
Động cơ servo
Lịch sử phát triển của động cơ servo và Tác động tới Sản xuất công nghiệp

Sự phát triển của động cơ servo từ cơ chế cơ khí đến hệ thống Vòng lặp kín kỹ thuật số đã biến dây chuyền thủ công thành các hệ thống Robotics và CNC tinh vi. Bài viết phân tích các cột mốc lịch sử, công nghệ AC/DC servo, Encoder, và Vòng lặp kín, làm rõ cách servo nâng cao Thông lượng, chất lượng sản xuất và thúc đẩy tự động hóa trong Công nghiệp 4.0. Bài viết này sẽ trình bày một phân tích toàn diện về Lịch sử phát triển của động cơ servo, nó tập trung vào việc phác thảo những cột mốc then chốt và sự chuyển đổi công nghệ đã làm nên vị thế của servo ngày nay.
1. Khởi nguồn của Kiểm soát Chuyển động Chính xác
1.1. Định nghĩa Sơ khai và Tầm quan trọng của Động cơ servo
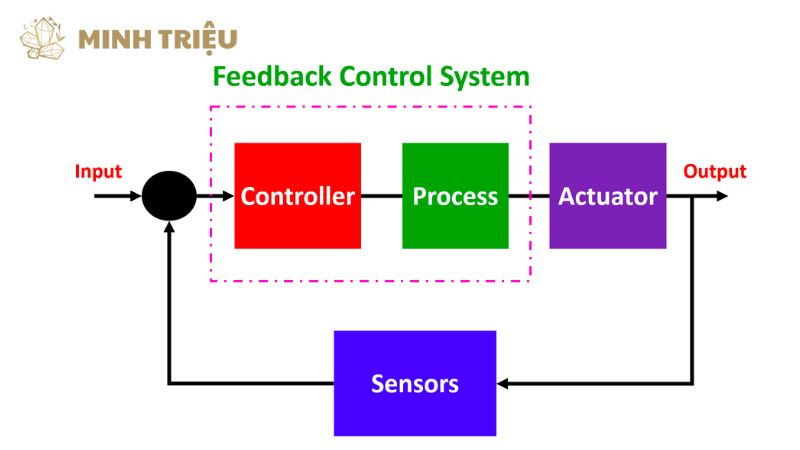
Động cơ servo là một hệ thống truyền động tiên tiến, nó chuyên biệt hóa trong việc thực thi các lệnh điều khiển vị trí, tốc độ, và lực (mô-men xoắn) một cách nhanh chóng và chính xác. Khác biệt cơ bản nằm ở nguyên lý Vòng lặp kín (Closed-Loop), nó sử dụng bộ phản hồi (Encoder) để liên tục đo lường Vị trí thực tế và so sánh với Vị trí đặt trước, từ đó tạo ra lệnh điều chỉnh tức thời.
Trước kỷ nguyên servo điện, các hệ thống sản xuất công nghiệp phải đối mặt với giới hạn về độ chính xác và tốc độ Vận tốc do sự phụ thuộc vào các cơ cấu điều khiển cơ khí hoặc Động cơ DC và khí nén thông thường, chúng hoạt động theo Vòng lặp hở (Open-Loop) và dễ bị ảnh hưởng bởi Tải trọng hoặc ma sát. Việc Động cơ servo được tích hợp vào Sản xuất công nghiệp đã tạo ra một bước nhảy vọt về năng suất và độ tin cậy.
1.2. Khái niệm Tiền đề: Hệ thống điều khiển phản hồi (Feedback Control)
Ý tưởng về Hệ thống điều khiển phản hồi có nguồn gốc từ những phát minh cơ khí ban sơ, nó khởi đầu bằng cơ chế điều tốc ly tâm (Centrifugal Governor) được James Watt phát triển vào năm 1788 để duy trì tốc độ hơi nước của động cơ. Mặc dù bộ điều tốc này là cơ khí và không phải là servo theo nghĩa hiện đại, nhưng nó đã thiết lập nền tảng lý thuyết cốt lõi là đo lường đầu ra, so sánh với tín hiệu mong muốn, và thực hiện hành động điều chỉnh.
Nguyên lý này đã trở thành khuôn mẫu cho toàn bộ lĩnh vực điều khiển tự động. Kể từ đó, việc áp dụng toán học vào kỹ thuật điều khiển đã phát triển thành Lý thuyết Điều khiển (Control Theory), nó cung cấp các công cụ để thiết kế các hệ thống Vòng lặp kín phức tạp, bao gồm cả Động cơ servo hiện đại, đảm bảo Thời gian đáp ứng tối ưu.
