
Robot công nghiệp
Cánh Tay Robot 6 Bậc Tự Do: Mọi Điều Bạn Cần Biết Từ A-Z
Cập nhật lần cuối 23 Tháng 7, 2025 bởi
Trong kỷ nguyên của cuộc Cách mạng Công nghiệp 4.0, tự động hóa không còn là một lựa chọn mà đã trở thành yếu tố sống còn quyết định năng lực cạnh tranh của mọi doanh nghiệp.
Giữa vô số công nghệ đột phá, cánh tay robot 6 bậc tự do nổi lên như một biểu tượng của sự linh hoạt, chính xác và hiệu quả, đóng vai trò là xương sống cho các hệ thống sản xuất thông minh trên toàn cầu.
Đây là một thiết bị cơ điện tử có khả năng mô phỏng gần như hoàn hảo chuyển động phức tạp của cánh tay người, cho phép nó thực hiện một loạt các tác vụ từ đơn giản đến tinh vi trong không gian ba chiều mà các loại robot khác không thể sánh được.
Với sáu trục quay độc lập, cỗ máy này có thể vươn tới, xoay và định vị một công cụ hoặc vật thể tại bất kỳ điểm nào với bất kỳ hướng nào trong phạm vi hoạt động của nó, mở ra một chân trời mới cho các ứng dụng công nghiệp.
Bài viết này sẽ là một cuốn cẩm nang toàn diện, dẫn dắt bạn đi sâu vào thế giới của cánh tay robot 6 bậc tự do.
Chúng ta sẽ cùng nhau giải mã khái niệm “6 bậc tự do” để hiểu rõ tại sao nó lại là yếu tố tạo nên sự khác biệt.
Tiếp đó, bài viết sẽ phân tích chi tiết từng bộ phận trong cấu tạo và nguyên lý hoạt động cốt lõi của robot.
Quan trọng hơn, chúng ta sẽ khám phá những ưu điểm vượt trội và các ứng dụng đột phá của công nghệ này trong hàng loạt ngành công nghiệp then chốt, từ sản xuất ô tô, điện tử cho đến y tế và logistics.
Cuối cùng, bài viết sẽ cung cấp một hướng dẫn thực tiễn giúp bạn lựa chọn sản phẩm phù hợp nhất với nhu cầu, đi kèm các khoảng giá tham khảo và trả lời những câu hỏi thường gặp, đảm bảo bạn có được cái nhìn 360 độ và đầy đủ nhất trước khi đưa ra quyết định đầu tư chiến lược này.
Nền tảng về Cánh tay Robot Công nghiệp
Robot 6 trục là giải pháp linh hoạt hàng đầu, nhưng nó chỉ là một phần của hệ sinh thái robot công nghiệp. Đọc bài viết tổng quan để có cái nhìn toàn cảnh.
Cánh Tay Robot 6 Bậc Tự Do Là Gì?
Cánh tay robot 6 bậc tự do, hay còn gọi là robot 6 trục (6-axis robot), là một loại robot công nghiệp có cấu trúc chuỗi động học mở bao gồm sáu khớp quay, cho phép bộ công tác cuối (end-effector) của nó có thể di chuyển và định hướng một cách tự do trong không gian ba chiều.
Mỗi khớp đại diện cho một “bậc tự do” (Degree of Freedom – DoF), và sự kết hợp của sáu bậc tự do này mang lại cho robot khả năng tiếp cận một điểm từ nhiều góc độ khác nhau, thực hiện các đường đi phức tạp và thao tác với các vật thể ở những vị trí hiểm hóc.
Điều này làm cho chúng trở thành công cụ tự động hóa linh hoạt và được ứng dụng rộng rãi nhất trong sản xuất hiện đại.
“6 Bậc Tự Do” (6 DoF) – Yếu Tố Tạo Nên Sự Khác Biệt
Sự ưu việt của một cánh tay robot 6 bậc nằm chính ở khả năng chuyển động toàn diện được quyết định bởi sáu bậc tự do của nó.
