
Động cơ servo
So Sánh Các Loại Bộ Mã Hóa (Tuyệt Đối, Tương Đối) Cho Động Cơ Servo

Bộ mã hóa (Encoder) thực thi chức năng của cảm biến phản hồi, hình thành nên thành phần quan trọng nhất trong mọi hệ thống điều khiển vòng kín của động cơ servo. Thiết bị điện cơ này thực hiện nhiệm vụ chuyển đổi chính xác chuyển động quay hoặc tịnh tiến của trục động cơ thành chuỗi tín hiệu điện tử tương ứng, cho phép bộ điều khiển liên tục tiếp nhận phản hồi vị trí/tốc độ với độ trễ tối thiểu. Tầm quan trọng của bộ mã hóa nằm ở khả năng giám sát dữ liệu vị trí tức thời. Bài viết chuyên sâu này cam kết phân tích một cách có hệ thống sự so sánh các loại bộ mã hoá.
1. Bộ Mã Hóa Tương Đối (Incremental Encoder)
1.1. Encoder Tương đối hoạt động theo cơ chế đếm xung như thế nào?
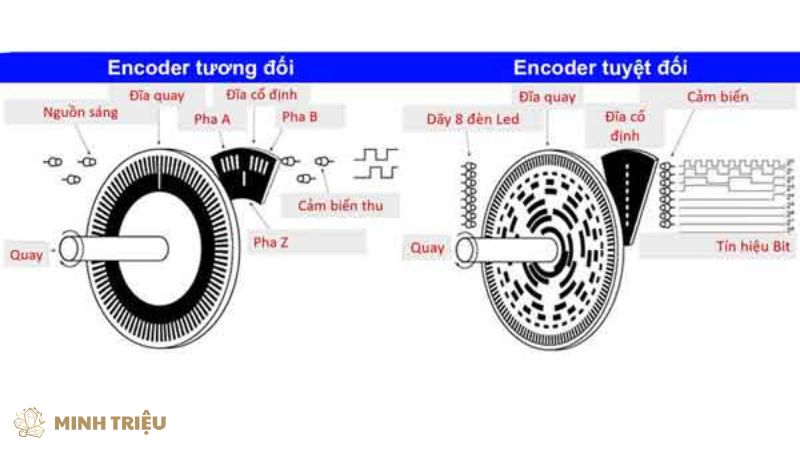
Encoder Tương đối thực hiện chức năng xác định vị trí tương đối và vận tốc bằng cách phát ra một chuỗi các xung điện liên tục, bắt đầu từ một điểm tham chiếu được xác định trước. Cơ chế cốt lõi của encoder type này liên quan đến một đĩa mã hóa đơn giản, được chế tạo bằng thủy tinh hoặc kim loại, chứa các rãnh xuyên sáng được phân bố đồng đều, kết hợp với một nguồn sáng (LED) và một dãy cảm biến quang điện.
Khi trục động cơ quay, các cảm biến ghi nhận sự chuyển đổi giữa vùng rãnh sáng và vùng chắn sáng, từ đó tạo ra các xung vuông tiêu chuẩn. Thông số PPR (Pulses Per Revolution) định lượng độ phân giải của cảm biến, đại diện cho tổng số chu kỳ tín hiệu được tạo ra cho một vòng quay cơ học đầy đủ của trục, qua đó xác định mức độ chi tiết mà bộ điều khiển có thể theo dõi chuyển động.
1.2. Tín hiệu Cầu phương (Quadrature) A/B/Z giúp xác định hướng quay ra sao?
Tín hiệu Cầu phương cung cấp phương tiện chính xác để bộ điều khiển có thể phân biệt hướng quay và tăng gấp đôi độ phân giải cảm biến bằng cách tạo ra hai chuỗi xung chính, được gọi là Pha A và Pha B. Hai tín hiệu này được thiết lập một cách cơ học và điện tử để lệch nhau một góc pha điện chính xác $90^\circ$ , tạo nên mối quan hệ cần thiết cho việc giải mã hướng.

Bộ điều khiển thực hiện hành động phân tích sự dẫn pha giữa Pha A và Pha B: nếu Pha A dẫn Pha B, hệ thống xác định chiều quay là thuận; ngược lại, nếu Pha B dẫn Pha A, chiều quay được xác định là nghịch. Ngoài hai pha chính, Kênh Z (Index Pulse) cung cấp một xung điện duy nhất trên mỗi vòng quay, đóng vai trò là điểm 0 tham chiếu hoặc điểm Homing cần thiết để thiết lập lại vị trí ban đầu của hệ thống.
