
Thị giác máy (Machine Vision)
Phân đoạn Ngữ Nghĩa (Semantic Segmentation): Chìa Khóa Vàng cho Thị Giác Máy Cấp độ Pixel trong Sản Xuất Công Nghiệp

Cập nhật lần cuối 4 Tháng 10, 2025 bởi huong
Phân đoạn ngữ nghĩa (semantic segmentation) là một kỹ thuật đột phá trong Thị giác máy (Machine Vision), cung cấp khả năng hiểu biết hình ảnh ở cấp độ chính xác nhất: phân loại từng pixel thuộc về đối tượng nào. Công nghệ tiên tiến này đang thay thế các phương pháp truyền thống, cho phép các hệ thống kiểm tra chất lượng tự động phát hiện những khuyết tật siêu nhỏ và cung cấp thông tin chi tiết, chính xác cho việc điều khiển robot guidance phức tạp trong các môi trường sản xuất linh hoạt và tốc độ cao.
1. Từ Phát hiện Cơ bản đến Hiểu biết Pixel-Level
Trong kỷ nguyên Tự động hóa 4.0, các nhà máy không chỉ cần robot nhanh hơn mà còn cần hệ thống kiểm soát chất lượng và định vị robot thông minh hơn. Thị giác máy (Machine Vision) đóng vai trò trung tâm, nhưng các phương pháp truyền thống đã bộc lộ nhiều hạn chế khi đối mặt với sự phức tạp và đa dạng của các sản phẩm hiện đại.
Các phương pháp Thị giác máy cơ bản như Phân loại ảnh (Image Classification) chỉ đơn giản xác định có hay không có đối tượng trong một hình ảnh. Trong khi đó, Phát hiện đối tượng (Object Detection) sử dụng Hộp giới hạn (Bounding Box) để khoanh vùng vị trí đối tượng.
Tuy nhiên, khi cần phát hiện một vết nứt nhỏ chỉ vài pixel trên bề mặt kim loại, hay khi robot cần nắm bắt một chi tiết có hình dạng bất thường nằm lẫn lộn trong thùng chứa, các phương pháp này không đủ chính xác. Hộp giới hạn bao gồm cả phần nền không liên quan, làm nhiễu thông tin tọa độ và không thể xác định hình dạng chính xác của vật thể.
Sự ra đời của Phân đoạn ngữ nghĩa (semantic segmentation) đã giải quyết triệt để vấn đề này. Nó cung cấp cho hệ thống Thị giác máy khả năng phân tích pixel-by-pixel, giúp robot và hệ thống kiểm tra “nhìn thấy” chính xác đường viền và khu vực của đối tượng hoặc khuyết tật. Công nghệ này chuyển đổi dữ liệu hình ảnh thô thành thông tin ngữ cảnh có cấu trúc cao, đưa Thị giác máy trong sản xuất công nghiệp lên một tầm cao mới về độ chính xác và tính linh hoạt.

2. Định nghĩa và Cơ chế Hoạt động của Phân đoạn Ngữ nghĩa
Để làm chủ Phân đoạn ngữ nghĩa (semantic segmentation), điều quan trọng là phải hiểu rõ định nghĩa chính xác và cơ chế xử lý dữ liệu của nó, đặc biệt là sự khác biệt với các kỹ thuật Thị giác máy khác.
2.1. Phân loại Cấp độ Pixel (Pixel-Level Classification)
Phân đoạn ngữ nghĩa (semantic segmentation) là một nhiệm vụ học sâu (Deep Learning) nhằm gán một nhãn lớp (class label) cho mỗi pixel trong một hình ảnh. Thay vì chỉ nói rằng “hình ảnh này chứa một con robot” (Phân loại ảnh) hoặc “con robot nằm trong hộp này” (Phát hiện đối tượng), Phân đoạn ngữ nghĩa sẽ trả lời câu hỏi: “Pixel nào thuộc về thân robot, pixel nào thuộc về cánh tay robot, và pixel nào thuộc về nền?”.