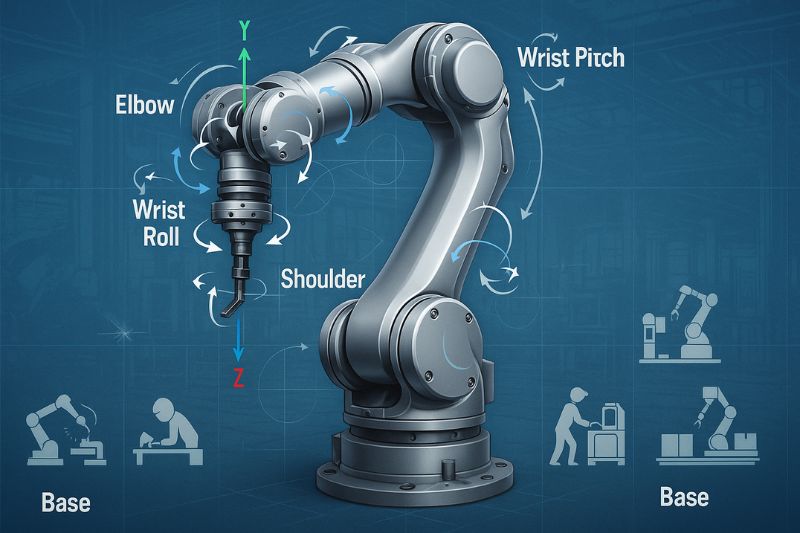
Các bậc tự do này không chỉ đơn thuần là sáu khớp nối, mà chúng đại diện cho sáu loại chuyển động độc lập mà robot có thể thực hiện, mô phỏng theo các chuyển động chính của vai, khuỷu tay và cổ tay của con người.
Cụ thể, sáu bậc tự do này bao gồm:
- Ba bậc tự do tịnh tiến (Translational Freedom): Cho phép robot di chuyển bộ công tác cuối đến bất kỳ vị trí nào trong không gian làm việc.
- Trục 1 (Xoay đế – Waist/Base Rotation): Cho phép toàn bộ cánh tay quay quanh một trục thẳng đứng, tương tự như việc xoay người ở hông.
- Trục 2 (Nâng hạ vai – Shoulder Flexion/Extension): Cho phép cánh tay chính gập lên hoặc duỗi xuống, tương tự như chuyển động nâng hạ của vai.
- Trục 3 (Gập duỗi khuỷu tay – Elbow Flexion/Extension): Cho phép phần cẳng tay gập lại hoặc duỗi ra so với phần cánh tay trên, mô phỏng khớp khuỷu tay.
- Ba bậc tự do định hướng (Orientational Freedom): Cho phép robot định hướng bộ công tác cuối theo bất kỳ góc nào.
- Trục 4 (Xoay cổ tay – Wrist Roll): Cho phép phần cổ tay quay tròn, tương tự như việc vặn một cái tuốc nơ vít.
- Trục 5 (Gập ngửa cổ tay – Wrist Pitch/Bend): Cho phép cổ tay gập lên hoặc ngửa ra, tương tự như việc vẫy tay.
- Trục 6 (Nghiêng cổ tay – Wrist Yaw): Cho phép cổ tay nghiêng qua hai bên.
Sự kết hợp nhuần nhuyễn của sáu trục này mang lại một lợi thế cạnh tranh tuyệt đối so với các robot có ít bậc tự do hơn.
Bảng 1: So sánh khả năng của Robot theo số Bậc Tự Do (DoF)
| Số Bậc Tự Do (DoF) | Khả Năng Chuyển Động & Định Hướng | Hạn Chế Chính | Ứng Dụng Tiêu Biểu |
|---|---|---|---|
| 4 Bậc (4-Axis) | Chuyển động tịnh tiến (X, Y, Z) và một trục quay (thường là ở cổ tay). | Không thể nghiêng hoặc ngửa bộ công tác cuối.
Chỉ tiếp cận vật thể từ một hướng (thường là từ trên xuống). |
Gắp và đặt (Pick & Place) tốc độ cao, đóng gói, bốc xếp lên pallet (Palletizing). |
| 5 Bậc (5-Axis) | Bổ sung thêm một trục quay ở cổ tay (Pitch hoặc Yaw). | Vẫn còn hạn chế trong việc định hướng.
