
Biến tần
Hiệu Chỉnh Thông Số PID Trong Biến Tần: Tối Ưu Hóa Hiệu Suất Và Ổn Định Hệ Thống
Biến tần là thiết bị điều khiển tần số giúp điều chỉnh tốc độ động cơ và nâng cao hiệu suất hệ thống tự động hóa. Khi tích hợp chức năng điều khiển PID, biến tần có thể duy trì các thông số vận hành ổn định và tiết kiệm năng lượng. Bài viết sẽ làm rõ vai trò của việc hiệu chỉnh PID trong biến tần, ý nghĩa các thông số P-I-D, phương pháp điều chỉnh, lợi ích, thách thức và giải pháp nhằm đạt được hiệu quả điều khiển tối ưu.
1. Vai Trò Của PID Trong Biến Tần
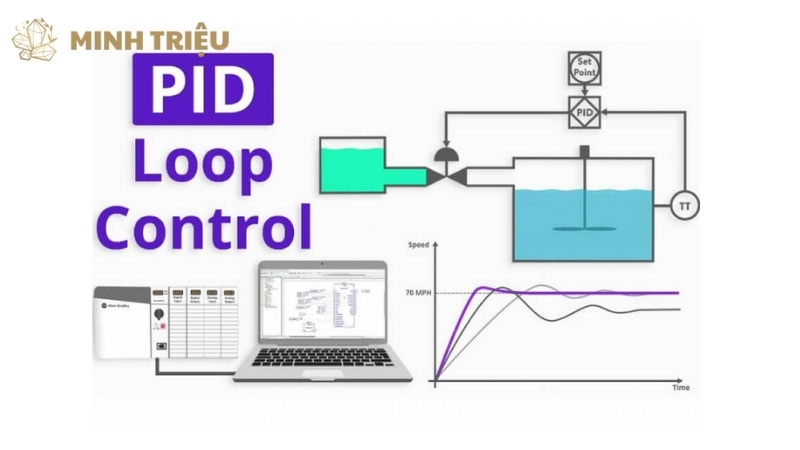
Bộ điều khiển PID (Proportional – Integral – Derivative) trong biến tần không chỉ giúp duy trì đầu ra ổn định theo giá trị đặt trước mà còn đóng vai trò như “bộ não điều khiển” giúp hệ thống thích ứng linh hoạt với mọi biến động trong quá trình vận hành. Thông qua cơ chế tự động tính toán sai số và điều chỉnh tần số đầu ra, PID đảm bảo động cơ hoạt động trơn tru, hạn chế dao động, giảm thời gian hồi đáp và loại bỏ sai số tĩnh hiệu quả.
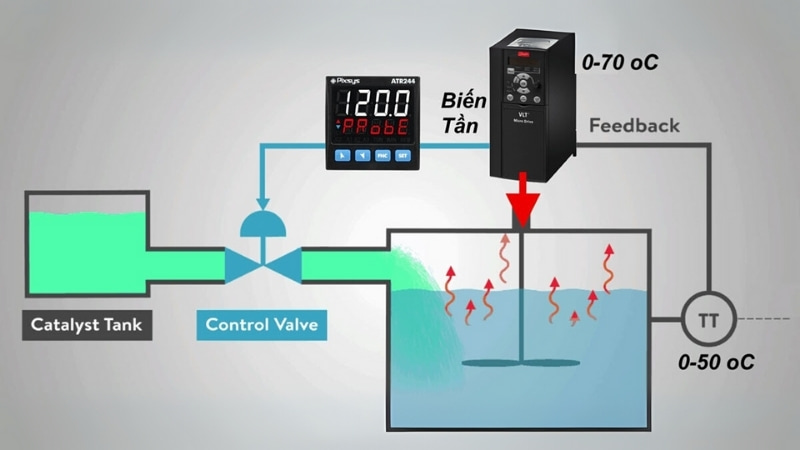
Trong các ứng dụng thực tế như điều khiển áp suất đường ống, duy trì mức nước trong bể, kiểm soát nhiệt độ lò sấy hay điều chỉnh tốc độ băng tải, PID giúp hệ thống luôn phản hồi chính xác và kịp thời. Điều này không chỉ nâng cao hiệu suất làm việc, tiết kiệm năng lượng mà còn góp phần kéo dài tuổi thọ thiết bị, giảm thiểu rủi ro hỏng hóc hoặc sự cố do quá tải hoặc vận hành không ổn định.
