
Thị giác máy (Machine Vision)
Thị Giác Máy Trên Nền Tảng Nhúng (Embedded Vision) Trong Sản Xuất Công Nghiệp
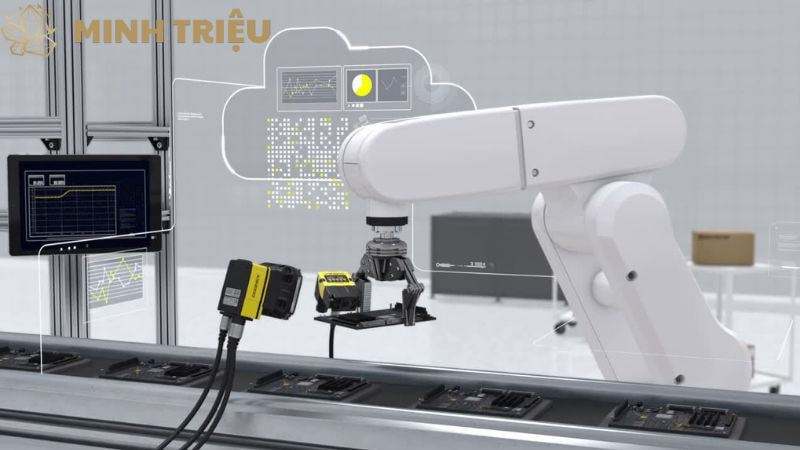
Embedded Vision (thị giác máy trên nền tảng nhúng) đánh dấu bước chuyển quan trọng trong công nghiệp, khi các chức năng thu thập, xử lý và phân tích hình ảnh được tích hợp trực tiếp vào phần cứng nhỏ gọn. Nhờ đó, hệ thống có thể xử lý dữ liệu ngay tại biên (Edge), giảm độ trễ, tăng tốc độ phản hồi và đáp ứng yêu cầu khắt khe của sản xuất tốc độ cao cũng như robot tự hành. Đây là nền tảng cốt lõi giúp doanh nghiệp tối ưu hóa hiệu suất và duy trì lợi thế cạnh tranh trong kỷ nguyên Công nghiệp 4.0.
1. Giới Thiệu Chung Về Embedded Vision và Tầm Quan Trọng
1.1. Định Nghĩa và Cơ Chế Hoạt Động Của Thị Giác Máy Trên Nền Tảng Nhúng (Embedded Vision)
Embedded Vision là một hệ thống tích hợp cao, điều này kết hợp cảm biến hình ảnh, bộ xử lý chuyên dụng, và phần mềm Thị giác máy vào một bo mạch đơn hoặc thiết bị nhỏ gọn, tự chủ. Khái niệm cốt lõi của công nghệ này là thực hiện toàn bộ quá trình xử lý dữ liệu hình ảnh ngay bên trong thiết bị, việc này được gọi là Phân tích tại biên (Edge Computing).
Thiết bị thu thập hình ảnh, xử lý chúng bằng các thuật toán phức tạp (bao gồm cả Mô hình học sâu – Deep Learning Models), và cuối cùng đưa ra quyết định hoặc lệnh điều khiển chỉ trong vài mili giây. Sự tự chủ này giúp Embedded Vision khác biệt hoàn toàn so với các hệ thống truyền thống, điều đó vốn dựa vào máy tính trung tâm hiệu suất cao để thực hiện tính toán.
Hệ thống hoạt động theo nguyên tắc tích hợp chặt chẽ giữa phần cứng và phần mềm. Cảm biến CMOS hoặc CCD chụp lại hình ảnh, sau đó dữ liệu thô được chuyển đến bộ xử lý SoC (System-on-Chip) hoặc FPGA (Field-Programmable Gate Array) tích hợp. Bộ xử lý thực hiện các bước tiền xử lý hình ảnh và chạy các thuật toán Computer Vision được tối ưu hóa.