Gặp khó khăn khi cần tiếp cận các bề mặt cong hoặc các góc phức tạp. |
Hàn hồ quang đơn giản, phun sơn các bề mặt không quá phức tạp, cấp phôi cho máy. |
| 6 Bậc (6-Axis) | Chuyển động và định hướng hoàn toàn tự do trong không gian 3D. | Chi phí đầu tư ban đầu cao hơn và lập trình có thể phức tạp hơn. | Hàn điểm, lắp ráp tinh vi, sơn các chi tiết phức tạp, gia công cơ khí, phẫu thuật. |
Rõ ràng, robot 6 bậc tự do cung cấp một giải pháp toàn diện, có khả năng xử lý các công việc đòi hỏi sự khéo léo và khả năng thích ứng cao nhất, điều mà các robot 4 hoặc 5 bậc không thể thực hiện được.
Cấu Tạo & Nguyên Lý Hoạt Động
Để vận hành một cách chính xác và mạnh mẽ, một cánh tay robot 6 bậc tự do được cấu thành từ nhiều bộ phận cơ khí và điện tử tinh vi, phối hợp với nhau một cách nhịp nhàng.
Việc hiểu rõ cấu tạo và nguyên lý hoạt động của nó là bước đầu tiên để có thể khai thác tối đa tiềm năng của thiết bị.
Các bộ phận chính của một cánh tay robot 6 bậc
Mỗi cánh tay robot công nghiệp 6 trục điển hình bao gồm các thành phần cốt lõi sau đây, mỗi bộ phận đóng một vai trò không thể thiếu trong hệ thống tổng thể:
- Đế (Base):
- Là bộ phận nền tảng, thường được bắt vít chắc chắn xuống sàn nhà, tường, hoặc trần nhà.
- Đế chứa động cơ cho trục đầu tiên và là điểm khởi đầu của toàn bộ chuỗi động học, đảm bảo sự ổn định cho robot trong quá trình vận hành.
- Các khớp (Joints):
- Là các cơ cấu quay cho phép chuyển động tương đối giữa các thanh nối.
- Một robot 6 bậc tự do có chính xác sáu khớp, mỗi khớp được dẫn động bởi một động cơ servo có độ chính xác cao, cho phép kiểm soát chính xác vị trí, tốc độ và mô-men xoắn.
- Các thanh nối (Links):
- Là những phần thân cứng, kết nối các khớp với nhau.
- Chiều dài và hình dạng của các thanh nối quyết định đến tầm với và không gian làm việc tổng thể của robot.
- Bộ công tác cuối (End-Effector – EOAT):
- Đây là “bàn tay” của robot, bộ phận trực tiếp tương tác với sản phẩm hoặc môi trường làm việc.
- Bộ công tác cuối có thể thay đổi linh hoạt tùy theo ứng dụng, ví dụ như:
- Tay gắp (Gripper): cơ khí, chân không, từ tính…
- Mỏ hàn (Welding Gun): hàn điểm, hàn hồ quang…
- Đầu phun sơn (Spray Gun)
- Dụng cụ gia công (Spindle, Deburring Tool)
- Hệ thống camera (Vision System)
- Tủ điều khiển (Controller):
- Được ví như “bộ não” của robot, đây là một máy tính công nghiệp mạnh mẽ chứa phần mềm điều khiển, các bộ khuếch đại công suất cho động cơ và các mạch giao tiếp I/O.
- Tủ điều khiển thực hiện các phép tính động học phức tạp để chuyển đổi lệnh của người dùng thành chuyển động chính xác của các khớp.
- Thiết bị dạy học (Teach Pendant):
- Là một thiết bị cầm tay có màn hình và các nút bấm, được kết nối với tủ điều khiển.
- Nó cho phép các kỹ sư, lập trình viên di chuyển robot bằng tay, ghi lại các vị trí (điểm), và viết các chương trình hoạt động cho robot một cách trực quan.
Nguyên lý hoạt động
Nguyên lý hoạt động của cánh tay robot 6 bậc tự do dựa trên sự phối hợp giữa phần mềm và phần cứng.
Quá trình này bắt đầu khi người vận hành sử dụng Teach Pendant để tạo ra một chương trình.
Khi chương trình được thực thi, tủ điều khiển sẽ tiếp nhận các lệnh này.
Phần mềm bên trong tủ điều khiển sử dụng các thuật toán động học nghịch (Inverse Kinematics) để tính toán góc quay cần thiết cho mỗi khớp.
Sau đó, tủ điều khiển gửi tín hiệu điện chính xác đến các bộ khuếch đại (servo drives) để cấp nguồn cho các động cơ servo tại mỗi khớp.
