
Biến tần
Công Nghệ Điều Khiển Động Cơ Không Cảm Biến: Tối Ưu Hóa Hiệu Suất Biến Tần

Biến tần là thiết bị quan trọng trong tự động hóa, giúp điều khiển tốc độ và mô-men xoắn động cơ, từ đó tối ưu hóa sản xuất và tiết kiệm năng lượng. Trước đây, các hệ thống truyền động thường cần cảm biến như encoder để đảm bảo độ chính xác. Tuy nhiên, công nghệ điều khiển không cảm biến (Sensorless Control) đã mở ra hướng đi mới, cho phép điều khiển chính xác mà không cần thiết bị phản hồi vật lý – giúp giảm chi phí, tăng độ tin cậy và đơn giản hóa hệ thống. Bài viết sẽ làm rõ khái niệm, nguyên lý hoạt động, lợi ích thực tiễn, các thách thức hiện nay và xu hướng phát triển của điều khiển không cảm biến.
1. Điều Khiển Động Cơ Không Cảm Biến Là Gì Và Tại Sao Lại Quan Trọng?
Tại sao công nghệ điều khiển động cơ không cảm biến lại trở thành một xu hướng quan trọng trong sản xuất công nghiệp? Công nghệ này mang lại nhiều lợi ích vượt trội so với các phương pháp điều khiển truyền thống.
1.1. Định nghĩa và nguyên lý cơ bản
Điều khiển động cơ không cảm biến (Sensorless control) là phương pháp điều khiển tốc độ và vị trí động cơ mà không cần sử dụng các cảm biến vật lý như encoder hoặc resolver. Thay vào đó, nó ước tính các thông số này dựa trên các đại lượng điện của động cơ như điện áp và dòng điện.
Nguyên lý cơ bản:
- Mô hình động cơ: Phương pháp này sử dụng mô hình toán học của động cơ để ước tính các thông số trạng thái như tốc độ, vị trí và từ thông.
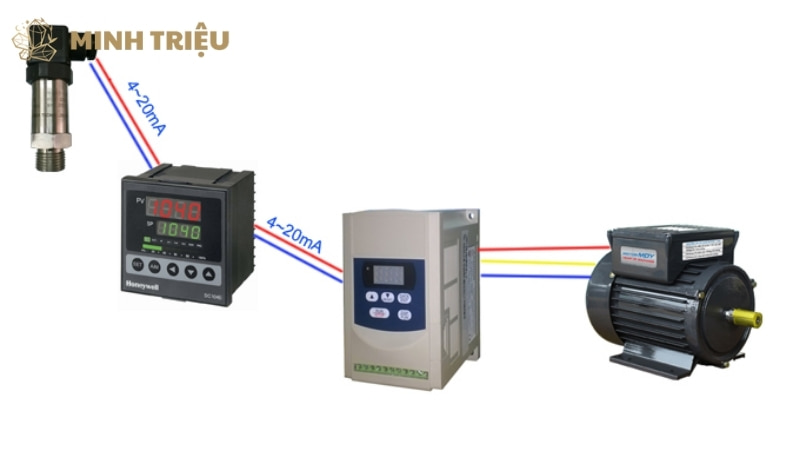
- Đo lường điện: Biến tần thu thập dữ liệu thời gian thực về điện áp và dòng điện của động cơ.
- Thuật toán ước lượng: Các thuật toán phức tạp (ví dụ: bộ quan sát Kalman, bộ quan sát trượt – Sliding Mode Observer) được áp dụng để so sánh giá trị đo lường với mô hình, từ đó ước tính chính xác tốc độ và vị trí.
1.2. Lợi ích vượt trội so với điều khiển có cảm biến
Việc triển khai điều khiển không cảm biến cho động cơ mang lại hàng loạt lợi ích chiến lược, chúng giúp doanh nghiệp tối ưu hóa hoạt động và nâng cao năng lực cạnh tranh.
- Giảm chi phí hệ thống: Công nghệ này loại bỏ nhu cầu mua sắm, lắp đặt và bảo trì các cảm biến vị trí đắt tiền (encoder, resolver).
- Tăng độ tin cậy và độ bền: Việc loại bỏ các cảm biến vật lý giúp giảm điểm lỗi tiềm ẩn, tăng khả năng hoạt động trong môi trường khắc nghiệt (rung động, bụi bẩn, nhiệt độ cao) và giảm chi phí bảo trì biến tần.
- Đơn giản hóa lắp đặt và đấu nối: Không cần đi dây tín hiệu cho cảm biến, giúp quá trình lắp đặt nhanh chóng và giảm thiểu lỗi đấu nối.
- Tiết kiệm không gian: Việc không có cảm biến giúp giảm kích thước tổng thể của động cơ và hệ thống điều khiển.
