RPM) mà vẫn giữ được hiệu suất tối đa.
Tuy nhiên, thiết kế phức tạp hơn, đặc biệt là sự cần thiết của Bộ mã hóa (Encoder) và Servo Drive chuyên dụng, khiến chi phí đầu tư ban đầu cao hơn nhiều so với động cơ bước. Hơn nữa, việc tích hợp và điều chỉnh (Tuning) hệ thống servo đòi hỏi kiến thức chuyên môn sâu sắc để tối ưu hóa các tham số điều khiển PID nhằm đạt được hiệu suất trơn tru và tốc độ phản hồi nhanh.
3. Bảng So Sánh Kỹ thuật và Chi phí
3.1. Bảng so sánh chi tiết: Tiêu chí Kỹ thuật
Việc so sánh động cơ servo và động cơ bước qua các tiêu chí kỹ thuật giúp xác định rõ ràng môi trường hoạt động tối ưu của từng loại. Bảng so sánh Encoder này hệ thống hóa các khác biệt cơ bản nhất, cho thấy động cơ bước phù hợp với các ứng dụng tĩnh hoặc di chuyển chậm, trong khi động cơ servo thống trị lĩnh vực động học và tốc độ cao. Khả năng đảm bảo độ chính xác lặp lại của servo là lợi thế không thể bị đánh bại.
| Tiêu chí | Động cơ Bước (Stepper) | Động cơ Servo (Servo) |
|---|---|---|
| Cơ chế Điều khiển | Vòng hở (Open Loop) mặc định | Vòng kín (Closed-Loop Control) bắt buộc |
| Phản hồi Vị trí | Không có (Trừ loại Hybrid) | Bắt buộc (Thông qua Bộ mã hóa) |
| Rủi ro Sai lệch Vị trí | Rất cao (Mất bước) | Không xảy ra (Tự động bù sai số) |
| Tốc độ Tối đa | Thấp | Rất cao |
| Mô-men xoắn | Mạnh ở tốc độ thấp (Mô-men xoắn giữ), giảm nhanh theo tốc độ. | Cao và ổn định ở dải tốc độ rộng, mô-men xoắn quá tải (Overload Torque) tốt. |
| Độ chính xác | Phụ thuộc vào Độ phân giải bước, có thể bị ảnh hưởng bởi tải. | Độ chính xác lặp lại cao, được đảm bảo bởi Phản hồi vị trí. |
| Chi phí Hệ thống | Chi phí thấp ban đầu | Chi phí cao hơn đáng kể |
3.2. So sánh Tổng chi phí (Total Cost of Ownership)
Tổng chi phí sở hữu (TCO) trình bày một bức tranh toàn diện hơn so với chỉ chi phí mua sắm ban đầu, đặc biệt khi so sánh động cơ servo và động cơ bước. Mặc dù động cơ bước có chi phí mua sắm ban đầu thấp hơn rõ rệt (do thiếu Encoder và Drive đơn giản hơn), nhưng chi phí vận hành có thể tăng lên. Động cơ bước tiêu thụ dòng điện liên tục, ngay cả khi đứng yên (để duy trì Mô-men xoắn giữ), dẫn đến sinh nhiệt cao và lãng phí năng lượng.
Ngược lại, động cơ servo chỉ tiêu thụ dòng điện cần thiết để duy trì vị trí và khắc phục ma sát; mặc dù chi phí mua sắm cao, hiệu suất năng lượng cao hơn và độ tin cậy gần như tuyệt đối giúp giảm thiểu thời gian chết và chi phí bảo trì trong dài hạn. Trong các môi trường sản xuất công nghiệp yêu cầu hoạt động liên tục, sự đảm bảo vị trí của servo thường chứng minh giá trị kinh tế vượt trội.