Các bộ mã hóa (encoder) tích hợp trong động cơ liên tục gửi tín hiệu phản hồi về vị trí thực tế của khớp về lại tủ điều khiển, tạo thành một vòng lặp kín (closed-loop control) để đảm bảo robot di chuyển với độ chính xác và lặp lại cực cao, thường chỉ ở mức phần trăm milimét.
Ưu Điểm Vượt Trội Của Cánh Tay Robot 6 Bậc Tự Do
Sự phổ biến rộng rãi của cánh tay robot 6 bậc tự do trong môi trường công nghiệp không phải là ngẫu nhiên, mà xuất phát từ những lợi thế cạnh tranh mang tính đột phá mà chúng mang lại cho quy trình sản xuất.
- Độ linh hoạt tối đa:
- Đây là ưu điểm nổi bật nhất.
- Khả năng mô phỏng hoàn hảo chuyển động của vai, khuỷu tay và cổ tay người giúp robot có thể thực hiện các tác vụ phức tạp như hàn các đường cong, sơn các bề mặt lồi lõm, hoặc lắp ráp các chi tiết trong không gian chật hẹp mà các loại robot khác không thể làm được.
- Phạm vi ứng dụng rộng lớn:
- Chính nhờ sự linh hoạt vượt trội, một cánh tay robot 6 bậc có thể được tái sử dụng cho nhiều công đoạn sản xuất khác nhau chỉ bằng cách thay đổi bộ công tác cuối và lập trình lại.
- Điều này giúp doanh nghiệp tối ưu hóa vốn đầu tư và dễ dàng thay đổi dây chuyền sản xuất.
- Độ chính xác và lặp lại cao:
- Robot được thiết kế để thực hiện cùng một tác vụ hàng nghìn lần với sai số gần như bằng không.
- Độ lặp lại (repeatability) của các robot hiện đại có thể đạt tới ±0.02mm.
- Sự nhất quán này loại bỏ các lỗi do con người gây ra, đảm bảo chất lượng sản phẩm đầu ra luôn đồng đều và giảm thiểu phế phẩm.
- Tăng năng suất, giảm chi phí nhân công:
- Robot có thể hoạt động liên tục 24/7 mà không cần nghỉ ngơi, không bị ảnh hưởng bởi sự mệt mỏi hay cảm xúc, giúp tăng đáng kể sản lượng.
- Đồng thời, việc tự động hóa các công việc lặp đi lặp lại, nặng nhọc hoặc nguy hiểm giúp giải phóng con người và giảm thiểu rủi ro tai nạn lao động.
Ứng Dụng Đột Phá Trong Các Ngành Công Nghiệp
Với khả năng vô song của mình, cánh tay robot 6 bậc tự do đã và đang tạo ra một cuộc cách mạng trong nhiều lĩnh vực sản xuất và dịch vụ, trở thành một công cụ không thể thiếu để nâng cao hiệu quả và chất lượng.
Ngành sản xuất Ô tô
Ngành công nghiệp ô tô là một trong những lĩnh vực tiên phong và ứng dụng robot 6 trục nhiều nhất.
Chúng thực hiện các công việc đòi hỏi sức mạnh, tốc độ và độ chính xác cao như hàn điểm (spot welding) và hàn hồ quang (arc welding) trên khung xe.
Trong công đoạn sơn, robot có thể di chuyển đầu phun theo các đường cong phức tạp của thân xe.
Ngoài ra, chúng còn được dùng trong việc lắp ráp các bộ phận như cửa xe, kính chắn gió, và động cơ.
Ngành Điện tử
Trong ngành công nghiệp điện tử, nơi độ chính xác là yếu tố sống còn, cánh tay robot 6 bậc thực hiện việc lắp ráp các vi mạch, gắn chip lên bo mạch (PCB), và kiểm tra chất lượng sản phẩm với tốc độ và độ chính xác mà con người không thể đạt được.
Ngành Thực phẩm & Đồ uống
Robot 6 bậc đảm nhận các công việc như gắp và đặt (pick and place) sản phẩm vào khay, hộp với tốc độ cực nhanh.
Chúng cũng được sử dụng rộng rãi trong việc đóng gói sản phẩm vào thùng carton và bốc xếp các thùng hàng lên pallet một cách tự động.
