
Động cơ servo
Khái niệm động cơ servo và Vai trò Đột phá trong Sản xuất công nghiệp
Động cơ servo kiểm soát chính xác vị trí, vận tốc và mô-men xoắn nhờ Vòng lặp kín, trở thành “trái tim” của robot, CNC và dây chuyền tốc độ cao. Bài viết phân tích cấu tạo, nguyên lý và ứng dụng, đồng thời đề xuất giải pháp đảm bảo an toàn lao động khi vận hành hệ thống tốc độ và tải trọng lớn. Bài viết chuyên sâu này sẽ trình bày một phân tích toàn diện về Khái niệm động cơ servo, làm rõ cấu tạo, nguyên lý Vòng lặp kín đặc trưng, và các ứng dụng đột phá trong Sản xuất công nghiệp.
1. Sự trỗi dậy của Khái niệm động cơ servo trong Tự động hóa
Sự phát triển của Sản xuất công nghiệp hiện đại đã thúc đẩy một nhu cầu bức thiết về các hệ thống điều khiển chuyển động có khả năng kiểm soát Vị trí thực tế, tốc độ, và mô-men xoắn với độ chính xác cao hơn nhiều so với các động cơ tiêu chuẩn. Các dây chuyền sản xuất tiên tiến, từ lắp ráp linh kiện điện tử đến đóng gói thực phẩm, đòi hỏi sự đồng bộ hoàn hảo và khả năng định vị vi mô.
Giới hạn cố hữu của các động cơ truyền thống, như động cơ AC/DC thông thường hay động cơ bước, là không thể đáp ứng yêu cầu Vòng lặp kín và Thời gian đáp ứng nhanh cần thiết cho các hoạt động động học (dynamic operation) liên tục. Các động cơ truyền thống thường hoạt động theo Vòng lặp hở, không có cơ chế phản hồi để điều chỉnh sai số vị trí.
Khái niệm động cơ servo ra đời như một giải pháp đột phá, nó là một hệ thống điều khiển Vòng lặp kín chuyên biệt được thiết kế để duy trì đầu ra (vị trí, tốc độ) theo Vị trí đặt trước (Setpoint) với sai số tối thiểu.

2. Cấu tạo và Nguyên lý hoạt động cốt lõi của Động cơ Servo
2.1. Các thành phần cốt lõi tạo nên Khái niệm động cơ servo
Khái niệm động cơ servo được định hình bởi sự tương tác hài hòa của ba thành phần cốt lõi, chúng đảm bảo nguyên lý Vòng lặp kín hoạt động hiệu quả. Các thành phần cốt lõi của Động cơ Servo bao gồm:
- Động cơ (Motor): Thực hiện chức năng chuyển đổi năng lượng điện thành mô-men xoắn cơ học, thường là loại AC không chổi than (Brushless AC) để cung cấp mật độ công suất cao và Vận tốc lớn.
- Bộ mã hóa (Encoder) hoặc Bộ phản hồi (Feedback Device): Thực hiện chức năng đo lường Vị trí thực tế hoặc tốc độ quay của trục động cơ, nó truyền dữ liệu này về bộ điều khiển dưới dạng tín hiệu số hoặc tương tự.
- Bộ điều khiển (Drive/Controller): Thực hiện chức năng xử lý trung tâm, nó nhận tín hiệu Vị trí đặt trước, so sánh với dữ liệu từ Encoder, và tính toán lệnh điều khiển để gửi đến động cơ.
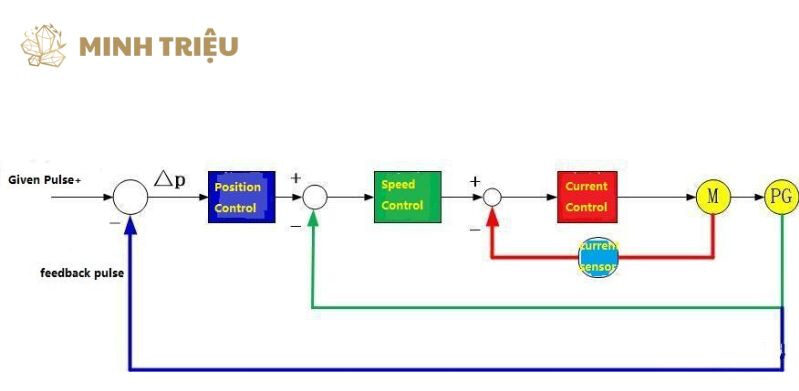
2.2. Nguyên lý Vòng lặp kín (Closed-Loop) và Độ chính xác
Nguyên lý Vòng lặp kín là đặc trưng cơ bản và quan trọng nhất giải thích độ chính xác vượt trội của Động cơ Servo. Bộ điều khiển thực hiện chức năng liên tục so sánh Vị trí đặt trước (lệnh) với Vị trí thực tế (phản hồi từ Encoder), nó tính toán một giá trị sai số. Sai số này được sử dụng để tính toán dòng điện hoặc điện áp cần thiết để điều chỉnh động cơ, đảm bảo đầu ra khớp với yêu cầu.