1.3. Ưu và nhược điểm chính của Encoder Tương đối
Encoder Tương đối trình bày một giải pháp chi phí thấp và có tốc độ đáp ứng cao, làm cho nó trở nên lý tưởng cho các hệ thống cần ưu tiên điều khiển tốc độ hoặc các ứng dụng đơn giản. Tuy nhiên, nhược điểm cố hữu của chúng phát sinh từ nguyên tắc hoạt động dựa trên việc đếm xung liên tục, khiến chúng dễ bị tổn thương trước các sự kiện gián đoạn.
Bất kỳ sự kiện nào như nhiễu điện từ, lỗi truyền tín hiệu, hoặc đặc biệt là mất vị trí khi mất điện (Power Loss Issue) đều khiến bộ đếm xung trong bộ điều khiển bị sai lệch hoặc hoàn toàn bị xóa bỏ. Hậu quả là, hệ thống bắt buộc phải thực hiện lại Homing procedure (quy trình trở về vị trí gốc) mỗi lần khởi động lại, đây là một quá trình tốn thời gian và làm giảm hiệu suất hoạt động của máy móc trong sản xuất công nghiệp theo lô lớn.
2. Bộ Mã Hóa Tuyệt Đối (Absolute Encoder)
2.1. Encoder Tuyệt đối cung cấp vị trí góc duy nhất bằng cách nào?
Encoder Tuyệt đối thực hiện chức năng cung cấp một giá trị mã vị trí tuyệt đối duy nhất cho mỗi góc quay của trục, hoàn toàn loại bỏ sự cần thiết của Homing procedure. Cơ chế phức tạp này được xây dựng dựa trên một đĩa mã hóa có nhiều rãnh đồng tâm, mỗi rãnh tương ứng với một bit dữ liệu. Bộ cảm biến quang học đọc đồng thời tất cả các rãnh, tạo ra một từ mã số (Code Word) đại diện cho tọa độ góc hiện tại.
Để đảm bảo độ tin cậy và ngăn chặn lỗi đọc khi cảm biến nằm chính xác ở ranh giới giữa hai mã, Encoder Tuyệt đối sử dụng Mã Gray (Gray Code), một hệ thống mã hóa tuần tự đặc biệt. Mã Gray chỉ cho phép duy nhất một bit thay đổi giá trị giữa hai vị trí kế tiếp, đảm bảo rằng bộ điều khiển không bao giờ nhận được dữ liệu không xác định (ambiguous data) hoặc bị lỗi đa bit trong quá trình chuyển đổi vị trí.
2.2. Sự khác biệt giữa Single-Turn và Multi-Turn Encoder
Việc phân biệt Single-Turn và Multi-Turn trở nên cần thiết vì chúng phục vụ các yêu cầu về hành trình khác nhau trong sản xuất công nghiệp. Encoder Single-Turn thực hiện nhiệm vụ xác định chính xác vị trí tuyệt đối trong phạm vi một vòng quay duy nhất; tuy nhiên, nó không có khả năng đếm được số lượng vòng quay đầy đủ đã xảy ra. Ngược lại, Encoder Multi-Turn đạt được khả năng theo dõi số vòng quay bằng cách tích hợp thêm một hệ thống bánh răng giảm tốc cơ khí hoặc sử dụng một bộ đếm điện tử.
Khả năng này giúp Encoder Multi-Turn mở rộng phạm vi đo lường lên nhiều vòng quay, thậm chí hàng nghìn vòng, bảo toàn toàn bộ dữ liệu vị trí trong các ứng dụng có hành trình dài. Đây là công nghệ cốt lõi làm cho Encoder Multi-Turn trở thành thành phần bắt buộc đối với các ứng dụng robot công nghiệp và các máy móc lớn như cần trục gantry.
2.3. Ưu và nhược điểm chính của Encoder Tuyệt đối
Encoder Tuyệt đối trình bày một giải pháp vượt trội khi ưu tiên hàng đầu là độ tin cậy của dữ liệu vị trí và khả năng hoạt động ngay lập tức sau sự cố nguồn. Ưu điểm lớn nhất của chúng là khả năng giữ vị trí tuyệt đối sau bất kỳ sự cố mất điện nào, cho phép máy móc phục hồi hoạt động ngay lập tức mà không cần Homing procedure, giảm thiểu đáng kể thời gian chết.