Ngành Logistics & Kho bãi
Tại các trung tâm phân phối và kho hàng thông minh, robot 6 trục thực hiện việc lấy hàng từ các kệ cao, phân loại bưu kiện dựa trên mã vạch, và sắp xếp hàng hóa, giúp tăng tốc độ xử lý đơn hàng và giảm thiểu sai sót.
Ngành Gia công kim loại
Trong các xưởng cơ khí, robot 6 bậc thực hiện công việc cấp phôi vào máy và lấy sản phẩm ra một cách tự động và liên tục (machine tending).
Ngoài ra, chúng còn được sử dụng cho các công đoạn hoàn thiện sản phẩm như mài bavia, đánh bóng bề mặt.
Ngành Y tế
Các hệ thống robot phẫu thuật như Da Vinci sử dụng các cánh tay robot thu nhỏ để thực hiện các ca mổ xâm lấn tối thiểu.
Trong các phòng xét nghiệm, chúng tự động hóa việc xử lý hàng nghìn mẫu bệnh phẩm, tăng tốc độ và độ tin cậy của kết quả chẩn đoán.
Hướng Dẫn Lựa Chọn Cánh Tay Robot 6 Bậc Tự Do Phù Hợp
Việc lựa chọn một cánh tay robot phù hợp là một quyết định quan trọng, ảnh hưởng trực tiếp đến hiệu quả của dự án tự động hóa.
Quá trình này đòi hỏi sự phân tích kỹ lưỡng về yêu cầu ứng dụng và cân nhắc nhiều yếu tố.
Bước 1: Phân tích yêu cầu ứng dụng
Đây là bước nền tảng quan trọng nhất.
Bạn phải xác định rõ ràng các yếu tố kỹ thuật của robot bạn cần.
Bảng 2: Các Thông Số Kỹ Thuật Quan Trọng Khi Lựa Chọn Robot
| Thông Số | Mô Tả Chi Tiết | Câu Hỏi Cần Trả Lời |
|---|---|---|
| Tải trọng (Payload) | Là tổng khối lượng tối đa mà robot có thể mang ở cổ tay, bao gồm cả khối lượng của bộ công tác cuối (EOAT) và vật thể cần thao tác. | Vật nặng nhất mà robot cần nâng là bao nhiêu kg? Bộ công tác cuối (tay gắp, đầu hàn…) nặng bao nhiêu? |
| Tầm với (Reach) | Là khoảng cách xa nhất tính từ tâm của đế robot đến tâm của mặt bích cổ tay (trục 6).
Tầm với quyết định không gian làm việc của robot. |
Điểm xa nhất mà robot cần tiếp cận là ở đâu? Không gian lắp đặt robot có bị giới hạn không? |
| Tốc độ (Speed) | Là tốc độ di chuyển tối đa của các khớp (thường tính bằng độ/giây) hoặc tốc độ của điểm trung tâm công cụ (TCP). | Chu kỳ thời gian (cycle time) cho một thao tác là bao nhiêu giây? Tốc độ có phải là yếu tố ưu tiên hàng đầu không? |
| Độ chính xác & Lặp lại (Accuracy & Repeatability) | Độ chính xác là khả năng robot đi đến một điểm đã được lập trình.
Độ lặp lại là khả năng robot quay trở lại cùng một vị trí nhiều lần. Độ lặp lại thường quan trọng hơn trong hầu hết các ứng dụng. |
Ứng dụng có đòi hỏi độ chính xác cực cao (như lắp ráp điện tử) hay không? Sai số cho phép là bao nhiêu mm? |
| Môi trường làm việc | Là điều kiện nơi robot sẽ được lắp đặt.
Một số môi trường đòi hỏi robot phải có cấp bảo vệ (IP rating) đặc biệt. |
Robot sẽ làm việc trong phòng sạch, môi trường ẩm ướt, nhiệt độ cao, có hóa chất, hay môi trường dễ cháy nổ không? |
Bước 2: Tìm hiểu các thương hiệu uy tín
Thị trường robot công nghiệp có sự góp mặt của nhiều nhà sản xuất lớn với những thế mạnh riêng.
Bảng 3: So Sánh Sơ Bộ Các Thương Hiệu Robot Hàng Đầu
| Thương Hiệu | Xuất Xứ | Thế Mạnh Nổi Bật | Dòng Sản Phẩm Tiêu Biểu |
|---|---|---|---|
| FANUC | Nhật Bản | Thị phần số 1 thế giới, cực kỳ bền bỉ và đáng tin cậy.