Kết quả đầu ra của quá trình Phân đoạn ngữ nghĩa là một bản đồ phân đoạn (Segmentation Map) có kích thước tương đương với ảnh đầu vào, trong đó mỗi giá trị pixel tương ứng với một lớp ngữ nghĩa (ví dụ: 0 là nền, 1 là chi tiết, 2 là khuyết tật).
2.2. Phân biệt với các Công nghệ Thị giác máy khác
| Kỹ thuật | Mục tiêu | Độ chính xác | Ứng dụng điển hình |
|---|---|---|---|
| Phân loại ảnh | Xác định chủ thể chính của ảnh. | Cấp độ ảnh (Image-level) | Phân loại loại sản phẩm (Đạt/Không đạt). |
| Phát hiện đối tượng | Định vị các đối tượng bằng hộp giới hạn. | Cấp độ đối tượng (Object-level) | Đếm chi tiết, định vị sơ bộ cho robot. |
| Phân đoạn Ngữ nghĩa | Phân loại từng pixel vào các lớp ngữ nghĩa. | Cấp độ Pixel (Pixel-level) | Phát hiện khuyết tật, xác định đường viền chính xác, robot guidance lắp ráp. |
| Phân đoạn Thể hiện (Instance Segmentation) | Phân đoạn từng pixel và phân biệt các thể hiện riêng biệt của cùng một lớp (ví dụ: 5 con ốc vít riêng lẻ). | Cấp độ Thể hiện (Instance-level) | Gắp từng chi tiết lộn xộn trong thùng chứa. |

2.3. Mô hình Hoạt động Phân đoạn Ngữ nghĩa
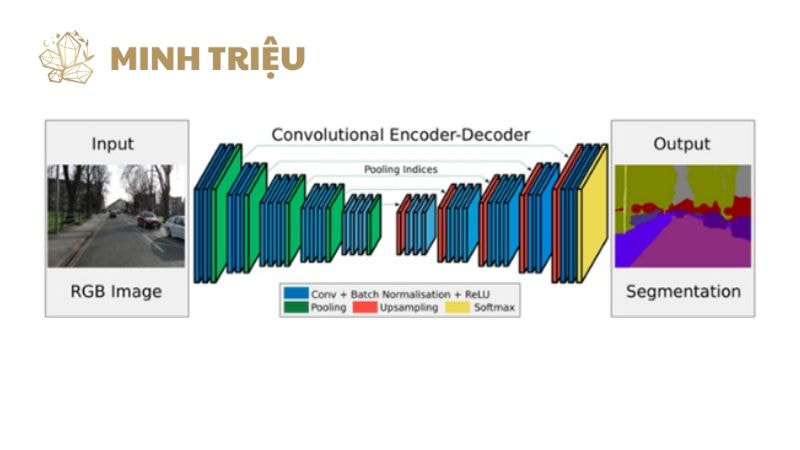
Hệ thống Phân đoạn ngữ nghĩa (semantic segmentation) trong công nghiệp hoạt động dựa trên cấu trúc mạng Encoder-Decoder:
- Mã hóa (Encoder): Phần này thường là một mạng CNN (Convolutional Neural Network) tiêu chuẩn (như VGG, ResNet). Nó thực hiện việc trích xuất các đặc trưng ngữ nghĩa cấp cao bằng cách giảm dần kích thước không gian của ảnh (pooling layers), giúp xác định cái gì có trong ảnh.
- Giải mã (Decoder): Phần này thực hiện quá trình ngược lại, khôi phục lại kích thước không gian của ảnh đầu vào (upsampling hoặc deconvolution), đồng thời sử dụng các đặc trưng đã học để gán nhãn cho từng pixel, giúp xác định vị trí chính xác của đối tượng.
3. Các Kiến trúc Học sâu cốt lõi cho Phân đoạn Ngữ nghĩa
Sự thành công của Phân đoạn ngữ nghĩa (semantic segmentation) phụ thuộc vào việc lựa chọn và tối ưu hóa kiến trúc mạng học sâu phù hợp với yêu cầu về độ chính xác và tốc độ thời gian thực của môi trường sản xuất.