Tuy nhiên, thiết kế phức tạp hơn, đặc biệt là trong phiên bản Encoder Multi-Turn với cơ cấu đếm vòng, khiến chi phí đầu tư ban đầu cao hơn nhiều so với loại tương đối. Hơn nữa, việc truyền tải dữ liệu mã hóa đa bit yêu cầu các chuẩn Truyền thông kỹ thuật số encoder chuyên biệt, làm tăng sự phức tạp trong việc tích hợp giao diện so với các tín hiệu xung A/B đơn giản của loại tương đối.
3. So Sánh và Tiêu Chí Lựa Chọn Ứng Dụng
3.1. Bảng so sánh chi tiết: Tương đối vs. Tuyệt đối
Việc lựa chọn giữa Encoder Tương đối và Encoder Tuyệt đối đòi hỏi một sự đánh giá khách quan về yêu cầu độ chính xác, môi trường vận hành, và chấp nhận rủi ro mất vị trí của hệ thống động cơ servo. Bảng so sánh Encoder này hệ thống hóa các khác biệt cơ bản nhất, cho thấy Encoder Tương đối là cảm biến đếm sự kiện, trong khi Encoder Tuyệt đối là cảm biến đọc tọa độ. Khả năng tự động thiết lập lại vị trí tuyệt đối của loại tuyệt đối là một lợi thế không thể phủ nhận so với sự cần thiết bắt buộc phải thực hiện Homing procedure của loại tương đối.
Bảng 1: So sánh bộ mã hoá tương đối và tuyệt đối
| Tiêu chí So Sánh | Bộ Mã Hóa Tương đối (Incremental) | Bộ Mã Hóa Tuyệt đối (Absolute) |
|---|---|---|
| Dữ liệu Phản hồi | Vị trí tương đối (Xung đếm từ điểm 0) | Vị trí tuyệt đối (Code Word duy nhất) |
| Phục hồi sau Mất điện | Mất vị trí hoàn toàn; yêu cầu Homing procedure. | Giữ vị trí nhờ Mã Gray và cơ cấu Multi-Turn; phục hồi tức thời. |
| Độ phức tạp Thiết kế | Đơn giản hơn; sử dụng đĩa có 1 rãnh. | Phức tạp hơn; đĩa mã hóa nhiều rãnh hoặc cơ cấu bánh răng. |
| Giao diện Tín hiệu | Tín hiệu Cầu phương (A/B/Z – Xung). | Truyền thông kỹ thuật số encoder (Serial: EnDat, BiSS). |
| Giá thành | Chi phí thấp. | Chi phí cao hơn. |
| Ứng dụng chính | Điều khiển tốc độ phản hồi, định vị đơn giản. | Robot công nghiệp, Máy CNC chính xác, Gantry. |
3.2. Lựa chọn Encoder Tuyệt đối cho Máy CNC và Robot
Encoder Tuyệt đối trở thành sự lựa chọn bắt buộc đối với các hệ thống Máy CNC chính xác và Robot công nghiệp phức tạp, nơi sự an toàn và độ chính xác lặp lại của từng trục phải được đảm bảo không bị gián đoạn. Trong các ứng dụng đa trục, như một cánh tay Robot công nghiệp với sáu hoặc nhiều khớp quay, việc mất vị trí của bất kỳ trục nào có thể dẫn đến một sự cố thảm khốc khi khởi động lại.
Bộ mã hóa tuyệt đối loại Multi-Turn giải quyết vấn đề này một cách hiệu quả bằng cách liên tục lưu trữ vị trí tuyệt đối và số vòng quay đã thực hiện. Khả năng phục hồi hoạt động ngay lập tức sau khi nhấn nút dừng khẩn cấp (E-Stop) mà không cần di chuyển về điểm gốc giúp tiết kiệm thời gian, tăng năng suất, và đảm bảo sự toàn vẹn của dụng cụ cắt, qua đó tối ưu hóa hiệu suất servo trong các quy trình sản xuất công nghiệp đòi hỏi khắt khe nhất.
3.3. Khi nào Encoder Tương đối vẫn là lựa chọn tối ưu?
Encoder Tương đối duy trì ưu thế vượt trội trong các tình huống mà yêu cầu chính của hệ thống động cơ servo xoay quanh việc kiểm soát tốc độ đáp ứng và động lực học, thay vì định vị chính xác tuyệt đối. Các ứng dụng như điều khiển tốc độ quay của trục chính (spindle) hoặc điều chỉnh tốc độ băng tải thường chỉ cần đo lường sự thay đổi vị trí tương đối và tốc độ.