Việc này đảm bảo rằng chỉ có thông tin kết quả (ví dụ: tọa độ, loại khuyết tật, lệnh OK/NG) được truyền đi, giúp tiết kiệm băng thông mạng một cách đáng kể. Tính chuyên dụng của phần cứng nhúng cho phép thực hiện các tác vụ xử lý song song với độ trễ thấp, điều này là không thể thiếu trong các ứng dụng Real-time của sản xuất công nghiệp.
1.2. Bối Cảnh Lịch Sử và Vị Thế Trong Kỷ Nguyên Công Nghiệp 4.0
Robot công nghiệp đã chuyển đổi từ tự động hóa cứng (fixed automation) sang mô hình tự động hóa linh hoạt và thông minh. Trong quá khứ, Thị giác máy đòi hỏi các máy tính công nghiệp lớn, mạnh mẽ và đắt tiền, điều này giới hạn việc triển khai chỉ ở những vị trí cố định và quan trọng. Tuy nhiên, sự phát triển đột phá của các chip SoC hiệu suất cao và giá thành phải chăng đã tạo điều kiện cho sự ra đời của Embedded Vision.
Embedded Vision đáp ứng nhu cầu cấp thiết về tính di động và phân tán của các hệ thống trong Công nghiệp 4.0. Nó cung cấp khả năng phân tích hình ảnh thời gian thực cho các thiết bị như robot cộng tác (Cobots), robot di động tự hành (AMR/AGV), và các cảm biến kiểm tra lắp đặt trên dây chuyền sản xuất tốc độ cao.
Vị thế của nó nằm ở khả năng mang trí thông minh AI (Artificial Intelligence) trực tiếp đến dây chuyền, việc này cho phép mỗi điểm sản xuất trở thành một đơn vị thu thập và ra quyết định độc lập. Sự bùng nổ của học sâu (Deep Learning) cũng được hỗ trợ bởi Embedded Vision, vì các thuật toán như TensorFlow Lite (TFLite) có thể được tối ưu hóa để chạy hiệu quả trên các chip nhúng với tốc độ xử lý đủ nhanh.
2. Kiến Trúc Công Nghệ Cốt Lõi Của Hệ Thống Embedded Vision
2.1. Các Thành Phần Chính Của Một Thiết Bị Embedded Vision
Một thiết bị Embedded Vision hoàn chỉnh bao gồm nhiều thành phần phần cứng và phần mềm được tích hợp chặt chẽ để đạt được hiệu suất tối ưu.
Cảm biến Hình ảnh (Image Sensor): Thành phần này thực hiện chức năng thu thập ánh sáng và chuyển đổi thành tín hiệu điện tử. Hầu hết các hệ thống Embedded Vision sử dụng cảm biến CMOS (Complementary Metal-Oxide Semiconductor), điều này được ưa chuộng hơn so với CCD (Charge-Coupled Device) vì nó cung cấp khả năng đọc điểm ảnh nhanh hơn và tiêu thụ ít điện năng hơn, việc này cực kỳ quan trọng đối với các nền tảng nhúng có giới hạn năng lượng.
Bộ xử lý (Processor): Đây là trái tim của hệ thống, có chức năng thực hiện tất cả các thuật toán Computer Vision. Sự lựa chọn phụ thuộc vào yêu cầu về tốc độ xử lý và độ trễ thấp.
- SoC (System-on-Chip): Tích hợp CPU, GPU (hoặc NPU – Neural Processing Unit), và các bộ điều khiển ngoại vi trên một chip đơn, việc này mang lại sự cân bằng tốt giữa hiệu suất và tiêu thụ điện năng.
- FPGA (Field-Programmable Gate Array): Cung cấp khả năng xử lý song song tuyệt vời, lý tưởng hóa cho các tác vụ xử lý hình ảnh tốc độ cao, lặp đi lặp lại như tiền xử lý hình ảnh và lọc nhiễu, điều này đạt được độ trễ thấp nhất.