Bên cạnh đó, việc tích hợp PID trong biến tần còn giúp đơn giản hóa quá trình vận hành và bảo trì, đặc biệt phù hợp với xu hướng tự động hóa và chuyển đổi số trong sản xuất công nghiệp hiện đại. Nhờ đó, doanh nghiệp có thể tối ưu hóa chi phí, nâng cao năng suất và tăng khả năng cạnh tranh trên thị trường.
2. Các thông số PID và ý nghĩa
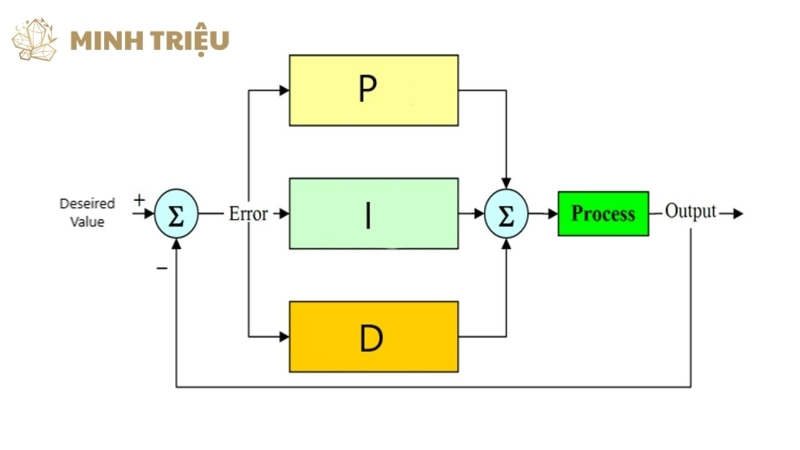
Bộ điều khiển PID (Proportional-Integral-Derivative) là một trong những hệ thống điều khiển phổ biến nhất trong kỹ thuật tự động hóa, được sử dụng rộng rãi trong các ứng dụng như kiểm soát nhiệt độ, tốc độ động cơ, áp suất, mức chất lỏng, và nhiều quy trình công nghiệp khác. PID hoạt động dựa trên ba thông số chính: P (Proportional), I (Integral), và D (Derivative). Mỗi thông số đóng góp một phần khác nhau để điều chỉnh đầu ra (output) nhằm giảm thiểu sai lệch (error) giữa giá trị đặt (setpoint) và giá trị thực tế (measured value hoặc process variable).
2.1. P (Proportional – Tỷ lệ)
P (Proportional – Tỷ lệ) là thông số đầu tiên trong bộ điều khiển PID, có ý nghĩa tác động tỷ lệ với sai lệch giữa giá trị đặt và giá trị thực tế của thông số điều khiển. Ảnh hưởng của P là tăng P làm tăng tốc độ phản ứng của hệ thống, giúp nhanh chóng đạt đến giá trị đặt, nhưng nếu quá lớn có thể gây ra dao động hoặc mất ổn định.
2.2. I (Integral – Tích phân)
I (Integral – Tích phân) là thông số thứ hai, có ý nghĩa tác động dựa trên tổng sai lệch theo thời gian, với mục tiêu chính là loại bỏ sai lệch tĩnh (offset) giữa giá trị đặt và giá trị thực tế. Ảnh hưởng của I là tăng I giúp loại bỏ hoàn toàn sai lệch tĩnh nhưng có thể làm chậm phản ứng của hệ thống và gây ra hiện tượng quá đà (overshoot) khi đạt đến giá trị đặt.
2.3. D (Derivative – Đạo hàm)
D (Derivative – Đạo hàm) là thông số thứ ba, có ý nghĩa tác động dựa trên tốc độ thay đổi của sai lệch, dự đoán tương lai của sai lệch để đưa ra phản ứng điều khiển. Ảnh hưởng của D là tăng D giúp giảm dao động, tăng độ ổn định của hệ thống, đặc biệt hữu ích khi có sự thay đổi đột ngột, nhưng nó cũng rất nhạy cảm với nhiễu trong tín hiệu phản hồi.
2.4. Mối quan hệ giữa các thông số
Mối quan hệ giữa các thông số P, I, D là sự tương tác phức tạp để tạo ra phản ứng điều khiển tổng thể của hệ thống.
- P cung cấp lực điều khiển chính, phản ứng tức thì với sai lệch.
- I loại bỏ sai lệch tích lũy theo thời gian, đảm bảo hệ thống đạt được giá trị đặt chính xác.
- D dự đoán xu hướng sai lệch, giúp giảm dao động và cải thiện độ ổn định. Việc hiệu chỉnh chúng đòi hỏi sự cân bằng để đạt được phản ứng mong muốn: nhanh, ổn định và không có sai lệch tĩnh.