3.1. Mạng Tích chập Hoàn toàn (Fully Convolutional Networks – FCN)
FCN là kiến trúc tiên phong, đã chứng minh rằng có thể loại bỏ hoàn toàn các lớp kết nối đầy đủ (Fully Connected Layers) ở cuối mạng phân loại hình ảnh và thay thế chúng bằng các lớp tích chập (Convolutional Layers).
- Đột phá: Việc loại bỏ lớp Fully Connected giúp FCN có thể chấp nhận ảnh đầu vào với kích thước bất kỳ và cho ra bản đồ nhiệt (Heatmap) hoặc bản đồ phân đoạn có kích thước tùy biến.
- Kỹ thuật Upsampling: FCN sử dụng kỹ thuật Upsampling (ví dụ: Bilinear Interpolation hoặc Transposed Convolution) để khôi phục độ phân giải đầu ra về kích thước ban đầu, đảm bảo rằng mỗi pixel đầu ra tương ứng với một pixel đầu vào, từ đó hoàn thành nhiệm vụ Phân đoạn ngữ nghĩa (semantic segmentation).
3.2. Kiến trúc U-Net: Bảo toàn Chi tiết trong Công nghiệp
U-Net là một biến thể của FCN, được thiết kế đặc biệt cho các ứng dụng yêu cầu độ chính xác cao về đường viền, như hình ảnh y tế hoặc kiểm tra công nghiệp.
Cấu trúc đối xứng: U-Net có hình chữ ‘U’, với phần Mã hóa (Contracting Path) thu nhỏ và phần Giải mã (Expanding Path) mở rộng.
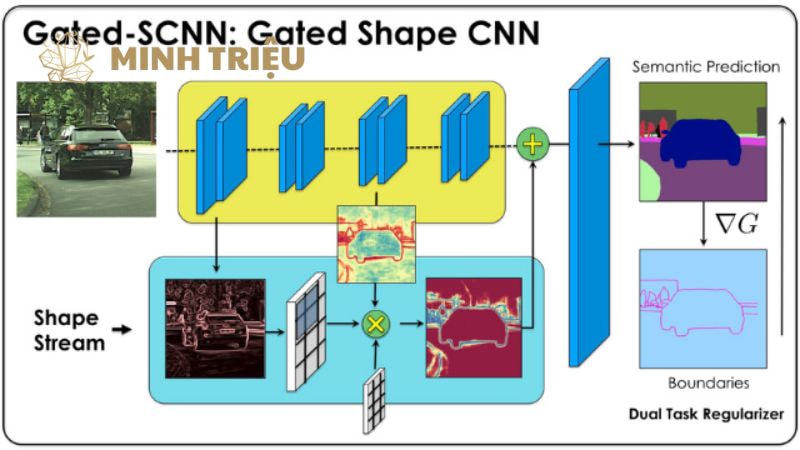
Kết nối Bỏ qua (Skip Connections): Đây là yếu tố then chốt giúp U-Net vượt trội trong sản xuất. Các Skip Connections truyền trực tiếp thông tin đặc trưng chi tiết, độ phân giải cao từ phần Mã hóa sang phần Giải mã tương ứng.
- Tầm quan trọng: Trong công nghiệp, các khuyết tật hoặc đường viền vật thể thường rất nhỏ. Thông tin này dễ bị mất trong quá trình Pooling (giảm kích thước) ở phần Mã hóa. Skip Connections giúp phần Giải mã có đủ thông tin chi tiết để tái tạo lại đường viền đối tượng hoặc khuyết tật một cách chính xác pixel-level, điều này là bắt buộc đối với việc kiểm tra chất lượng.
3.3. DeepLab Family: Mở rộng Trường nhìn
DeepLab là một họ kiến trúc được phát triển bởi Google, nhằm giải quyết vấn đề lớn trong Phân đoạn ngữ nghĩa (semantic segmentation): làm thế nào để có một trường nhìn (Receptive Field) rộng để hiểu bối cảnh mà không làm mất đi độ phân giải chi tiết.