Bảng: Ưu tiên Kỹ thuật và Chi phí
| Yêu cầu Ưu tiên | Động cơ Bước (Stepper) | Động cơ Servo (Servo) |
|---|---|---|
| Ngân sách/Chi phí | Ưu tiên Chi phí thấp ban đầu | Cần ngân sách cao hơn cho độ chính xác |
| Độ tin cậy Vị trí | Thấp (Có nguy cơ Mất bước) | Cao nhất (Hệ thống điều khiển vòng kín) |
| Gia tốc/Tốc độ cao | Yếu (Mất Mô-men xoắn) | Vượt trội (Động học mạnh mẽ) |
| Độ ồn/Rung | Cao (Cần Micro-stepping) | Rất thấp (Hoạt động trơn tru) |
4. Ứng dụng Thực tế trong Sản xuất Công nghiệp
4.1. Khi nào Động cơ Bước là Lựa chọn Tối ưu?
Động cơ bước vẫn duy trì vị thế là lựa chọn tối ưu cho nhiều ứng dụng trong sản xuất công nghiệp và các lĩnh vực khác, đặc biệt là khi yêu cầu tốc độ di chuyển chậm và chi phí là yếu tố ràng buộc chính. Các ứng dụng này thường có tải trọng nhẹ hoặc trung bình và không gặp phải nguy cơ quá tải thường xuyên. Ví dụ điển hình bao gồm các máy in 3D, thiết bị điều khiển quang học, các băng tải phân loại nhẹ, và các cơ cấu cấp liệu đơn giản trong máy móc.

Động cơ bước cung cấp đủ Độ phân giải cần thiết thông qua kỹ thuật Micro-stepping mà không làm tăng quá nhiều chi phí và sự phức tạp của hệ thống điều khiển vòng kín. Chúng chỉ hoạt động trong phạm vi an toàn, nơi Mất bước không dẫn đến hậu quả nghiêm trọng về sản phẩm hoặc an toàn máy móc.
4.2. Khi nào Động cơ Servo là Bắt buộc?
Động cơ Servo trở thành sự lựa chọn bắt buộc đối với các hệ thống yêu cầu độ chính xác tuyệt đối, tốc độ vận hành cao, và khả năng động học linh hoạt. Các ứng dụng này thường là cốt lõi của sản xuất công nghiệp 4.0, nơi mọi sai sót về vị trí đều dẫn đến sản phẩm bị loại bỏ hoặc hỏng hóc thiết bị.
4.3. Sự xuất hiện của Động cơ Bước Vòng Kín (Hybrid Stepper)
Sự xuất hiện của Động cơ Bước Vòng Kín (Hybrid Stepper) đã trình bày một giải pháp công nghệ lai, tìm kiếm sự cân bằng tối ưu giữa chi phí và độ tin cậy. Loại động cơ này thực hiện hành động kết hợp một động cơ bước tiêu chuẩn với một Bộ mã hóa (Encoder) cơ bản, từ đó chuyển đổi cơ chế điều khiển từ thuần Vòng hở sang Vòng kín đơn giản.
Hybrid Stepper giải quyết hiệu quả vấn đề cốt lõi của động cơ bước: Mất bước. Nếu động cơ bắt đầu mất đồng bộ, Encoder sẽ báo cáo sai lệch, và Drive sẽ cố gắng điều chỉnh vị trí trục. Mặc dù Hybrid Stepper không thể đạt được động học và tốc độ cao như servo truyền thống, chúng cung cấp độ tin cậy cao hơn nhiều so với động cơ bước tiêu chuẩn với mức chi phí thấp hơn đáng kể so với một hệ thống động cơ servo hoàn chỉnh.
5. Kết Luận
Quyết định lựa chọn cuối cùng giữa so sánh động cơ servo và động cơ bước phải được thực hiện thông qua một sự đánh giá khách quan về yêu cầu kỹ thuật và chi phí dài hạn của ứng dụng. Động cơ bước thực thi vai trò là lựa chọn kinh tế nhất cho các ứng dụng định vị đơn giản, tải trọng ổn định, và tốc độ thấp, nơi rủi ro Mất bước được chấp nhận hoặc có thể dễ dàng phục hồi. Ngược lại, Động cơ Servo là sự đầu tư bắt buộc cho các hệ thống phức tạp như Máy CNC chính xác và Robot công nghiệp, nơi độ chính xác lặp lại, tốc độ phản hồi, và khả năng chống lỗi là những yếu tố quyết định đến hiệu suất và chất lượng sản phẩm.