3. Các phương pháp Hiệu chỉnh thông số PID trong biến tần
Để tối ưu PID biến tần, có nhiều phương pháp hiệu chỉnh khác nhau, từ thủ công đến tự động và dựa trên mô phỏng.
3.1. Phương pháp thử và sai (Trial and Error)
Phương pháp thử và sai có đặc điểm là điều chỉnh thủ công từng thông số P, I, D và quan sát phản ứng của hệ thống. Ưu điểm của nó là đơn giản, không yêu cầu công cụ phức tạp, nhưng nhược điểm là tốn thời gian, yêu cầu kinh nghiệm đáng kể và có thể không đạt được kết quả tối ưu.
3.2. Phương pháp Ziegler-Nichols
Phương pháp Ziegler-Nichols có đặc điểm là dựa trên việc tìm điểm dao động liên tục của hệ thống để tính toán các thông số PID ban đầu. Ưu điểm là có cấu trúc, cung cấp một điểm xuất phát tốt cho việc hiệu chỉnh, nhưng nhược điểm là có thể không phù hợp cho mọi loại hệ thống hoặc điều kiện tải.
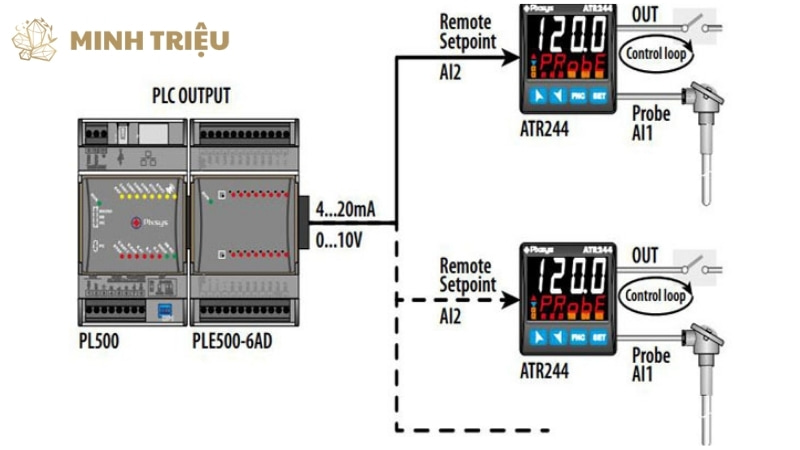
3.3. Sử dụng chức năng tự động hiệu chỉnh (Auto-tuning) của biến tần
Sử dụng chức năng tự động hiệu chỉnh (Auto-tuning) của biến tần có đặc điểm là biến tần tự động thực hiện các thử nghiệm nội bộ để tính toán thông số PID tối ưu. Ưu điểm của phương pháp này là nhanh chóng, tiện lợi, phù hợp cho người dùng không chuyên, nhưng nhược điểm là kết quả có thể không hoàn hảo trong mọi điều kiện tải phức tạp hoặc môi trường có nhiều nhiễu.

3.4. Sử dụng phần mềm mô phỏng và công cụ chuyên dụng
Sử dụng phần mềm mô phỏng và công cụ chuyên dụng có đặc điểm là mô phỏng hệ thống trong môi trường ảo để tìm thông số PID, sau đó áp dụng vào biến tần. Ưu điểm là chính xác, an toàn (không ảnh hưởng đến thiết bị thực), hiệu quả cho hệ thống phức tạp, nhưng nhược điểm là yêu cầu phần mềm và kiến thức chuyên sâu để vận hành.
4. Lợi ích khi Hiệu chỉnh thông số PID trong biến tần hiệu quả
Việc hiệu chỉnh thông số PID trong biến tần một cách hiệu quả mang lại nhiều lợi ích chiến lược, từ cải thiện chất lượng đến tiết kiệm chi phí.
4.1. Cải thiện chất lượng sản phẩm
Hiệu chỉnh thông số PID trong biến tần cải thiện chất lượng sản phẩm bằng cách duy trì quy trình ổn định. Điều này giảm biến động của các thông số quan trọng, đảm bảo chất lượng sản phẩm đầu ra đồng đều. Khả năng này trực tiếp góp phần giảm phế phẩm, hạn chế sản phẩm lỗi do điều kiện vận hành không ổn định.
4.2. Giảm tiêu thụ năng lượng
Hiệu chỉnh thông số PID trong biến tần giảm tiêu thụ năng lượng bằng cách đảm bảo vận hành tối ưu. Động cơ chạy đúng tốc độ và áp suất cần thiết, tránh lãng phí năng lượng. Khả năng này còn tối ưu hóa hiệu suất, đạt được hiệu suất cao nhất với mức tiêu thụ năng lượng thấp nhất, từ đó tiết kiệm năng lượng biến tần đáng kể.