Bộ nhớ (Memory): Hệ thống sử dụng bộ nhớ nhanh (ví dụ: DDR SDRAM) để lưu trữ tạm thời dữ liệu hình ảnh thô và bộ nhớ Flash/eMMC để chứa hệ điều hành và Mô hình học sâu.
Giao tiếp Công nghiệp (I/O): Bao gồm các giao diện truyền dữ liệu (GigE Vision, USB3 Vision) và các cổng I/O kỹ thuật số để giao tiếp Real-time với bộ điều khiển PLC hoặc robot.
2.2. Nền Tảng Phát Triển Phần Mềm và Thuật Toán Tích Hợp
Phát triển phần mềm cho Embedded Vision đòi hỏi sự chuyên biệt để tối ưu hóa hiệu suất trên tài nguyên phần cứng giới hạn.
- Hệ điều hành (Operating System): Các thiết bị Embedded Vision thường chạy trên phiên bản tối giản của Linux (ví dụ: Yocto Project) hoặc một RTOS (Real-Time Operating System), việc này đảm bảo khả năng phản hồi Real-time và giảm thiểu các quá trình nền không cần thiết.
- Khung công tác Thị giác Máy (Vision Frameworks): Thư viện OpenCV (Optimized for embedded) là lựa chọn phổ biến, vì nó cung cấp một bộ đầy đủ các thuật toán Computer Vision cơ bản và nâng cao, đồng thời được tối ưu hóa để tận dụng các lệnh vector hóa của chip nhúng.
- Triển khai AI tại Biên (AI at the Edge): Đây là yếu tố then chốt để mang lại khả năng phân loại và nhận dạng đối tượng thông minh. Các công cụ như TensorFlow Lite (TFLite), OpenVINO hoặc ONNX Runtime được sử dụng để lượng tử hóa (Quantization) và tối ưu hóa các Mô hình học sâu đã được huấn luyện, việc này giúp giảm kích thước mô hình và tăng tốc độ xử lý inference trên phần cứng nhúng. Quá trình tối ưu hóa này là cần thiết để mô hình AI có thể chạy trong giới hạn bộ nhớ và điện toán của Embedded Vision.
2.3. Quy Trình Xử Lý Hình Ảnh Từ Camera Đến Quyết Định Hành Động
Hệ thống Embedded Vision thực hiện một chu trình xử lý nhanh chóng để biến ánh sáng thành lệnh điều khiển.
- Thu thập Dữ liệu (Acquisition): Cảm biến CMOS chụp ảnh và chuyển đổi dữ liệu thô (Raw data) sang định dạng kỹ thuật số.
- Tiền xử lý Hình ảnh (Pre-processing): Bộ xử lý thực hiện các thao tác cơ bản như hiệu chỉnh màu sắc, giảm nhiễu (Noise Reduction), và cân bằng trắng, việc này cải thiện chất lượng hình ảnh đầu vào.
- Xử lý Thuật toán (Algorithm Execution): Chip SoC/FPGA chạy các thuật toán Computer Vision đã được lập trình sẵn hoặc Mô hình học sâu (Inference) để trích xuất các đặc trưng và thông tin cần thiết (ví dụ: vị trí, kích thước, khuyết tật).
- Ra quyết định (Decision Making): Dựa trên kết quả phân tích, thiết bị Embedded Vision đưa ra một quyết định logic (ví dụ: OK/NG, Tọa độ X, Y) trong khoảng thời gian xác định.
- Truyền lệnh Điều khiển (Control Command): Quyết định được truyền đi dưới dạng tín hiệu I/O tốc độ cao hoặc qua giao thức mạng công nghiệp (ví dụ: Ethernet/IP) đến bộ điều khiển PLC hoặc robot, việc này kích hoạt hành động cơ học thời gian thực.

3. Ưu Điểm Chiến Lược và Lợi Ích Kinh Tế
3.1. Tối Ưu Hóa Tốc Độ và Độ Trễ (Latency)
Embedded Vision giải quyết triệt để vấn đề độ trễ (Latency) trong sản xuất tốc độ cao. Việc xử lý tại nguồn (Processing at the Source) giúp loại bỏ thời gian trễ do việc truyền dữ liệu hình ảnh thô qua mạng đến máy chủ trung tâm.