Rất mạnh trong ứng dụng cho máy CNC (machine tending). |
Dòng LR Mate (nhỏ), M-Series (trung bình), R-2000 (lớn). |
| ABB | Thụy Sĩ | Tiên phong trong công nghệ robot, phần mềm điều khiển mạnh mẽ (RobotStudio), dải sản phẩm rất rộng. | IRB series, GoFa & SWIFTI (Cobot). |
| KUKA | Đức | Chất lượng cơ khí hàng đầu của Đức, mạnh về các ứng dụng tải trọng nặng và yêu cầu độ chính xác cao. | Dòng KR AGILUS (nhỏ), KR CYBERTECH (trung bình), KR QUANTEC (nặng). |
| Yaskawa (Motoman) | Nhật Bản | Rất mạnh trong các ứng dụng hàn và sơn.
Nổi tiếng về tốc độ và hiệu suất. |
Dòng GP-Series (đa dụng), AR-Series (hàn), MPX-Series (sơn). |
| Universal Robots | Đan Mạch | Tiên phong và dẫn đầu thế giới về robot cộng tác (cobot).
Cực kỳ dễ lập trình và triển khai. |
Dòng UR3e, UR5e, UR10e, UR16e, UR20. |
Bước 3: Cân nhắc về Chi phí & Hệ sinh thái
Cuối cùng, quyết định đầu tư không chỉ dựa vào giá mua ban đầu.
Bạn cần xem xét tổng chi phí sở hữu (Total Cost of Ownership – TCO).
- Chi phí đầu tư ban đầu: Bao gồm giá robot, tủ điều khiển, teach pendant, bộ công tác cuối, chi phí tích hợp hệ thống và hàng rào an toàn (nếu cần).
- Chi phí vận hành, bảo trì: Bao gồm tiền điện, chi phí bảo dưỡng định kỳ, và chi phí thay thế các bộ phận hao mòn (dầu, mỡ, pin…).
- Hệ sinh thái và hỗ trợ: Thương hiệu đó có nhà phân phối chính thức tại Việt Nam không? Dịch vụ hỗ trợ kỹ thuật, đào tạo và cung cấp phụ tùng có nhanh chóng và sẵn có không? Một hệ sinh thái mạnh sẽ giúp bạn giải quyết vấn đề nhanh hơn và giảm thời gian dừng máy.
Báo Giá Cánh Tay Robot 6 Bậc Tự Do (Tham Khảo)
Một trong những câu hỏi đầu tiên khi cân nhắc đầu tư là “một cánh tay robot 6 bậc tự do giá bao nhiêu?”.
Điều quan trọng cần khẳng định là không có một con số cố định.
Giá của một hệ thống robot phụ thuộc vào rất nhiều yếu tố.
Tuy nhiên, để giúp bạn có một cái nhìn tổng quan, chúng tôi có thể cung cấp các khoảng giá tham khảo trên thị trường hiện nay:
- Robot cộng tác (Cobot) 6 bậc: Đây là dòng robot dễ tiếp cận nhất.
- Khoảng giá: Từ 400 triệu – 1 tỷ VNĐ (tương đương 15,000 – 40,000 USD).
- Robot công nghiệp cỡ nhỏ (Tải trọng < 20kg): Dùng cho các ứng dụng gắp đặt, lắp ráp tốc độ cao.
- Khoảng giá: Từ 600 triệu – 1.5 tỷ VNĐ (tương đương 25,000 – 60,000 USD).
- Robot công nghiệp cỡ lớn (Tải trọng > 20kg): Dùng cho các ứng dụng nặng.
- Khoảng giá: Từ 1.2 tỷ VNĐ trở lên, có thể lên đến vài tỷ đồng.
Lưu ý quan trọng: Các con số trên chỉ là giá tham khảo cho phần cứng robot cơ bản.
Chi phí cuối cùng của một dự án hoàn chỉnh thường sẽ cao hơn, bao gồm cả bộ công tác cuối, hệ thống an toàn, lập trình, và công tích hợp.
Để nhận báo giá chính xác nhất và được tư vấn một giải pháp được “may đo” riêng cho ứng dụng của bạn, cách tốt nhất là liên hệ trực tiếp với các nhà cung cấp hoặc các công ty tích hợp hệ thống uy tín.