4.3. Tăng năng suất và hiệu quả vận hành
Hiệu chỉnh thông số PID trong biến tần tăng năng suất và hiệu quả vận hành bằng cách đảm bảo thời gian phản ứng nhanh. Hệ thống đáp ứng kịp thời các thay đổi trong quy trình. Khả năng này còn góp phần giảm thời gian chết, ít lỗi và ít dao động, giảm nhu cầu can thiệp thủ công.
4.4. Nâng cao độ tin cậy của hệ thống
Hiệu chỉnh thông số PID trong biến tần nâng cao độ tin cậy của hệ thống bằng cách giảm áp lực lên thiết bị. Hệ thống hoạt động ổn định, ít quá tải. Khả năng này còn góp phần kéo dài tuổi thọ thiết bị, giảm chi phí bảo trì và thay thế, từ đó tăng cường độ bền tổng thể.
5. Thách thức và Giải pháp khi Hiệu chỉnh thông số PID trong biến tần
Hiệu chỉnh thông số PID trong biến tần có thể đối mặt với một số thách thức, nhưng cũng có các giải pháp hiệu quả để vượt qua.
5.1. Thách thức
Các thách thức chính bao gồm:
- Độ phức tạp của quy trình: Việc hiểu rõ động lực học của hệ thống (quán tính, độ trễ, phi tuyến tính) là một thách thức lớn.
- Ảnh hưởng của nhiễu và tải: Các yếu tố bên ngoài như nhiễu điện từ hoặc thay đổi tải đột ngột có thể làm sai lệch kết quả hiệu chỉnh.
- Yêu cầu về kinh nghiệm: Cần người có chuyên môn và kinh nghiệm thực tế để hiệu chỉnh thông số PID trong biến tần một cách tối ưu.
- Rủi ro khi hiệu chỉnh sai: Hiệu chỉnh sai có thể gây mất ổn định hệ thống, dao động quá mức, hoặc thậm chí hư hỏng thiết bị.
5.2. Giải pháp
Để đảm bảo hiệu chỉnh PID hiệu quả, cần áp dụng các chiến lược toàn diện, kết hợp giữa phân tích kỹ thuật, công cụ hỗ trợ và đào tạo con người. Dưới đây là phân tích chi tiết từng giải pháp:
- Phân tích hệ thống kỹ lưỡng: Đây là bước nền tảng trước khi bắt đầu hiệu chỉnh PID, nhằm hiểu rõ đặc tính tải, quán tính, độ trễ và các yếu tố động học khác của hệ thống để có cái nhìn tổng thể. Mỗi hệ thống biến tần điều khiển động cơ hoặc quy trình sản xuất đều có đặc tính riêng, chẳng hạn như tải thay đổi đột ngột. Nếu không phân tích kỹ, việc đặt giá trị PID có thể dẫn đến phản ứng không phù hợp, như overshoot hoặc dao động kéo dài.
- Sử dụng bộ lọc nhiễu: Triển khai các bộ lọc nhiễu (ví dụ: bộ lọc thông thấp) để giảm ảnh hưởng của nhiễu lên tín hiệu phản hồi, giúp thông số D hoạt động hiệu quả hơn.
- Đào tạo chuyên sâu: Nâng cao kỹ năng cho kỹ thuật viên thông qua các khóa đào tạo chuyên sâu về chức năng PID biến tần và các phương pháp hiệu chỉnh.
- Bắt đầu với các giá trị an toàn: Thực hiện hiệu chỉnh từng bước, có kiểm soát, bắt đầu với các giá trị PID nhỏ và tăng dần để tránh gây mất ổn định đột ngột.
6. Kết luận
Bộ điều khiển PID (Proportional-Integral-Derivative) là một công cụ quan trọng trong hệ thống điều khiển vòng kín, đặc biệt khi được tích hợp trong biến tần (inverter). Biến tần, với vai trò điều chỉnh tốc độ động cơ và các thông số vận hành, kết hợp với PID giúp tối ưu hóa hiệu suất, đảm bảo sự ổn định và tiết kiệm năng lượng cho các hệ thống sản xuất. Bài viết này sẽ phân tích chi tiết hơn về hiệu chỉnh PID trong biến tần, vai trò cốt lõi của nó, các lợi ích cụ thể, và xu hướng phát triển trong tương lai, đặc biệt trong bối cảnh Công nghiệp 4.0.