Hệ thống có thể đạt được tốc độ xử lý và phản hồi cực nhanh, thường là dưới 10ms (tùy thuộc vào độ phức tạp của thuật toán), điều này là cần thiết cho việc kiểm tra In-line các sản phẩm di chuyển nhanh. Phản hồi Real-time này cải thiện đáng kể độ chính xác của hệ thống, việc này đảm bảo rằng hành động điều khiển (ví dụ: loại bỏ sản phẩm lỗi) được thực hiện đúng thời điểm mà không bị trượt.
3.2. Tiết Kiệm Chi Phí và Năng Lượng
Việc sử dụng Embedded Vision mang lại những lợi ích kinh tế đáng kể so với việc sử dụng máy tính công nghiệp (PC-based vision) đắt đỏ.
- Giảm Chi phí Đầu tư (CAPEX): Thiết bị Embedded Vision có giá thành thấp hơn đáng kể so với việc mua sắm và bảo trì một máy tính công nghiệp cấu hình cao cần thiết để xử lý dữ liệu từ nhiều camera. Việc này tối ưu hóa chi phí đầu tư ban đầu cho các dự án tự động hóa quy mô lớn.
- Hiệu quả Năng lượng: Chip SoC và FPGA được thiết kế để tiêu thụ điện năng cực thấp, điều này giúp giảm chi phí vận hành (OPEX) lâu dài và đồng thời giảm nhu cầu về hệ thống làm mát phức tạp. Sự giảm thiểu tiêu thụ điện năng cũng góp phần vào mục tiêu sản xuất xanh (Green Manufacturing) của các Nhà máy Thông minh.
- Đơn giản hóa Triển khai: Kích thước nhỏ gọn cho phép lắp đặt nhanh chóng, giảm thiểu thời gian và chi phí liên quan đến việc thiết kế lại khu vực làm việc hoặc lắp đặt tủ điều khiển lớn.

3.3. Tính Linh Hoạt, Độ Bền và Bảo Mật
Thiết kế vật lý của Embedded Vision tăng cường tính linh hoạt và độ bền trong môi trường sản xuất khắc nghiệt. Tính linh hoạt được thể hiện qua khả năng lắp đặt trực tiếp trên các bộ phận chuyển động nhanh như cánh tay robot hoặc AGV/AMR do kích thước nhỏ gọn và trọng lượng nhẹ.
Độ bền công nghiệp là đặc điểm nổi bật, vì các thiết bị này được thiết kế để chịu đựng nhiệt độ cao, độ ẩm, bụi bẩn, và rung động mạnh mẽ (chịu rung, chống sốc), điều này đảm bảo hoạt động liên tục và độ lặp lại cao 24/7. Bảo mật là một ưu điểm chiến lược khác: dữ liệu hình ảnh nhạy cảm được xử lý cục bộ và không cần truyền đi trên mạng, việc này giảm thiểu rủi ro bị đánh cắp hoặc bị xâm nhập, giúp đảm bảo tuân thủ các quy định bảo mật dữ liệu công nghiệp.