2. Giai đoạn Khởi đầu (1940s-1960s): Sự ra đời của DC Servo và Ứng dụng Quốc phòng
2.1. Nhu cầu thúc đẩy từ Chiến tranh và Không gian
Sự phát triển ban đầu của công nghệ servo đã được thúc đẩy mạnh mẽ bởi nhu cầu quân sự và hàng không trong thời kỳ Thế chiến II. Các ứng dụng như điều khiển Radar và hệ thống lái tự động của tên lửa đòi hỏi các cơ chế truyền động có khả năng định vị Vị trí thực tế của mục tiêu với độ chính xác cao mà con người không thể thực hiện được.
Servo thời kỳ này thường là các hệ thống cơ điện tử kết hợp giữa bộ khuếch đại (Amplifier) và Động cơ DC công suất nhỏ, chúng được thiết kế để đảm bảo đầu ra khớp với lệnh đầu vào từ máy tính analog. Chính những yêu cầu khắc nghiệt về độ tin cậy và Thời gian đáp ứng trong quân sự đã giúp công nghệ servo chuyển mình từ lý thuyết thành thực tiễn.
2.2. Sự thống trị của DC Servo (Động cơ Điện một chiều)
DC Servo là loại servo điện đầu tiên trở nên phổ biến trong các ứng dụng công nghiệp và quân sự, nó dựa trên nền tảng của Động cơ DC chổi than. Đặc điểm chính của DC Servo là cấu tạo đơn giản và khả năng cung cấp Mô-men xoắn khởi động cao, lý tưởng cho các ứng dụng định vị tải nhẹ và trung bình.
Các hệ thống này thường sử dụng potentiometer (biến trở) hoặc máy phát tốc (tachometer) để thực hiện chức năng phản hồi vị trí và tốc độ, nó duy trì nguyên lý Vòng lặp kín. Tuy nhiên, nhược điểm cố hữu của DC Servo là cần bảo trì thường xuyên do sự mài mòn của chổi than và cổ góp, nó gây ra giới hạn về Vận tốc tối đa và tuổi thọ hoạt động. Điều này đã thúc đẩy việc tìm kiếm các giải pháp servo bền bỉ hơn.

2.3. Khởi đầu của Máy CNC (Computer Numerical Control)
Bước đột phá lớn nhất đánh dấu sự tích hợp servo vào Sản xuất công nghiệp là sự phát minh ra Máy CNC (Computer Numerical Control) vào những năm 1950 tại MIT. Máy CNC đầu tiên sử dụng DC Servo để điều khiển chuyển động của các trục máy (X, Y, Z), nó cho phép gia công các chi tiết kim loại có hình dạng phức tạp và độ chính xác lặp lại cao.
Việc áp dụng Động cơ servo trong Máy CNC đã chứng minh rằng Hệ thống điều khiển phản hồi có thể vượt qua giới hạn của người vận hành, nó mở ra kỷ nguyên của gia công tự động. Sự thành công của Máy CNC đã tạo ra nhu cầu thị trường khổng lồ, thúc đẩy các nhà sản xuất đầu tư vào việc nghiên cứu và phát triển các hệ thống servo mạnh mẽ và đáng tin cậy hơn.
3. Giai đoạn Chuyển đổi (1970s-1980s): Công nghệ AC Servo và Động cơ không chổi than
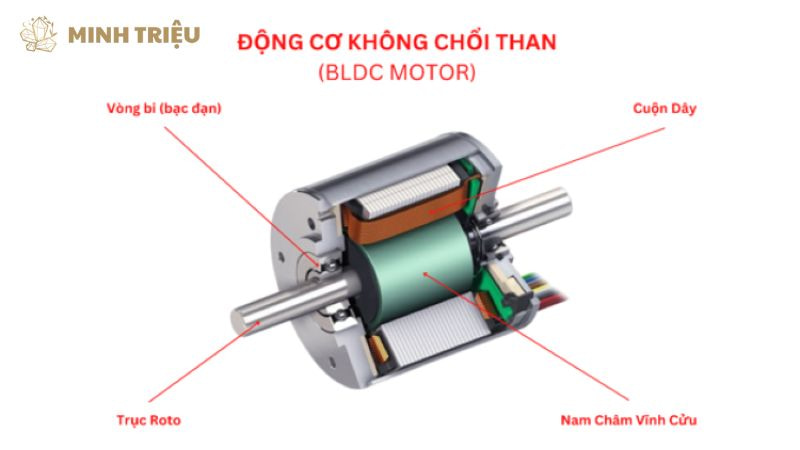
3.1. Sự xuất hiện của Động cơ không chổi than (Brushless Motor)
Thập niên 1970 và 1980 chứng kiến một cuộc cách mạng trong thiết kế động cơ với sự ra đời của Động cơ không chổi than (Brushless Motor), nó khắc phục triệt để các hạn chế của DC Servo chổi than. Động cơ không chổi than thực hiện chức năng chuyển mạch (commutation) bằng điện tử thay vì cơ khí (chổi than), nó loại bỏ ma sát và tia lửa điện.