- Tích chập Atrous (Atrous Convolution) / Tích chập Dilated: Thay vì sử dụng Pooling để giảm kích thước (làm mất chi tiết), DeepLab sử dụng Tích chập Atrous (hay còn gọi là Tích chập Dilated). Kỹ thuật này chèn các lỗ (gaps/zeros) giữa các trọng số trong bộ lọc tích chập.
- Lợi ích: Bằng cách tăng khoảng cách giữa các điểm lấy mẫu (sampling points), Tích chập Atrous mở rộng trường nhìn của bộ lọc một cách hiệu quả mà không cần tăng số lượng tham số hay giảm độ phân giải của Feature Map. Điều này rất quan trọng khi phân đoạn các vật thể lớn hoặc các đối tượng có bối cảnh phức tạp (ví dụ: phát hiện các lỗi tổng thể trên một dây chuyền dài).
- ASPP (Atrous Spatial Pyramid Pooling): Đây là một mô-đun quan trọng trong DeepLab, áp dụng Tích chập Atrous với nhiều tốc độ giãn nở (dilation rates) khác nhau để lấy được thông tin đa tỷ lệ (Multi-scale Information). Sự kết hợp này giúp mô hình nhận diện đối tượng ở nhiều kích cỡ khác nhau, từ khuyết tật nhỏ đến vật thể lớn.
4. Ứng dụng đột phá của Phân đoạn Ngữ nghĩa trong Sản xuất Công nghiệp
Phân đoạn ngữ nghĩa (semantic segmentation) là động lực thúc đẩy sự chuyển đổi trong ba lĩnh vực chính của sản xuất: Kiểm tra, Điều khiển robot và Đo lường.

4.1. Kiểm tra Chất lượng Chính xác (Precision Quality Inspection)
Đây là lĩnh vực mà Phân đoạn ngữ nghĩa (semantic segmentation) mang lại giá trị lớn nhất, đặc biệt khi so sánh với các hệ thống kiểm tra bằng mắt thường (AOI) truyền thống.
Phát hiện Khuyết tật Bề mặt (Surface Defect Detection)
- Kim loại và Vật liệu Composite: Trong ngành công nghiệp ô tô và hàng không vũ trụ, yêu cầu về bề mặt là cực kỳ nghiêm ngặt. Phân đoạn ngữ nghĩa được huấn luyện để phân loại từng pixel là “vết nứt”, “lỗ hổng”, “vết xước” hay “bề mặt sạch”. Sự chính xác cấp độ pixel này cho phép hệ thống Thị giác máy phát hiện các khuyết tật chỉ chiếm vài chục pixel, điều mà Phát hiện đối tượng bằng Hộp giới hạn không thể làm được (vì hộp giới hạn sẽ không đủ chi tiết để khoanh vùng chính xác).
- Kiểm tra Kính và Màn hình: Phân đoạn các tạp chất, bọt khí, hay các lỗi in ấn mờ trên bề mặt kính hoặc màn hình OLED/LCD. Mô hình Phân đoạn ngữ nghĩa (semantic segmentation) giúp loại bỏ nhiễu từ phản xạ ánh sáng hoặc nền, chỉ tập trung vào việc khoanh vùng chính xác các pixel lỗi.
Kiểm tra Bảng mạch in (PCB Inspection)
- Phân đoạn đường mạch và mối hàn: Trên các PCB phức tạp, việc kiểm tra các mối hàn (solder joints) và đường mạch (traces) đòi hỏi độ phân giải và độ chính xác cao. Phân đoạn ngữ nghĩa có thể phân loại chính xác các vùng “hàn đạt”, “hàn hở” (open circuit), “cầu hàn” (solder bridge – lỗi ngắn mạch), hoặc “sai lệch vị trí linh kiện”. Điều này giúp giảm đáng kể lỗi và tăng tốc độ kiểm tra so với các hệ thống dựa trên so sánh mẫu truyền thống.