4. Các Ứng Dụng Chuyên Biệt Của Embedded Vision Trong Sản Xuất
4.1. Kiểm Tra Chất Lượng và Phát Hiện Khuyết Điểm (Quality Inspection)
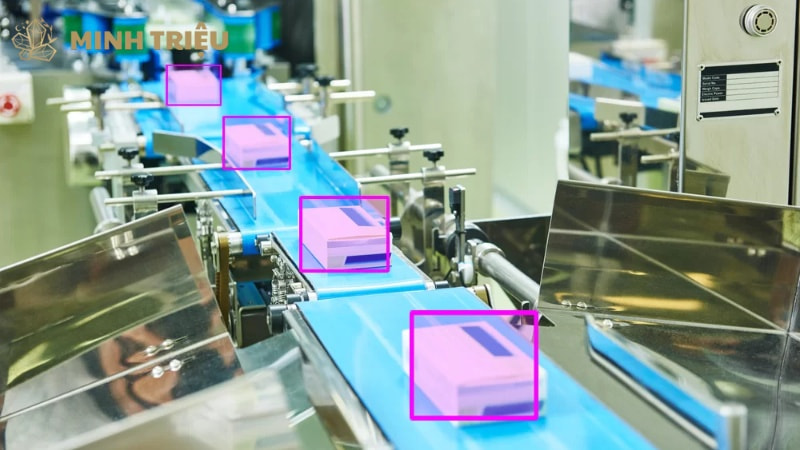
Embedded Vision đã trở thành công cụ không thể thiếu trong việc Kiểm tra Chất lượng sản phẩm với tốc độ xử lý cực nhanh. Hệ thống thực hiện phát hiện Khuyết tật Bề mặt Real-time trên các dây chuyền sản xuất hàng loạt (ví dụ: linh kiện điện tử, dược phẩm, bao bì). Ví dụ điển hình là việc kiểm tra các mối hàn, in ấn bao bì, hoặc các vết nứt nhỏ trên bề mặt kim loại.
Thiết bị sử dụng thuật toán Computer Vision được nhúng để phân loại các mẫu lỗi (như mờ, thiếu vật liệu, biến dạng) ngay khi hình ảnh được thu thập. Ưu điểm then chốt là khả năng duy trì độ chính xác và độ lặp lại cao ở tốc độ làm việc của băng tải, việc này loại bỏ lỗi do con người gây ra.
Các loại Khuyết điểm thường được phát hiện bởi Embedded Vision:
- Lỗi Hình học (Geometric Defects): Kiểm tra đo lường kích thước, đường kính, và sự biến dạng vượt quá dung sai cho phép.
- Lỗi Bề mặt (Surface Defects): Phát hiện các vết xước, lỗ khí (pinholes), bavia, hoặc sự không đồng đều của lớp phủ.
- Lỗi Nhận dạng (Identification Defects): Kiểm tra lỗi in ấn, nhãn dán sai, hoặc không khớp Mã Vạch/QR/DMC.
4.2. Hướng Dẫn Robot và Tự Động Hóa (Robot Guidance)
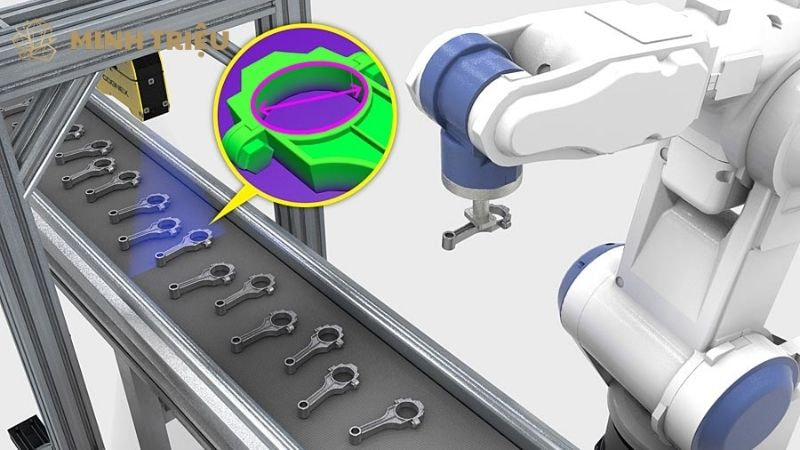
Embedded Vision đóng vai trò nền tảng sống còn trong việc Hướng dẫn Robot thực hiện các tác vụ thích ứng và di động. Đối với robot cộng tác (Cobots), mô-đun Embedded Vision được gắn trực tiếp trên cánh tay robot, việc này giúp nó định vị chi tiết trong không gian làm việc.