- Hoạt động trong môi trường khắc nghiệt: Công nghệ này đặc biệt phù hợp cho các ứng dụng nơi cảm biến dễ bị hỏng hoặc khó lắp đặt do điều kiện môi trường.
2. Các Nguyên Lý Và Thuật Toán Cốt Lõi Của Điều Khiển Không Cảm Biến
Các nguyên lý và thuật toán nào làm nên khả năng “không cảm biến” của biến tần? Chúng dựa trên việc ước lượng thông số động cơ từ các đại lượng điện.
2.1. Ước lượng tốc độ và vị trí
Ước lượng tốc độ và vị trí là trái tim của điều khiển không cảm biến, chúng cho phép biến tần “biết” trạng thái động cơ mà không cần phản hồi vật lý.
- Bộ quan sát từ thông (Flux Observer): Phương pháp này ước lượng từ thông rotor hoặc stator của động cơ, từ đó suy ra tốc độ và vị trí.
- Bộ quan sát trạng thái (State Observer): Phương pháp này sử dụng mô hình động học của động cơ và các phép đo điện để ước lượng toàn bộ trạng thái của động cơ.
- Phương pháp dựa trên điện áp phản điện động (Back-EMF based methods): Ở tốc độ cao, điện áp phản điện động (back-EMF) của động cơ tỷ lệ với tốc độ, có thể được sử dụng để ước lượng tốc độ.

2.2. Các thuật toán điều khiển chính
Các thuật toán điều khiển chính được sử dụng để xử lý dữ liệu ước lượng và điều khiển động cơ một cách hiệu quả.
- Điều khiển vector (Vector Control/FOC – Field Oriented Control): Thuật toán này tách biệt thành phần từ thông và mô-men xoắn của dòng điện động cơ, cho phép điều khiển chính xác như động cơ DC. Điều khiển không cảm biến thường được tích hợp vào FOC.
- Điều khiển trực tiếp mô-men xoắn (Direct Torque Control – DTC): Thuật toán này trực tiếp điều khiển từ thông và mô-men xoắn của động cơ mà không cần điều chế PWM phức tạp, có thể được áp dụng trong điều khiển không cảm biến.
- Thuật toán thích nghi và học máy (Adaptive and Machine Learning Algorithms): Các thuật toán này có thể tự điều chỉnh các tham số ước lượng để cải thiện độ chính xác trong các điều kiện vận hành khác nhau hoặc khi động cơ bị lão hóa.
2.3. Thách thức ở tốc độ thấp và giải pháp
Điều khiển không cảm biến thường gặp thách thức ở tốc độ thấp hoặc khi động cơ dừng, và các giải pháp đặc biệt cần được áp dụng.
Thách thức: Ở tốc độ thấp, điện áp phản điện động rất nhỏ hoặc bằng không, gây khó khăn cho việc ước lượng chính xác.
Giải pháp:
- Tiêm tín hiệu tần số cao (High-Frequency Injection): Phương pháp này tiêm một tín hiệu tần số cao vào động cơ và phân tích phản hồi để ước lượng vị trí rotor.
- Điều khiển vòng hở ở tốc độ thấp: Phương pháp này sử dụng điều khiển vòng hở (open-loop control) ở tốc độ rất thấp hoặc khi khởi động, sau đó chuyển sang điều khiển không cảm biến khi tốc độ đủ cao.

3. Ứng Dụng Thực Tiễn Của Điều Khiển Không Cảm Biến Trong Công Nghiệp
Điều khiển động cơ không cảm biến đang được ứng dụng rộng rãi trong nhiều ngành công nghiệp, chúng mang lại những cải tiến đáng kể về hiệu quả và năng suất.
3.1. Trong các ngành công nghiệp cụ thể
Công nghệ điều khiển không cảm biến đã chứng minh hiệu quả vượt trội trong nhiều lĩnh vực sản xuất khác nhau.
Bơm và Quạt:
- Công nghệ này tối ưu hóa hiệu suất và tiết kiệm năng lượng cho các hệ thống bơm và quạt trong các ứng dụng HVAC, cấp nước.
- Nó giảm chi phí lắp đặt và bảo trì do không cần cảm biến.
Hệ thống băng tải:
- Công nghệ này điều khiển tốc độ chính xác của băng tải mà không cần encoder, giảm chi phí và đơn giản hóa cơ khí.
- Nó cho phép hoạt động ổn định trong môi trường bụi bẩn, rung động.
Máy nén khí:
- Công nghệ này điều khiển tốc độ máy nén khí hiệu quả, tiết kiệm năng lượng.
- Nó tăng độ bền và giảm bảo trì do không có cảm biến.
Thiết bị gia dụng và công cụ điện: Nó giúp các thiết bị như máy giặt, máy hút bụi, máy khoan hoạt động êm ái, hiệu quả và bền hơn.