Do chi phí thấp hơn và mạch điện đơn giản hơn, Encoder Tương đối là giải pháp kinh tế nhất cho các nhiệm vụ này. Hơn nữa, nếu thiết kế máy cho phép một Homing procedure đơn giản, nhanh chóng, hoặc nếu vị trí 0 có thể được xác định bằng các công tắc giới hạn cơ học, thì việc sử dụng loại tương đối vẫn là quyết định tối ưu về mặt chi phí và hiệu suất kỹ thuật.
4. Giao diện Truyền thông (Interface)
4.1. Các chuẩn tín hiệu Digital/Analog cơ bản
Encoder Tương đối thường truyền tải dữ liệu phản hồi thời gian thực thông qua các giao diện điện áp đơn giản, phổ biến nhất là đầu ra Push-Pull (Totem-Pole) hoặc Open Collector. Tuy nhiên, để đáp ứng nhu cầu truyền tín hiệu xung tốc độ cao qua khoảng cách xa trong môi trường sản xuất công nghiệp nhiều nhiễu, chuẩn Line Driver (RS-422) được khuyến nghị sử dụng.
Line Driver thực hiện việc truyền tải Tín hiệu Cầu phương (A/B) dưới dạng cặp tín hiệu vi sai (A và $\bar{A}$), một phương pháp điện tử tối ưu hóa để loại bỏ nhiễu điện từ phổ biến trong nhà máy. Mặc dù các tín hiệu xung này hiệu quả cho loại tương đối, chúng không đủ khả năng để xử lý lượng dữ liệu đa bit phức tạp và yêu cầu về chẩn đoán của Encoder Tuyệt đối.
4.2. Giao tiếp Bus: Truyền thông Kỹ thuật số Hiện đại cho Encoder Tuyệt đối
Truyền thông kỹ thuật số encoder đại diện cho bước tiến hóa cần thiết để tích hợp Encoder Tuyệt đối vào các hệ thống tự động hóa phức tạp, thay thế các đầu ra song song tốn kém và cồng kềnh. Các giao thức Giao tiếp Bus hiện đại này cung cấp kênh truyền thông hai chiều (bidirectional), không chỉ chuyển dữ liệu vị trí mà còn cho phép bộ điều khiển truy xuất thông tin chẩn đoán nâng cao như nhiệt độ cảm biến, chu kỳ hoạt động và lỗi nội bộ, biến chúng thành Encoder thông minh.
Bảng 2: Các Chuẩn Giao tiếp Kỹ thuật số Chính
| Giao thức | Loại Truyền thông | Tính năng Nổi bật | Ứng dụng Điển hình |
|---|---|---|---|
| EnDat | Serial Đồng bộ, Bidirectional | Chuẩn mực trong ngành; Cung cấp vị trí tuyệt đối, chẩn đoán chuyên sâu, và dữ liệu tham số encoder. | Máy CNC chính xác (Trục chính, bàn xoay), Dụng cụ đo lường cao cấp. |
| BiSS-C | Serial Đồng bộ, Bidirectional, Mã mở | Tốc độ truyền dữ liệu cực cao ; Độ trễ thấp, được ưa chuộng cho các ứng dụng động học. | Máy in công nghiệp, Hệ thống robot tốc độ cao. |
| EtherCAT Encoder | Fieldbus Protocol (Ethernet) | Phản hồi thời gian thực thông qua FSoE (Functional Safety over EtherCAT); Đồng bộ hóa nhiều trục vượt trội. | Robot công nghiệp đa trục, Máy móc đóng gói tốc độ cao. |
| PROFIBUS/PROFINET | Fieldbus Protocol (Công nghiệp) | Tích hợp sâu rộng với kiến trúc PLC/DCS hiện có; Lựa chọn phổ biến cho các ứng dụng tự động hóa quy mô lớn. | Dây chuyền sản xuất lớn, Quản lý tài sản nhà máy. |
5. Kết Luận
Bài viết này đã so sánh các loại bộ mã hóa, duy trì sự chính xác và kiểm soát của động cơ servo trong mọi khía cạnh của sản xuất công nghiệp. Quyết định lựa chọn giữa Encoder Tương đối và Encoder Tuyệt đối cần được cân nhắc dựa trên yêu cầu nghiêm ngặt của ứng dụng: Encoder Tương đối là lựa chọn kinh tế cho việc kiểm soát tốc độ phản hồi nơi Homing procedure có thể chấp nhận được, trong khi Encoder Tuyệt đối là sự đầu tư bắt buộc cho các hệ thống yêu cầu độ tin cậy tuyệt đối về vị trí tuyệt đối và khả năng chống lỗi mất điện.