- Pick & Place linh hoạt: Hệ thống nhanh chóng xác định vị trí và hướng (orientation) của các chi tiết nhỏ đặt ngẫu nhiên hoặc bán kết cấu, từ đó cung cấp tọa độ Real-time cho robot để thực hiện thao tác gắp và đặt chính xác.
- Điều hướng Robot Di động (AMR/AGV): Embedded Vision cung cấp khả năng xác định vị trí và lập bản đồ đồng thời (SLAM – Simultaneous Localization and Mapping) mà không cần hạ tầng định vị bên ngoài. Hệ thống sử dụng camera nhúng để quét môi trường, nhận dạng các vật cản, và tính toán quỹ đạo di chuyển tối ưu, việc này đảm bảo an toàn và hiệu quả trong môi trường kho bãi phức tạp.
4.3. Giám sát và Theo Dõi Quá Trình (Process Monitoring)
Embedded Vision giúp mở rộng khả năng giám sát quy trình ngoài các thông số vật lý truyền thống. Hệ thống thực hiện việc theo dõi Trạng thái Thiết bị (Condition Monitoring) bằng cách phân tích hình ảnh của đồng hồ đo, màn hình HMI, hoặc đèn báo để xác nhận tình trạng hoạt động. Một ứng dụng quan trọng khác là Kiểm soát An toàn Vận hành.
Embedded Vision được triển khai tại các khu vực làm việc của robot để phát hiện sự xâm nhập của con người vào khu vực nguy hiểm. Việc này kích hoạt cơ chế dừng khẩn cấp thời gian thực, việc này tuân thủ các tiêu chuẩn an toàn công nghiệp. Sự kết hợp giữa Computer Vision và Deep Learning nhúng cho phép hệ thống phân biệt giữa vật thể vô hại và sự hiện diện của con người với độ chính xác cao.
4.4. Đo Lường và Kiểm Tra Mã (Metrology and Code Reading)
Đo lường Kích thước (Metrology) chính xác là một tác vụ được Embedded Vision thực hiện hiệu quả. Hệ thống xác định các thông số hình học (chiều dài, chiều rộng, độ cong) của sản phẩm để đảm bảo chúng nằm trong dung sai thiết kế (GD&T).
Ưu điểm nằm ở chỗ thiết bị nhúng có thể được hiệu chuẩn để đạt độ chính xác micron và thực hiện đo lường lặp đi lặp lại. Kiểm tra Mã (Code Reading) là một ứng dụng phổ biến khác. Embedded Vision đảm bảo tốc độ xử lý cao trong việc đọc và xác minh Mã Vạch 1D, Mã QR, và Mã Ma trận Dữ liệu (DMC), ngay cả trên các bề mặt khó đọc hoặc bị hỏng nhẹ.
Thuật toán nhúng thực hiện các bước tiền xử lý hình ảnh nâng cao để tăng cường độ tương phản và loại bỏ phản xạ, việc này tối đa hóa tỷ lệ đọc thành công và giúp duy trì truy xuất nguồn gốc (Traceability) sản phẩm.
5. Kết Luận
Tương lai của Embedded Vision gắn liền với sự trỗi dậy của Edge AI và hệ thống siêu tích hợp, nơi các AI Accelerators và kiến trúc Neuromorphic cho phép xử lý mô hình học sâu ngay tại biên với mức tiêu thụ năng lượng tối thiểu. Kết hợp cùng 5G/6G, công nghệ này mở rộng khả năng kết nối, cập nhật và quản lý từ xa, đưa trí tuệ nhân tạo vào từng điểm kiểm tra trên dây chuyền. Embedded Vision đã chứng minh vai trò sống còn nhờ phản hồi real-time, chi phí thấp, tính linh hoạt cao và bảo mật dữ liệu tại chỗ, trở thành bước tiến tất yếu để xây dựng Nhà máy Thông minh trong kỷ nguyên Công nghiệp 4.0.