Kết quả là một động cơ cung cấp độ bền vượt trội, khả năng đạt Vận tốc tối đa cao hơn nhiều (thường trên 6000 RPM), và giảm thiểu nhu cầu Bảo trì dự phòng.
3.2. Sự trỗi dậy của AC Servo (Động cơ Điện xoay chiều)
AC Servo trở thành tiêu chuẩn mới trong Sản xuất công nghiệp nhờ sự kết hợp giữa Động cơ không chổi than và bộ điều khiển (Drive) kỹ thuật số mạnh mẽ hơn. AC Servo có khả năng cung cấp Mô-men xoắn liên tục lớn hơn và mật độ công suất cao, nó đáp ứng hoàn hảo cho các ứng dụng Tải trọng nặng và yêu cầu chu kỳ làm việc 24/7.
Thành tựu lớn nhất là việc áp dụng Điều khiển Vector (Field-Oriented Control – FOC) bởi bộ điều khiển, nó cho phép kiểm soát Mô-men xoắn một cách độc lập với tốc độ, mang lại khả năng điều khiển động học tuyệt vời. Sự kết hợp này đã làm giảm đáng kể Thời gian đáp ứng của hệ thống so với các thế hệ trước.
3.3. Hoàn thiện Vòng lặp kín với Encoder quang học và Độ phân giải cao
Sự tiến bộ của các bộ phận phản hồi là yếu tố cốt lõi đảm bảo sự ưu việt của AC Servo. Encoder quang học (Optical Encoder) trở nên phổ biến, chúng cung cấp độ phân giải cao hơn nhiều (ví dụ: hàng nghìn xung trên mỗi vòng quay) so với potentiometer cũ. Encoder có vai trò là “mắt” của Vòng lặp kín, nó đo lường Vị trí thực tế với độ chính xác vi mô và truyền tải dữ liệu này về bộ điều khiển.
Hệ thống Vòng lặp kín hiện đại sử dụng thông tin này để tính toán sai số vị trí với độ nhạy cao, từ đó thực hiện các hành động điều chỉnh Mô-men xoắn tức thời, đảm bảo độ chính xác lặp lại gần như hoàn hảo.
4. Giai đoạn Hiện đại hóa (1990s-Nay): Servo Kỹ thuật số và Chuyển động Cao cấp
4.1. Sự bùng nổ của Servo Kỹ thuật số và Giao tiếp Mạng
Thập niên 1990 đã mở ra kỷ nguyên của Servo Kỹ thuật số, nó chuyển đổi hoàn toàn các thuật toán điều khiển từ analog sang xử lý kỹ thuật số bằng chip DSP (Digital Signal Processor). Bộ điều khiển kỹ thuật số có khả năng xử lý dữ liệu từ Encoder với tốc độ cực nhanh, cho phép các vòng điều khiển (Vòng lặp kín) đạt đến tần số cập nhật cao hơn (thường là hàng kHz), từ đó rút ngắn Thời gian đáp ứng tổng thể của hệ thống.
Đồng thời, sự phát triển của các giao thức Giao tiếp Mạng công nghiệp tốc độ cao (như SERCOS, sau này là EtherCAT) đã cho phép hàng chục trục Động cơ servo được kết nối và đồng bộ hóa chuyển động (Motion Synchronization) trong thời gian thực, tạo ra các hệ thống Robotics và Máy CNC phức tạp nhất.

4.2. Sự xuất hiện của Servo Tuyến tính (Linear Servo) và Direct Drive
Thách thức về độ chính xác và Vận tốc trong các ngành công nghiệp đòi hỏi khắt khe (bán dẫn, y tế) đã dẫn đến sự phát triển của Servo Tuyến tính và Direct Drive. Servo Tuyến tính hoạt động dựa trên nguyên lý động cơ điện từ mở, nó chuyển đổi năng lượng điện thành chuyển động thẳng trực tiếp mà không cần sử dụng bất kỳ cơ cấu cơ khí trung gian nào như vít me bi hay đai răng.