Robot và AGV đơn giản: Trong các ứng dụng robot hoặc xe tự hành (AGV) không yêu cầu độ chính xác vị trí tuyệt đối, điều khiển không cảm biến giúp giảm chi phí và độ phức tạp.

3.2. Cải thiện hiệu quả sản xuất tổng thể
Việc triển khai điều khiển không cảm biến góp phần cải thiện hiệu quả sản xuất tổng thể thông qua nhiều khía cạnh.
- Giảm chi phí đầu tư và vận hành: Việc loại bỏ cảm biến và đơn giản hóa lắp đặt dẫn đến giảm chi phí ban đầu và chi phí bảo trì.
- Tăng độ tin cậy hệ thống: Ít linh kiện hơn đồng nghĩa với ít điểm lỗi hơn, giúp hệ thống hoạt động ổn định và bền bỉ hơn.
- Tối ưu hóa không gian: Việc không cần cảm biến giúp giảm kích thước động cơ và biến tần do không cần không gian cho cảm biến và dây dẫn.
- Linh hoạt trong thiết kế: Công nghệ này cho phép thiết kế hệ thống truyền động linh hoạt hơn, dễ dàng tích hợp vào các ứng dụng khác nhau.
- Khắc phục sự cố đơn giản hơn: Ít linh kiện hơn giúp quá trình khắc phục sự cố biến tần trở nên đơn giản hơn.
4. Thách Thức Và Xu Hướng Phát Triển Tương Lai
Mặc dù mang lại nhiều lợi ích, công nghệ điều khiển không cảm biến vẫn đối mặt với một số thách thức, đồng thời chúng cũng đang định hình những xu hướng công nghệ mới trong tương lai của ngành công nghiệp.
4.1. Thách thức khi triển khai
Việc tích hợp điều khiển không cảm biến vào hệ thống hiện có không phải lúc nào cũng dễ dàng, đòi hỏi sự chuẩn bị kỹ lưỡng.
- Độ chính xác ở tốc độ thấp: Đây vẫn là thách thức lớn nhất, đặc biệt đối với các ứng dụng yêu cầu điều khiển chính xác ở tốc độ gần bằng 0.
- Phụ thuộc vào thông số động cơ: Hiệu suất điều khiển không cảm biến phụ thuộc nhiều vào độ chính xác của mô hình động cơ và các thông số (điện trở, điện cảm).
- Độ phức tạp của thuật toán: Các thuật toán ước lượng và điều khiển khá phức tạp, đòi hỏi bộ vi xử lý mạnh mẽ trong biến tần.
- Khả năng chống nhiễu: Hệ thống điều khiển không cảm biến nhạy cảm hơn với nhiễu điện từ (EMI) trên đường dây điện.
4.2. Xu hướng công nghệ tương lai
Tương lai của điều khiển không cảm biến sẽ tiếp tục phát triển mạnh mẽ, tích hợp sâu hơn các công nghệ mới để đạt được mức độ tối ưu hóa và hiệu quả cao hơn.
- Tích hợp AI và Machine Learning: Việc sử dụng AI và Machine Learning để cải thiện độ chính xác của ước lượng tốc độ/vị trí, đặc biệt ở tốc độ thấp và trong điều kiện tải thay đổi.
- Vật liệu bán dẫn tiên tiến (SiC/GaN): Việc ứng dụng SiC và GaN trong biến tần giúp tăng tần số chuyển mạch, cải thiện chất lượng dòng điện và độ chính xác của ước lượng.
- Cải thiện thuật toán ở tốc độ thấp: Nghiên cứu tiếp tục phát triển các thuật toán tiên tiến hơn để giải quyết triệt để thách thức điều khiển ở tốc độ thấp và khi khởi động.
- Tích hợp sâu vào biến tần: Công nghệ điều khiển không cảm biến sẽ được tích hợp sâu hơn vào phần cứng và phần mềm của biến tần, trở thành tính năng tiêu chuẩn.
- Ứng dụng rộng rãi hơn: Mở rộng ứng dụng sang các lĩnh vực đòi hỏi độ chính xác cao hơn như robot cộng tác, AGV phức tạp.
5. Kết Luận
Công nghệ điều khiển động cơ không cảm biến đang tái định hình cách vận hành hệ thống truyền động công nghiệp, mang lại lợi ích về chi phí, độ tin cậy và khả năng bảo trì. Đặc biệt phù hợp với các ứng dụng không yêu cầu độ chính xác cao ở tốc độ thấp, giải pháp này giúp đơn giản hóa hệ thống mà vẫn đảm bảo hiệu quả. Doanh nghiệp nên chủ động nghiên cứu và ứng dụng biến tần không cảm biến như một khoản đầu tư chiến lược cho quá trình nâng cấp hoặc triển khai mới, góp phần xây dựng hệ thống sản xuất linh hoạt, hiện đại và sẵn sàng cho kỷ nguyên công nghiệp 4.0.