4.2. Tối ưu hóa Điều khiển Robot (Advanced Robot Guidance)
Trong các ứng dụng Robot Guidance, thông tin tọa độ cần phải chính xác đến mức vi mô để robot có thể thực hiện thao tác lắp ráp hoặc gắp nắm mà không gây hỏng hóc.
Bin Picking Nâng cao
- Xử lý vật thể lộn xộn (Clutter): Khi các vật thể nằm lộn xộn trong thùng chứa (Random Bin Picking), Phân đoạn ngữ nghĩa (semantic segmentation), đặc biệt khi áp dụng cho dữ liệu đám mây điểm 3D (Point Cloud), có thể tách biệt ranh giới giữa các vật thể chồng chất lên nhau. Bằng cách phân loại từng điểm 3D (point) thuộc về “vật thể 1”, “vật thể 2”,… hệ thống có thể xác định bề mặt gắp (grasping surface) tối ưu và loại bỏ các điểm nhiễu từ các vật thể xung quanh. Điều này cung cấp tọa độ 6DOF (x,y,z, roll, pitch, yaw) cực kỳ sạch và chính xác cho robot.
- Lắp ráp Linh hoạt (Flexible Assembly): Trong các tác vụ lắp ráp yêu cầu robot guidance chính xác (ví dụ: chèn một chốt vào một lỗ), Phân đoạn ngữ nghĩa được sử dụng để xác định chính xác đường viền của lỗ và đường viền của chốt. Thông tin pixel-level này cho phép robot điều chỉnh vi mô hành trình di chuyển (micro-adjustment) để thực hiện thao tác chèn mà không bị kẹt hay hư hỏng, đặc biệt hữu ích trong các môi trường mà vị trí chi tiết lắp ráp bị dịch chuyển nhẹ.
4.3. Quản lý Quy trình và Đo lường Chính xác
Phân đoạn ngữ nghĩa cung cấp khả năng định lượng và đo lường các đặc tính vật liệu trong quy trình sản xuất.
- Đo lường Diện tích và Thể tích: Trong các quy trình phun sơn, phủ keo, hoặc tráng men, Phân đoạn ngữ nghĩa có thể khoanh vùng chính xác khu vực đã được phủ vật liệu. Sau đó, hệ thống tính toán chính xác diện tích phủ (Area Coverage) ở cấp độ pixel. Điều này giúp kiểm soát chất lượng, định lượng hóa mức tiêu thụ vật liệu và đảm bảo tính đồng nhất của sản phẩm.
- Giám sát Tình trạng Máy móc (Condition Monitoring): Phân đoạn các dấu hiệu hao mòn, rò rỉ dầu mỡ, hoặc sự tích tụ bụi bẩn trên các bộ phận máy móc quan trọng. Bằng cách theo dõi sự thay đổi diện tích của các pixel được phân loại là “rò rỉ” theo thời gian, các nhà sản xuất có thể thực hiện bảo trì dự đoán (Predictive Maintenance) trước khi xảy ra hỏng hóc nghiêm trọng.
5. Thách thức Triển khai và Giải pháp Tối ưu hóa trong Công nghiệp
Mặc dù Phân đoạn ngữ nghĩa (semantic segmentation) mang lại nhiều lợi ích, việc triển khai nó trong môi trường sản xuất thời gian thực đặt ra những thách thức lớn.
5.1. Thách thức về Ghi nhãn Dữ liệu (Data Labeling)
Độ phức tạp và Chi phí: Việc tạo ra tập dữ liệu huấn luyện cho Phân đoạn ngữ nghĩa phức tạp hơn nhiều so với Phát hiện đối tượng. Thay vì chỉ cần vẽ một hộp, người ghi nhãn phải vẽ đường viền (mask) cho từng pixel của đối tượng, một quá trình cực kỳ tốn thời gian và đòi hỏi sự tỉ mỉ cao. Đối với các khuyết tật siêu nhỏ, việc ghi nhãn thủ công càng khó khăn hơn.

Giải pháp:
- Ghi nhãn Bán tự động (Semi-automated Labeling): Sử dụng các công cụ có hỗ trợ AI, cho phép mô hình dự đoán mask ban đầu, sau đó con người chỉ cần chỉnh sửa các đường viền. Kỹ thuật này giảm thời gian ghi nhãn lên đến 80%.