Quá trình này diễn ra lặp đi lặp lại với tốc độ cực cao, tạo ra Thời gian đáp ứng gần như tức thời và cho phép Động cơ Servo duy trì độ chính xác lặp lại (repeatability) trong điều kiện Tải trọng và Vận tốc thay đổi. Nếu một lực cản bên ngoài làm lệch trục, Vòng lặp kín sẽ tự động bù đắp để đưa trục về Vị trí đặt trước.
2.3. Sự khác biệt giữa Động cơ Servo và các loại động cơ khác
Động cơ Servo có ưu thế vượt trội so với các loại động cơ khác trong Sản xuất công nghiệp nhờ cơ chế Vòng lặp kín vốn là cốt lõi trong Khái niệm động cơ servo.
Dưới đây là bảng so sánh động cơ Servo với động cơ bước và động cơ AC/DC thường
| Đặc điểm | Động cơ Servo | Động cơ Bước (Stepper) | Động cơ AC/DC Thường |
| Cơ chế điều khiển | Vòng lặp kín (Closed-Loop) | Vòng lặp hở (Open-Loop) | Vòng lặp hở (Chủ yếu tốc độ) |
| Độ chính xác | Cao, Đảm bảo vị trí và Vận tốc | Tốt, nhưng dễ mất bước khi Tải trọng cao | Thấp, Không điều khiển vị trí |
| Thời gian đáp ứng | Rất nhanh (Mili giây) | Chậm (Phải đợi xung) | Phụ thuộc vào quán tính |
| Hiệu suất Năng lượng | Cao, Tiêu thụ năng lượng theo Tải trọng | Thấp, Tiêu thụ năng lượng tối đa ngay cả khi đứng yên | Phụ thuộc vào thiết kế |
| Chi phí | Cao | Trung bình | Thấp |
| Ứng dụng tiêu biểu | Robotics, CNC, Băng tải chính xác | In 3D, thiết bị định vị đơn giản | Máy bơm, quạt, Hệ thống băng tải tự động thô sơ |
3. Phân loại và Đặc điểm kỹ thuật quan trọng
3.1. Phân loại cơ bản trong Động cơ servo trong sản xuất công nghiệp
Động cơ Servo được phân loại thành nhiều loại dựa trên cấu trúc điện và hình thức chuyển động, chúng đáp ứng các yêu cầu đa dạng của Sản xuất công nghiệp. Loại phổ biến nhất là AC Servo Motor, nó chiếm ưu thế do cung cấp mô-men xoắn cao và Vận tốc lớn, thích hợp cho hầu hết các ứng dụng Công nghiệp nặng.
DC Servo Motor thường được sử dụng trong các ứng dụng công suất nhỏ hơn, như các thiết bị y tế hoặc phòng thí nghiệm. Đặc biệt, Linear Servo Motor thực hiện chuyển động thẳng trực tiếp mà không cần cơ cấu vít me hoặc Hộp số, nó cung cấp độ chính xác và Thời gian đáp ứng cực nhanh, lý tưởng cho các máy cắt laser hoặc định vị quang học.
3.2. Các thông số kỹ thuật quyết định hiệu suất
Việc lựa chọn Động cơ Servo phù hợp phụ thuộc vào việc hiểu rõ các thông số kỹ thuật then chốt, chúng quyết định khả năng đáp ứng chính xác yêu cầu của hệ thống Sản xuất công nghiệp.