Kết Luận
Cánh tay robot 6 bậc tự do không chỉ là một cỗ máy, mà là một giải pháp công nghệ toàn diện, một nhân tố cốt lõi thúc đẩy quá trình chuyển đổi số trong sản xuất.
Với sự kết hợp hoàn hảo giữa độ linh hoạt, sức mạnh và trí thông minh, chúng đã chứng tỏ được vai trò không thể thay thế trong việc nâng cao năng suất, cải thiện chất lượng sản phẩm và tạo ra một môi trường làm việc an toàn hơn.
Việc đầu tư vào một hệ thống robot 6 bậc tự do là một bước đi chiến lược, một khoản đầu tư thông minh cho sự phát triển bền vững và nâng cao năng lực cạnh tranh của doanh nghiệp trong dài hạn.
Hy vọng rằng qua bài viết chi tiết này, bạn đã có được những kiến thức nền tảng vững chắc và một lộ trình rõ ràng để bắt đầu hành trình tự động hóa của riêng mình.
Nếu bạn đã sẵn sàng để khám phá tiềm năng mà robot 6 bậc tự do có thể mang lại cho doanh nghiệp của mình, đừng ngần ngại liên hệ với chúng tôi qua Hotline, Email hoặc điền vào Form liên hệ để nhận được sự tư vấn chuyên sâu và hoàn toàn miễn phí!
Câu Hỏi Thường Gặp (FAQ)
Lập trình cánh tay robot 6 bậc tự do có khó không?
Mức độ khó phụ thuộc vào loại robot và độ phức tạp của ứng dụng.
Đối với robot cộng tác (cobot), việc lập trình cực kỳ đơn giản, người dùng có thể kéo-thả các khối lệnh hoặc di chuyển tay robot bằng tay (hand-guiding).
Đối với robot công nghiệp truyền thống, việc lập trình đòi hỏi kiến thức chuyên sâu hơn.
Tuy nhiên, hầu hết các nhà cung cấp đều có các khóa đào tạo để hỗ trợ khách hàng.
Thời gian hoàn vốn (ROI) khi đầu tư robot là bao lâu?
Thời gian hoàn vốn (ROI) rất đa dạng, thường dao động từ 1 đến 3 năm.
ROI phụ thuộc vào nhiều yếu tố: chi phí đầu tư, số ca làm việc, chi phí nhân công thay thế, sự gia tăng năng suất, và sự cắt giảm phế phẩm.
Sự khác biệt chính giữa robot cộng tác (cobot) và robot công nghiệp truyền thống là gì?
Sự khác biệt cốt lõi nằm ở an toàn và mục đích sử dụng.
Robot công nghiệp truyền thống cần hàng rào an toàn.
Ngược lại, cobot được thiết kế để làm việc an toàn ngay bên cạnh con người mà không cần hàng rào bảo vệ (sau khi đã có đánh giá rủi ro đầy đủ).
Dịch vụ hỗ trợ kỹ thuật và bảo trì như thế nào?
Các nhà cung cấp uy tín đều cung cấp các gói dịch vụ hỗ trợ toàn diện, bao gồm hỗ trợ kỹ thuật, sửa chữa, cung cấp phụ tùng, và các gói bảo trì phòng ngừa định kỳ.
Khi lựa chọn nhà cung cấp, bạn nên hỏi kỹ về các dịch vụ này để đảm bảo robot luôn hoạt động ở hiệu suất cao nhất.
Tìm kiếm giải pháp hiệu quả cho tác vụ đơn giản?
Đối với các ứng dụng gắp-thả (pick-and-place) hoặc lắp ráp tốc độ cao, cánh tay robot 3 trục mang lại hiệu quả kinh tế và vận hành đơn giản hơn.
Chức vụ: Kỹ sư bán hàng (Sales Engineer)
Với hơn 15 năm kinh nghiệm trong lĩnh vực tư vấn và triển khai các giải pháp tự động hóa, gia công cơ khí chính xác cho các doanh nghiệp trong và ngoài nước, tôi luôn tâm niệm mang đến những hệ thống không chỉ mạnh mẽ về công nghệ mà còn phải thực sự phù hợp với thực tế sản xuất và ngân sách của khách hàng. Tôi tin rằng, sự thành công của khách hàng chính là thước đo chính xác nhất cho giá trị của một giải pháp kỹ thuật.