- Học Chuyển giao (Transfer Learning): Bắt đầu quá trình huấn luyện từ các mô hình đã được huấn luyện trên các tập dữ liệu lớn và chung chung (ví dụ: COCO, ImageNet), sau đó tinh chỉnh (Fine-tune) bằng một lượng nhỏ dữ liệu công nghiệp chuyên biệt.
5.2. Thách thức về Tính toán và Tốc độ (Computational Cost & Latency)
Mô hình Phân đoạn ngữ nghĩa (semantic segmentation) thường lớn và yêu cầu nhiều phép tính hơn các mô hình Phát hiện đối tượng vì chúng phải xử lý và trả về dữ liệu ở độ phân giải đầy đủ.
Vấn đề Latency: Trong dây chuyền tốc độ cao, độ trễ (latency) của quá trình suy luận (Inference) phải rất thấp (dưới 50ms). Các mô hình phức tạp như DeepLab có thể không đáp ứng được.
Giải pháp Tối ưu hóa Mô hình:
- Lượng tử hóa (Quantization): Chuyển đổi mô hình đã huấn luyện từ độ chính xác Float32 sang Int8. Việc này làm giảm kích thước mô hình và tăng tốc độ suy luận mà không ảnh hưởng đáng kể đến độ chính xác (ví dụ: sử dụng TensorRT hoặc OpenVINO).
- Sử dụng Kiến trúc nhẹ: Thay thế các Backbone nặng (như ResNet-101) bằng các kiến trúc hiệu quả tính toán như MobileNet hoặc EfficientNet trong cấu trúc U-Net hoặc FCN. Các mô hình này được thiết kế để hoạt động nhanh trên các thiết bị Edge Computing.
Giải pháp Phần cứng (Edge Computing): Triển khai mô hình trên các thiết bị xử lý tại chỗ (Edge Devices) có tích hợp GPU hoặc chip chuyên dụng (TPU/NPU) thay vì gửi toàn bộ dữ liệu hình ảnh lên đám mây (Cloud), giúp giảm đáng kể thời gian truyền dữ liệu và độ trễ xử lý.
5.3. Thách thức về Tính đồng nhất của Vật liệu và Ánh sáng
- Bề mặt Đồng nhất (Homogeneous Surfaces): Khi vật thể là một khối kim loại lớn không có nhiều đặc trưng hình học, các thuật toán tìm kiếm cạnh truyền thống sẽ thất bại. Phân đoạn ngữ nghĩa (semantic segmentation) dựa vào các đặc trưng trừu tượng mà mạng học sâu học được để phân biệt đối tượng với nền ngay cả trong điều kiện này.
- Giải pháp Ánh sáng: Sử dụng các kỹ thuật chiếu sáng phức tạp (như đèn trường tối – Dark-Field Illumination) để làm nổi bật các khuyết tật nhỏ. Tuy nhiên, hình ảnh vẫn cần được tiền xử lý bằng các bộ lọc ánh sáng phân cực (Polarized Filters) để loại bỏ nhiễu do phản xạ, trước khi đưa vào mô hình Phân đoạn ngữ nghĩa (semantic segmentation).
6. Kết luận
Phân đoạn ngữ nghĩa (semantic segmentation) không chỉ là một thuật toán, mà là một bước nhảy vọt chiến lược trong lĩnh vực Thị giác máy (Machine Vision). Nó là công cụ bắt buộc cho việc đạt được độ chính xác pixel-level, giúp các nhà sản xuất giải quyết triệt để các thách thức về kiểm tra chất lượng vi mô và tối ưu hóa robot guidance cho các tác vụ lắp ráp phức tạp. Việc áp dụng các kiến trúc mạng tiên tiến và vượt qua rào cản về dữ liệu ghi nhãn sẽ giúp doanh nghiệp duy trì lợi thế cạnh tranh, tiến tới một kỷ nguyên sản xuất hoàn toàn tự động và linh hoạt.