| Thông số | Định nghĩa | Vai trò trong Ứng dụng |
| Mô-men xoắn liên tục (Rated Torque) | Là mô-men xoắn tối đa Động cơ Servo có thể duy trì liên tục mà không bị quá nhiệt. | Quyết định khả năng xử lý Tải trọng và duy trì Vận tốc sản xuất ổn định. |
| Vận tốc tối đa (Max Speed) | Là tốc độ quay cao nhất Động cơ Servo có thể đạt được trong thời gian ngắn. | Quyết định Thời gian đáp ứng cho các chu kỳ di chuyển nhanh. |
| Độ phân giải Encoder | Là số xung/vòng quay (PPR) mà Encoder cung cấp cho bộ điều khiển. | Quyết định độ chính xác vi mô của Vị trí thực tế và độ chính xác lặp lại của hệ thống. |
| Quán tính Rotor | Là khả năng chống lại sự thay đổi Vận tốc của phần quay. | Ảnh hưởng đến khả năng tăng/giảm tốc nhanh và sự ổn định điều khiển Vòng lặp kín. |
4. Ứng dụng đột phá của Động cơ Servo trong Sản xuất công nghiệp
4.1. Điều khiển chuyển động chính xác trong Robotics và CNC
Động cơ Servo đóng vai trò là hệ thống cơ bắp và thần kinh của các thiết bị tự động hóa phức tạp, nó cung cấp khả năng điều khiển chuyển động chính xác tuyệt đối. Trong lĩnh vực robotics, Động cơ Servo là động lực cho từng khớp robot, nó cho phép robot thực hiện các thao tác phức tạp như hàn, lắp ráp, hoặc sơn với độ chính xác và Thời gian đáp ứng cao. Tương tự, trong máy CNC, Động cơ Servo đảm bảo các trục X, Y, Z di chuyển theo quỹ đạo vi mô được lập trình, tạo ra các sản phẩm gia công có dung sai chặt chẽ.
4.2. Tối ưu hóa dây chuyền tốc độ cao và Hệ thống băng tải tự động
Động cơ Servo giúp tối ưu hóa dây chuyền sản xuất tốc độ cao, nó đảm bảo sự đồng bộ và linh hoạt cần thiết cho Thông lượng lớn. Trong Hệ thống băng tải tự động, Servo cho phép điều chỉnh Vận tốc băng tải ngay lập tức để phù hợp với tốc độ đóng gói hoặc phân loại.
Các ứng dụng tiêu biểu của Động cơ Servobao gồm:
- Máy Đóng gói & Chai lọ: Đảm bảo căn chỉnh chính xác nhãn mác, nạp liệu, và niêm phong ở Vận tốc hàng trăm sản phẩm/phút.
- Máy Cắt bay (Flying Shear): Thực hiện chức năng cắt vật liệu đang di chuyển mà không cần dừng, nó đòi hỏi sự đồng bộ Vòng lặp kín tuyệt đối giữa lưỡi cắt và Vận tốc băng tải.
- Hệ thống Phân loại (Sorting Systems): Đảm bảo các tay gắp di chuyển chính xác và nhanh chóng để phân loại sản phẩm theo kích thước hoặc trọng lượng.

5. Thách thức về an toàn lao động liên quan đến Động cơ Servo (Trọng tâm)
5.1. Rủi ro do Tốc độ cao, Mô-men xoắn lớn và Vận tốc động học
Thách thức về an toàn lao động lớn nhất phát sinh từ chính ưu điểm của Động cơ Servo, đó là tốc độ cao, mô-men xoắn lớn, và Vận tốc chuyển động động học. Động cơ Servo có khả năng tăng tốc gần như ngay lập tức, nó tạo ra nguy cơ va chạm nghiêm trọng hoặc chấn thương dập nát nếu công nhân tiếp xúc với khu vực chuyển động. Các rủi ro an toàn chính của Động cơ Servo bao gồm:
- Nguy cơ kẹt và cắt: Phát sinh do sự chuyển động nhanh và mạnh của các cơ cấu chấp hành (ví dụ: tay robot, bộ phận kẹp).
- Chuyển động không kiểm soát (Uncontrolled Motion): Xảy ra khi lỗi phần mềm, lỗi Encoder, hoặc lỗi điều khiển Vòng lặp kín làm động cơ tạo ra chuyển động ngoài ý muốn.
- Tổn thương do Quán tính: Phát sinh ngay cả khi đã ngắt điện, các hệ thống Công nghiệp nặng vẫn có quán tính lớn, đòi hỏi thời gian dừng đáng kể, tạo ra mối đe dọa.
5.2. An toàn điện và Quy trình ngắt khẩn cấp (Emergency Stop)
An toàn điện là mối quan tâm hàng đầu, nó liên quan đến việc vận hành các Động cơ Servo công suất lớn sử dụng điện áp cao. Việc bảo trì hoặc can thiệp vào hệ thống đòi hỏi quy trình LOTO (Lockout/Tagout) nghiêm ngặt, nó đảm bảo nguồn năng lượng được cô lập hoàn toàn và không thể tái kích hoạt.