Điều này giúp loại bỏ ma sát, độ rơ (backlash), và giảm thiểu Bảo trì dự phòng, mang lại gia tốc và Vận tốc cực cao. Tương tự, Direct Drive là động cơ quay loại bỏ Hộp số truyền thống, nó tăng cường độ cứng vững cơ khí (Mechanical Rigidity) của hệ thống, lý tưởng cho các ứng dụng cần Mô-men xoắn lớn ở tốc độ thấp.
5. Vai trò Cách mạng của Động cơ servo trong sản xuất công nghiệp
5.1. Robotics và Sự dịch chuyển của Lao động
Động cơ servo là công nghệ nền tảng khuếch đại khả năng của Robotics công nghiệp. Mỗi khớp robot hiện đại (Robot 6 trục) được điều khiển bởi một Động cơ servo độc lập, nó đảm bảo Vị trí thực tế của đầu cuối robot đạt được độ chính xác vi mô.
Sự phát triển này đã cho phép robot thực hiện các nhiệm vụ lắp ráp, hàn, và đóng gói phức tạp vốn trước đây phải dựa vào lao động thủ công hoặc các cơ cấu chấp hành thủy lực/khí nén kém chính xác. Servo đã biến Robotics thành công cụ linh hoạt nhất trong Sản xuất công nghiệp, mở đường cho sự dịch chuyển lao động sang các vai trò giám sát và lập trình.
5.2. Tác động đến Thông lượng và Chất lượng Sản phẩm
Động cơ servo đã giải quyết bài toán về Thông lượng và chất lượng sản phẩm trong Sản xuất công nghiệp bằng cách cung cấp tốc độ và độ chính xác lặp lại. Trong các ứng dụng như máy in, máy cắt, hoặc thiết bị đóng gói tốc độ cao, servo đảm bảo sự đồng bộ chuyển động hoàn hảo (ví dụ: cắt vật liệu đang chạy – Flying Shear), nó cho phép Vận tốc sản xuất đạt được mức tối đa.
Độ chính xác cao của Vòng lặp kín giúp giảm thiểu lãng phí vật liệu và tỷ lệ sản phẩm lỗi (scrap rate), dẫn đến hiệu quả chi phí và nâng cao chất lượng tổng thể của sản phẩm.

6. Giai đoạn Tương lai: Công nghiệp 4.0 và Servo Thông minh
6.1. Sự hội nhập với Công nghiệp 4.0 và Phân tích Dữ liệu
Động cơ servo hiện đại đã trở thành một thiết bị biên (Edge Device) thông minh, nó hội nhập sâu rộng vào chiến lược Công nghiệp 4.0. Các bộ điều khiển có khả năng thu thập một lượng lớn dữ liệu hoạt động theo thời gian thực (từ Encoder, cảm biến nhiệt độ, dòng điện), và truyền tải chúng qua các giao thức Giao tiếp Mạng tốc độ cao (ví dụ: OPC UA).
Việc phân tích dữ liệu này đã cho phép các nhà sản xuất triển khai các chiến lược Bảo trì dự phòng tiên tiến, nó cho phép hệ thống tự động nhận biết sự suy giảm hiệu suất của Hộp số hoặc lỗi Encoder trước khi chúng gây ra sự cố dừng máy.
6.2. Động cơ servo Tự điều chỉnh và Tối ưu hóa Tải trọng
Thế hệ servo tiếp theo sẽ tích hợp các thuật toán học máy (Machine Learning) để tạo ra khả năng tự điều chỉnh (Auto-Tuning) động học. Servo thông minh có thể tự động nhận biết và bù đắp sự thay đổi về Tải trọng hoặc các đặc tính cơ học của máy móc theo thời gian, từ đó duy trì hiệu suất điều khiển Vòng lặp kín tối ưu mà không cần sự can thiệp của kỹ sư.
Điều này là đặc biệt quan trọng trong môi trường Sản xuất công nghiệp linh hoạt, nơi mà các tham số vận hành (như Vị trí đặt trước và Vận tốc) thay đổi thường xuyên. Khả năng tự động tối ưu hóa Thời gian đáp ứng này sẽ nâng cao hơn nữa Thông lượng và độ tin cậy.

7. Kết luận
Lịch sử động cơ servo minh chứng cho tiến bộ vượt bậc trong điều khiển chuyển động, từ cơ chế định vị đơn giản đến hệ thống điện-tử cơ thông minh. Servo hiện đại giải quyết Thời gian đáp ứng, Vận tốc, và độ chính xác, tích hợp AC Servo, Vòng lặp kín với Encoder, Giao tiếp Mạng và tự chẩn đoán, hỗ trợ Bảo trì dự phòng và tối ưu hóa hiệu suất trong Công nghiệp 4.0, đảm bảo năng suất và độ tin cậy tối đa.