Bên cạnh đó, Quy trình ngắt khẩn cấp (E-Stop) phải được thiết kế theo tiêu chuẩn an toàn (ví dụ: ISO 13849), nó đảm bảo khi kích hoạt, nguồn mô-men xoắn bị ngắt một cách an toàn và tức thời, ngăn chặn động cơ tạo ra bất kỳ chuyển động nào. Thời gian đáp ứng của mạch an toàn cần phải được tối ưu hóa để giảm thiểu khoảng cách dừng.
5.3. Quy trình Bảo trì dự phòng và Đào tạo an toàn chuyên sâu
Bảo trì dự phòng cho Động cơ Servo mang tính kỹ thuật cao, nó đòi hỏi sự kiểm tra liên tục tính toàn vẹn của Vòng lặp kín và các thành phần liên quan. Lỗi Encoder hoặc lỏng cáp phản hồi có thể dẫn đến sự mất kiểm soát của Vòng lặp kín, gây ra chuyển động giật mạnh, tạo ra Tình huống khẩn cấp nguy hiểm.
Do đó, nhân viên cần được đào tạo an toàn chuyên sâu (Đào tạo an toàn) về cách nhận biết các dấu hiệu lỗi sớm của Hộp số hoặc Encoder, và thực hiện quy trình can thiệp an toàn điện/cơ. Chương trình Đào tạo an toàn nên bao gồm mô phỏng kịch bản lỗi để nâng cao phản xạ.

6. Giải pháp an toàn khi vận hành Động cơ Servo
6.1. Sử dụng Cảm biến an toàn và Hệ thống giám sát Vị trí thực tế
Việc áp dụng Cảm biến an toàn là biện pháp phòng ngừa vật lý hiệu quả nhất, nó giúp thiết lập các vùng bảo vệ động. Cảm biến an toàn (như rèm sáng, máy quét laser) có thể phát hiện sự xâm nhập của con người vào khu vực nguy hiểm, nó tự động kích hoạt lệnh dừng an toàn (Safety Stop) cho Động cơ Servo liên quan.
Ngoài ra, việc giám sát Vị trí thực tế độc lập được thực hiện bởi PLC an toàn, nó nhận tín hiệu từ Encoder và kiểm tra xem động cơ có vượt qua Vị trí đặt trước an toàn hay không, đảm bảo Vòng lặp kín luôn nằm trong giới hạn an toàn.
6.2. Triển khai Chức năng An toàn Tích hợp (Integrated Safety Functions)
Các bộ điều khiển Động cơ Servo hiện đại đã tích hợp các chức năng an toàn theo tiêu chuẩn quốc tế, chúng cung cấp khả năng kiểm soát động lực của động cơ để giải quyết các Thách thức về an toàn lao động một cách hiệu quả.
Việc sử dụng các chức năng như STO, SS1 và SLS giúp tối ưu hóa quy trình làm việc, nó cho phép công nhân tiến hành bảo trì hoặc gỡ lỗi mà không cần dừng hoàn toàn hệ thống, nhưng vẫn đảm bảo mô-men xoắn và Vận tốc luôn được kiểm soát ở mức an toàn.
6.3. Tối ưu hóa Thời gian đáp ứng cho các thành phần an toàn
Thời gian đáp ứng của toàn bộ chuỗi an toàn cần được tối ưu hóa và kiểm chứng để đảm bảo máy móc có thể dừng trong phạm vi vật lý được tính toán. Khoảng cách dừng an toàn phụ thuộc trực tiếp vào Thời gian đáp ứng của hệ thống an toàn (từ Cảm biến an toàn đến lệnh STO).
Việc tối ưu hóa này liên quan đến việc lựa chọn các rơ-le an toàn và PLC an toàn có tốc độ xử lý nhanh, nó đảm bảo động cơ không thể vượt qua ngưỡng Vị trí đặt trước nguy hiểm trong suốt quá trình dừng khẩn cấp, giảm thiểu Thách thức về an toàn lao động.

7. Kết luận
Khái niệm động cơ servo đã định hình lại nền tảng của tự động hóa, nó cung cấp độ chính xác và Vận tốc cần thiết để thúc đẩy Sản xuất công nghiệp đạt đến mức độ hiệu quả chưa từng thấy. Khả năng điều khiển Vòng lặp kín và Thời gian đáp ứng nhanh là yếu tố then chốt phân biệt Động cơ Servo với các công nghệ truyền động khác. Tuy nhiên, sự mạnh mẽ này đòi hỏi một chiến lược an toàn chủ động, được xây dựng dựa trên việc hiểu rõ các rủi ro động học và điện áp cao. Việc tích hợp các chức năng an toàn như STO, SS1, và Cảm biến an toàn tiên tiến là con đường duy nhất để giải quyết triệt để Thách thức về an toàn lao động.